基于系统模型的机器人创新实验设计
2021-06-04 08:39:46殷建
铜陵学院学报 2021年2期
殷 建
(铜陵学院,安徽 铜陵 244061)
机器人是集机、电、控制、人工智能等技术相互交叉融合的产品,是目前新工科建设中最具代表性的前沿交叉学科之一。当前我国生产制造智能化改造升级的需求日益凸显,机器人的应用领域逐渐由搬运、焊接、装配等操作型任务向加工型任务拓展。同时,随着近年来国家对环保和民生问题的高度重视,特别在化工以及与民生相关的环保、食品、饮料和制药等行业中机器人的应用范围越来越广。面对日益增长的机器人人才需求状况,近两年我国高校特别是很多地方应用型高校都开设了机器人工程专业。面对复杂的机器人系统进行有效的设计还很缺乏,导致在学生的学习过程中,创新能力和实践能力怎样得到充分锻炼,努力缩小“学与用”之间的差距是提高高等教育质量,更是改善专业技术人才严重紧缺的关键。但是目前的机器人专业大多数课程偏重于课堂讲授,动手实践课程或实践项目,特别是针对工厂生产实际应用的实验项目设计非常欠缺。因此,增强机器人实验教学的设置和探索,实验项目创新设计的改革十分必要[1-3]。
当前,地方应用型高校较多的实验教学都是验证型教学实验,传统的实验教学存在推广性差、验证性实验多、跨学科综合创新实验少的不足,导致机器人专业人才培养短板开始突现。由学生自己动手进行的创新型的实验项目严重缺乏,存在很多制约创新人才培养的问题。因此创新性实践教学是各高校进行实验教学、培养学生多学科综合能力的重要方面[4]。
本文以铜陵学院机器人工程专业课程实验为例,作者根据工程教育专业认证标准要求,结合机器人专业实验教学现状,对《机器人学》课程中应用到的机器人创新设计实验项目进行了探索与实践,以工业和科研中常用的六轴协作机械臂设计为例进行创新设计方法探讨。学生要进行创新实验设计,需要有对实际问题了解、分析并运用知识进行解决的能力。为此需要构建基于模型的创新实验教学项目体系,开发具有工程实践背景的创新型实验项目,以此来激发学生自主创新探索的能力[5-6],以解决复杂工程问题。
一、基于Matlab的系统模型设计方法介绍
学生在进行创新实验项目设计时,首先要求充分理解项目设计的要求,然后充分利用各种手段(例如同学间讨论,网上搜索、请教老师等)去尝试完成这些实验项目设计,要把所学知识顺利应用到实验设计中去。让学生经历一个机器人如何动、怎么动、动的效果怎样?机器人与视听触等感知模块和外围自动设备之间如何协作的认知过程。同时在这个实验项目设计过程中,还需要安排一定数量的机器人控制器的基础性实验,让学生设计一些如各类电机的控制、外部传感器信号采集等关键模块的应用。要求学生学会如何使用Matlab,Simulink和MBD等先进的软件工具进行创新实验项目设计[7-8]。
机器人产业发展对工程科技人员需求,将产业和技术的最新发展、行业对人才培养的需求引入教学过程,积极探索综合性、问题导向、交叉专业,把握新工科人才的核心素质,培养创新思维、工程思维。基于系统模型的工程设计要在系统开发的不同阶段建立相应的系统模型,利用高层次的编程语言进行设计、仿真和系统实现。
近十年来,许多国防、航空航天、汽车、和数字通信等行业的著名高科技公司,如宝马、丰田、波音、爱立信等,纷纷接受 “基于系统模型的工程设计(MBD)”思想,采用MATLAB和Simulink作为全公司进行系统仿真、设计、测试和验证的软件平台。
