
发动机可变气门正时机构的动态响应与速度自动化控制
2021-06-04 02:20焦贺彬李富强
制造业自动化 2021年5期
焦贺彬,李富强
(1.河南工业和信息化职业学院,焦作 454000;2.河南农业大学,郑州 450002)
0 引言
车用发动机[1]技术迅速兴起,不断追求“高效、低排放、低能耗”等,汽油发动机由机械式化油器稳步过渡至电子控制喷射、涡轮增压技术等,以提升汽油发动机的燃油经济性、降低排放。汽油机燃烧[2]技术也逐渐提升至快速燃烧技术、均质压燃技术等。可变气门正时技术变频调速技术是汽车工业节能、环保发展的必然趋势,能提高发动机的功率和性能,减少燃油消耗和排放,能更好地满足发动机不同转速和负荷工况下对调速的各种要求,全面提高发动机的综合性能。因此,该领域相关研究者对改变可变气门正时技术进行了很多研究。
韩本忠等人[3]针对CVVL发动机在搭载车辆后出现的加速抖动、熄火与减速转速上冲等现象,研究发动机动态工况控制与优化方法,根据CVVL、节气门与可变气门正时的不同动态控制特性,引入CVVL与可变气门正时响应速度滤波时间,利用三者开度协同控制,完成CVVL与可变气门正时在加减油门过程中的控制效果。该方法可有效提升可变气门正时响应速度,但其速度协同控制效果欠佳。叶年业等人[4]根据电液驱动可变气门机构提出一种负气门重叠配气方法,探讨与汽油压缩着火燃烧性能之间的关系,基于电磁阀输入信号与气门正时相关性,分析信号的线性变化。该方法可有效分析可变气门正时工作原理,但实际对其运行的响应提升效果有待加强。