如图1所示,基于系统模型的工程设计要在系统开发的不同阶段建立相应的系统模型,利用高层次的编程语言进行设计、仿真和系统实现。Mathwork公司在Simulink平台基础上,开发并推出的一系列系统设计工具,为实际系统的性能测试、设计实验提供高效的开发环境。在此基础上,工程技术人员可以大幅提高工作效率、缩短设计时间和产品开发周期。
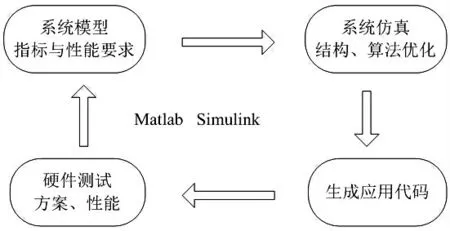
图1基于系统模型设计流程
二、六轴协作机械臂运动学控制设计
协作机器人能够满足任务多样性和环境复杂性的要求,用于执行与未知环境和人发生交互作用的操作任务,是下一代机器人的重要发展方向。本文选用的六轴协作机器臂开发系统为负载3kg的轻型协作机器人,结构小巧,拥有一体化的驱动器和六轴运动控制器,六轴协作机械臂系统是由六轴机械臂本体、控制系统、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。驱动控制系统是基于TMS320F28335 DSP控制器和MATLAB/Simulink环境开发,为教学和科研提供优越的开放性支撑。
机器人运动学控制系统选用合动智能公司的cSPACE控 制 器,拥 有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机模拟和嵌入式实时控制技术,能实现快速控制原型(RCP)设计的功能,也是基于模型设计(MBD:Model-Based Design)典型的产品。
系统以图形化的建模工具如MATLAB/Simulink对复杂逻辑进行设计、分析、仿真,可视化程度高、思路清晰、目标明确、简单易懂,便于查找错误、维护方便(如图 2所示)。可通过对MATLAB/Simulink对控制算法进行仿真,将输入、输出接口替换为公司的cSPACE模块,编译并自动生成DSP代码,在cSPACE上运行后就能方便地实现对被控对象的控制。同时系统还可运行Simulink搭建的被控对象的模型,模拟被控对象,通过输入接口接收控制量的输入,输出接口输出被控对象的状态,测试实际的控制器,实现硬件在回路仿真功能。在硬件设计的同时,软件设计即可全面展开,大大缩短了开发周期。从软件开发的第一步开始,工程师就可以通过自动代码生成,观察结果,调试逻辑,大大加快调试进度。学生采用成熟工具,可以实现代码自动生成,完全避免了手工编码的低级错误。并且在设计修改后,极短时间内即可重建系统软件,而无须进行多次反复测试采用建模工具及辅助设备,可以在模型建立后,立即实现快速原型仿真,用户马上可以看到设计运行的结果,工具可以协助用户及时修改需求,在最短的时间内完善需求设计。
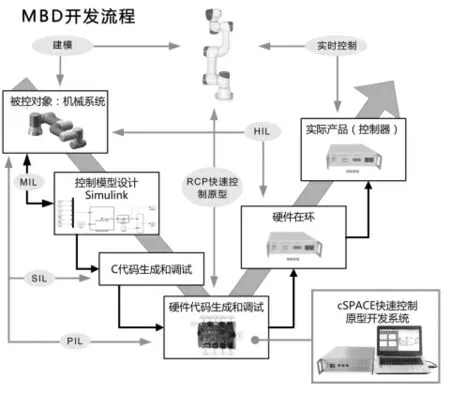
图2基于MBD的六轴机械臂控制系统流程设计
三、虚实结合的机器人创新设计过程
机器人运动学、动力学实验项目在设计过程中不可避免会与理想状况产生偏差,导致性能参数难以达到设计要求,往往需要对硬件系统反复进行调试,不仅仅针对电控部分,还需要和机械部分进行联合调试,修正-调试不断反复,特别是机电联调非常麻烦。基于模型的设计可以利用数字孪生技术进行虚实结合的仿真调试,数字孪生就是通过物理硬件(如轴承、机械臂、电机等)、自身嵌入式软件系统及通信模块,构成含有“感知-分析-决策-执行”数据自动流动的基本闭环,集成多学科、多物理量、多尺度的仿真过程,在虚拟空间中完成对物理实体的映射。可将物理实体和系统的属性、结构、状态、性能、功能和行为映射到虚拟世界,通过将物理实体中的属性、规律、知识等体现在数字虚体中,在实物机器人上安装传感器,在实验过程中,将传感器采集的数据传递到产品的数字孪生模型,通过对数字孪生模型进行仿真和优化,从而改进和提升最终定型产品的性能[9-12]。在数字虚体中进行计算、仿真、优化等,并对物理实体进行驱动,形成虚实融合的数字虚体-物理实体虚体。通过物理场景与虚拟场景设备的同步、异步监测、控制与分析,实现虚拟仿真与现实运动无缝结合,大大提高设计的效率,提升学生对系统控制过程的认识深度。
本实验设计流程如下:首先通过Solidworks三维建模软件建立六轴协作机器人三维数字模型(如图3所示),将各个关节之间配合约束设成重合和同轴,同时将装配体的初始状态配置成建立D-H参数的状态;其次把Solidworks三维模型导出为Simscape模型,在CSPACE控制器中建立Simulink控制模块,配置各关节参数属性,搭建驱动模型,编写机器人运动学算法,实现Simscape物理模型仿真。再将模型算法通过自动代码生成到机械臂的控制芯片中,实现机械臂的运动学和动力学控制(如图4)。
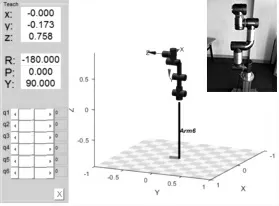
图3数字虚体和物理实体间协同设计
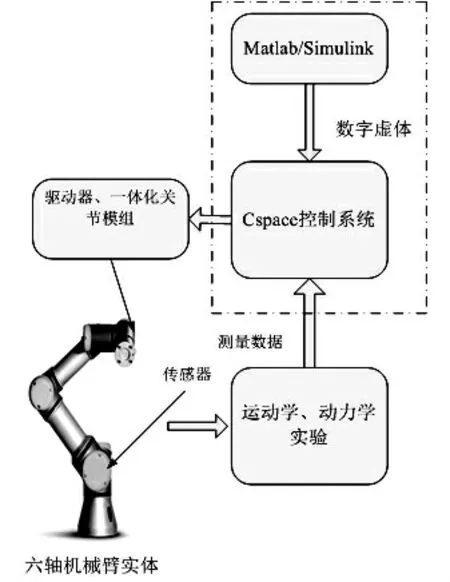
图4基于数字虚体的开发流程图
四、结论
基于系统模型的创新设计方法,具有很好的开放性,可方便地进行硬件扩展,图形化、在线修变量,自行编写软件代码,可以在模型建立后,立即实现快速原型仿真,用户马上可以看到设计运行的结果,工具可以协助用户及时修改需求,在最短的时间内完善需求设计,加快学生创新能力的培养。通过虚实联动,可得到矫正好的系统模型,提高仿真准确性,在不需要建造实际系统的情况下,在仿真里测试了机械臂运动学、动力学控制,并通过物理实物进行验证,减少实验设计的时间。六轴协作机械臂的控制系统设计,可以让学生了解机器人机械结构、驱动传动、传感器、控制器以及程序编写的知识,让学生更好地了解运动学、动力学建模与控制、精密轨迹控制,结合工程实践理解环境、作业对象。
猜你喜欢
当代工人(2020年8期)2020-05-25 09:07:38
作文成功之路·小学版(2019年8期)2019-09-18 01:12:04
小溪流(画刊)(2017年12期)2018-01-10 16:07:29
读者(2017年14期)2017-06-27 12:27:06
科技知识动漫(2016年8期)2016-07-29 20:40:09
读写算(下)(2016年9期)2016-02-27 08:46:31
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25 00:41:49
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08