基于上述方法存在的不足,本文以车用发动机可变气门正时机构的动态响应与速度作为研究目标,通过比例阶段的控制量调节,减小信号偏差,同步改变输入与输出信号,消除惯性与时延,提升响应速度;利用积分控制阶段,去除静态误差,提升正时结构无差度;微分控制阶段通过缩减调节时间、消除惯性作用,大幅度加快发动机可变气门正时结构的响应速度;通过调节基函数、参考轨迹与优化时域等,满足可变气门正时机构的实际速度控制精度、动态响应以及鲁棒性等需求,实现车用发动机可变气门正时机构的动态响应与速度控制。与传统方法相比,该方法提升了可变气门正时机构动态响应和速度控制的效果。
1 可变气门正时机构的动态响应与速度控制
1.1 可变气门正时机构工作原理
为有效分析车用发动机可变气门正时机构的动态响应和速度控制,需要对该机构的工作原理进行分析,其工作原理如图1所示。
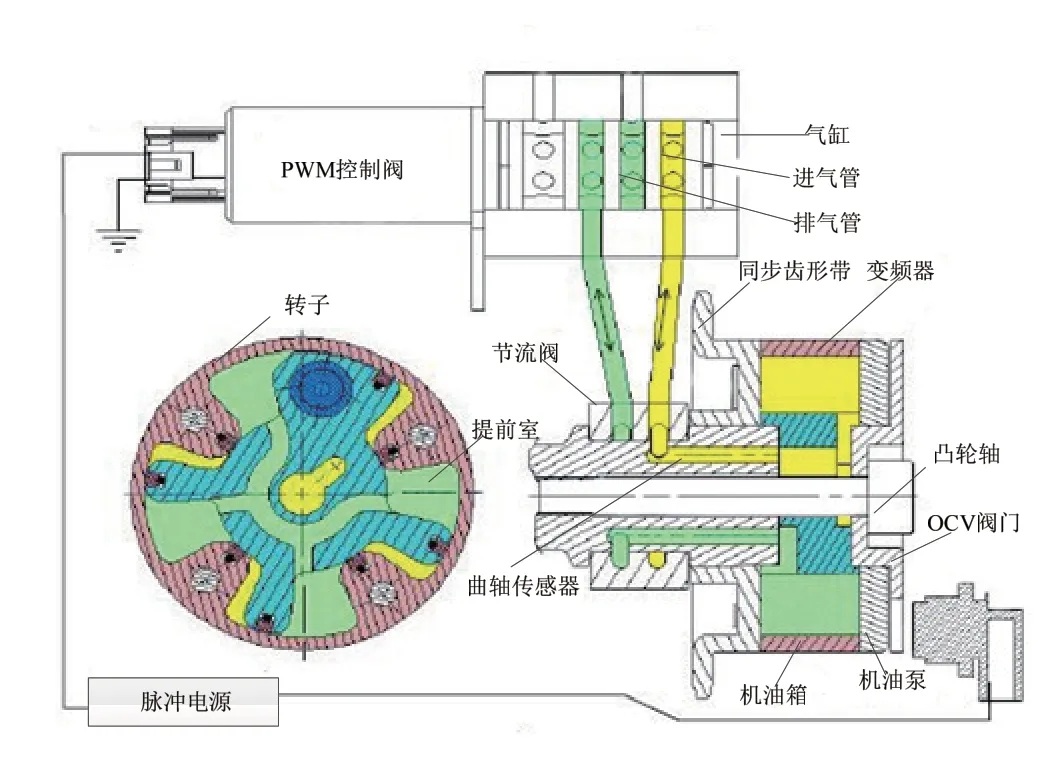
图1 可变气门正时机构工作原理
该结构由变频电机、脉冲电源以及驱动系统等构成。当该结构的止动销和转子咬合时,其凸轮轴链轮和轮子共同旋转,油泵压力提高到一定值时,调整凸轮轴运动角度;当OCV控制阀接收到PWM的消息时,油泵液压注入到该机构的通道中,并抵达提前室凸轮轴和转子旋转方向一致时,气门正时提前,反之则发生延迟[5]。因此,对发动机可变气门正时机构进行有效控制,有助于提升发动机性能。
1.2 可变气门正时机构动态响应
在上述可变气门正时结构工作原理分析基础上,分析正时机构的动态响应控制方法。本文主要通过比例阶段、积分阶段以及微分阶段对其动态响应进行控制。
在比例控制阶段,经过成比例放大正时结构的偏差信号e(t),令比例控制器在正时结构出现偏差时,通过调节控制量缩小偏差。该阶段输出up(t)与偏差信号e(t)间的关系为:

式中,该控制阶段的唯一特性比例参数为Kp,可用于反映控制效果强度。
此时,可变气门正时机构的单位阶跃响应情况如图2所示。

图2 比例控制阶段阶跃响应示意图
在此阶段动态响应控制中,可使输入与输出信号同步改变,消除惯性与时延,响应速度较快。
在积分控制阶段,可去除静态误差,提升可变气门正时结构无差度性能。根据输入与输出信号的比例关系KI,构建下列关系,即:

式中,积分控制阶段的时间常数为TI。
积分控制阶段中可变气门正时机构阶跃响应如图3所示。
图3 积分控制阶段阶跃响应示意图
该阶段输出情况与作用时间t、输入偏差e(t)相关,当输入偏差e(t)较小时,只要作用时间t足够长,仍能够得到较大的输出信号。
微分控制阶段主要体现控制偏差的变化速率,通过缩减调节时间提升正时结构响应速度。输出与输入偏差e(t)间的关系为:

式中,uD(t)为微分控制阶段的输出,TD为微分时间常数,KD表示微分控制阶段输入偏差与输出信号的比例关系。
综合上述各控制阶段,将实际输出值y(t)与给定值yd(t)间的偏差e(t)作为输入信号,计算对应输出信号u(t)为:

在单位阶跃输入下动态控制阶段初期,微分控制阶段生成较大预测控制量,完成快速响应,调节后,积分阶段参与控制;在控制阶段过程中,比例控制阶段凭借无延时优势贯穿始终,微分控制阶段通过超前控制的优越性,令正时机构快速响应;而在控制阶段后期中比例阶段与积分阶段的共同作用下,正时机构静态误差得到消除,控制精度得以提升。
1.3 可变气门正时机构速度控制
在可变气门正时机构速度控制中,本文为提升车用发动机可变气门正时机构的速度控制,将该机构各时间点的控制输入偏差当作基函数线性组合,分析可变气门正时机构速度控制。
利用多个已知基函数Ubn(n=1,2,…,N)的线性组合获取正时机构速度,即:
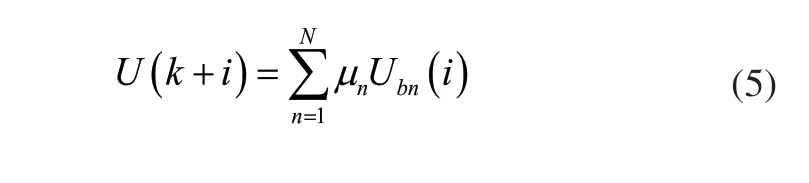
式中,i表示常数,取值范围为i=0,1,…,H-1,基函数数量为N,线性组合系数为μn,t=k+i时刻的基函数值为Ubn(i),控制时域长度为H。
在速度控制过程中,采用自由响应yl(k+i)与受迫响应yf(k+1),获取阶跃动态响应输出ym(k+i)表达式,即:

其中,u(k+i)=0(j≥0)的输出值即为自由响应yl(k+1),受迫响应yf(k+i)相当于零状态响应,即:

式中,Ubn(i)作用下的动态响应输出是gn(i),可在离线状态下获取。
发动机可变气门正时机构的闭环响应需求直接决定速度控制的参考轨迹,其一阶指数形式的参考轨迹为:

式中,参考轨迹为yr,设定值为c,正时机构输出为ym,系数,其中,采样周期与参考轨迹响应时间分别是Ts与Tr。
在实际应用中,若正时机构速度为已知设定值,则可顺利解得参考轨迹值;若为未知设定值,则可以假设设定值为一常数,与当前设定值相等,利用式(8)求解参考轨迹值yr(k+i)。
二次输入、时变性、噪声与非线性等因素极易影响速度控制效果,需要对其进行反馈误差的校正。引入时域优化产生的误差到前馈量参考轨迹中进行补偿,校正后的误差e(k+i)为:

式中,当前k时刻的动态响应输出为yp(k)。
然后对动态响应输出控制最小化,即:

在动态响应输出控制最小化前提下,优化动态时域,完成其速度控制,即:

式中,优化时域上下限分别为H1与H2,控制阶段的动态响应输出为
综上所述,可变气门正时机构的控制通过调节基函数、参考轨迹与优化时域等,满足可变气门正时机构的实际速度控制精度、动态响应以及鲁棒性等需求。
2 实验分析
2.1 实验设备
为验证所提方法的有效性,在MATLAB平台上进行实验分析,选择某一车辆内的可变气门正时机构为实验对象,对其动态响应及速度控制进行分析。
2.2 实验参数
实验参数如表1所示。
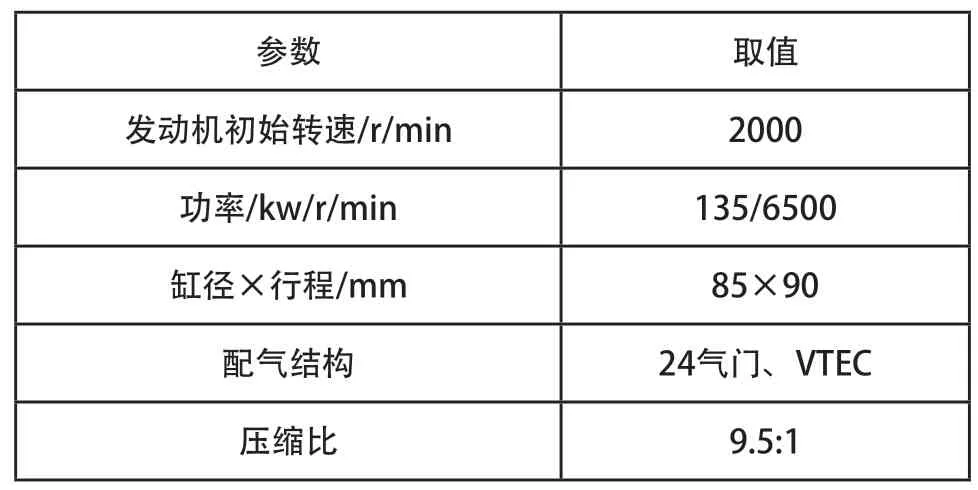
表1 实验参数
2.3 实验方案
分别从润滑油温度、速度跟踪以及发动机能耗三个角度,分析所提方法、CVVL发动机动态工况优化控制方法以及电液驱动可变气门机构性能试验及应用方法的可变气门正时机构动态响应及速度控制影响程度进行分析。
2.3.1 不同温度动态响应速度分析
在实验用发动机的初始转速为2000r/min时,分析不同润滑油温度下所提方法、CVVL发动机动态工况优化控制方法以及电液驱动可变气门正时机构性能试验及应用方法的正时机构动态响应速度,实验结果如图4所示。
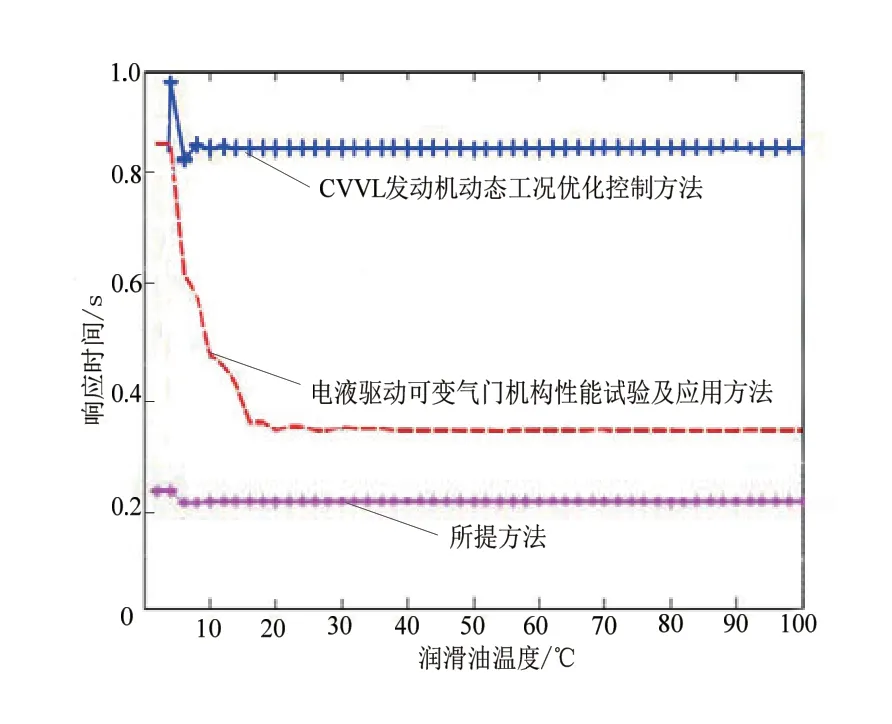
图4 不同温度下三种方法动态响应时速度分析
根据图4中的曲线走势可以看出,从整体趋势上来讲,由于机油运动粘度随润滑油温度的不断升高而降低,影响液压系统的流动,在正时机构的动态响应速度较快,在润滑油温度不断变化时,三种方法的响应速度存在一定差距。其中,所提方法的可变气门正时机构的响应速度较快,且始终处于稳定状态,约为0.2s,而其他两种方法随润滑油温度改变,其动态响应速度均存在一定程度的波动,且响应时间均高于本文方法。这是由于所提方法在可变气门正时结构动态响应中通过比例控制、积分控制以及微分控制三个阶段,调整了该机构的性能,改善了其响应效果。
2.3.2 可变气门正时机构速度控制分析
假定发动机初始条件分别是温度80 ℃、转速2000r/min、压力0.45MPa,分别采用所提方法、CVVL发动机动态工况优化控制方法以及电液驱动可变气门正时机构性能试验及应用方法,对可变气门正时机构的速度控制进行分析,得到速度变化曲线与实际速度曲线的对比结果如图5所示。
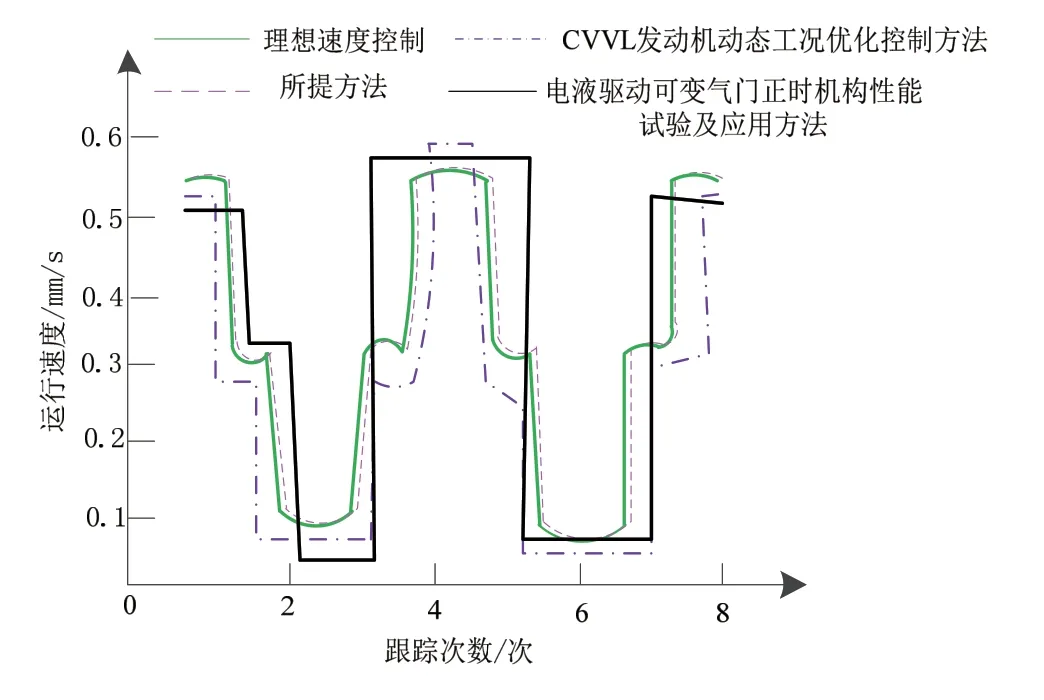
图5 不同方法可变气门正时机构速度控制分析
分析图5 可以看出,采用三种方法对实验用发动机的可变气门正时机构进行速度跟踪中,跟踪的效果存在一定差别。其中,所提方法的速度跟踪效果与理想效果较为吻合,运动轨迹较为一致,而其他方法的跟踪效果与理想效果差距较大。这是由于本文方法基于阶跃动态响应模型,将时域优化产生的误差作为前馈量,并引入参考轨迹加以补偿,抑制了可变气门正时机构的较大惯性,更容易实现速度的有效控制。
2.3.3 不同方法发动机能量利用率分析
实验中分析了三种方法改进发动机可变气门正时结构后的能量利用率,实验结果如图6所示。
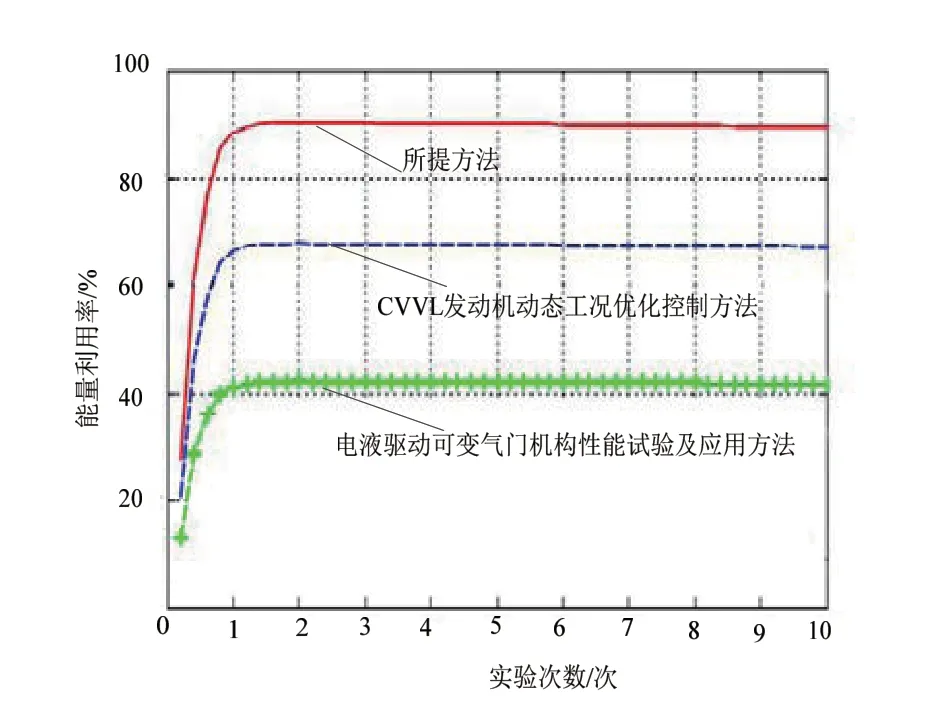
图6 不同方法能量利用率对
分析图6可知,采用三种方法对实验发动机的可变气门正时机构改进后,三种方法的能量利用率存在显著差异。其中,所提方法的能量利用率最高可达约为90%,其他两种方法的能量利用率最高分别约为65%和42%。相比之下所提方法的能量利用率更高,验证了所提方法降低了发动机的运行能耗。
3 结语
本文提出车用发动机可变气门正时机构的动态响应与速度控制方法。根据车用发动机可变气门正时机构的工作原理,将其动态响应特性分为三个阶段进行调整,并构建具有基函数、阶跃动态响应、参考轨迹、反馈校正以及滚动优化等基本特征的可变气门正时机构速度控制。与传统方法相比具有一定优势。尽管取得一定的研究成果,但因为研究条件存在局限性,需在今后的工作中对以下方面进行改进:
1)设计的实验台架只能检测固定转角范围中的动态响应情况,无法实现任意相位转角响应速度检测,应探索更好的台架设计模式与相位器动态响应检测策略;
2)将进一步研究可变气门正时机构的工作状态、结构可靠性与响应特性要求,对比发动机安装与未安装该机构的性能区别。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
光通信研究(2020年2期)2020-06-15
汽车与新动力(2019年5期)2019-11-07
科技创新与应用(2019年17期)2019-06-09
系统医学(2016年8期)2016-02-20
农机使用与维修(2014年6期)2014-09-23
河北农机(2014年2期)2014-03-30
汽车与新动力(2014年4期)2014-02-27
