
模块化多用途小型堆水下电视检查系统研制
2021-06-04 02:02
中国核电 2021年2期
(中国核动力研究设计院,四川 成都 610041)
模块化多用途小型堆(ACP100)在役检查时,按照技术条件要求,需要对压力容器内部进行目视检测。而压力容器内部是处于一个高温、高压和高辐射的水下环境[1],无法直接进行人工检测,需要研制专门的检测设备对其进行目视检测。
通常水中进行目视检测所用的设备是水下电视检测系统[2],对水密性要求较高。但由于压力容器是高辐射的环境,在此环境下的水下电视检测系统不仅水密性要求高,同时对系统的耐辐射性要求也很高。因此,需要针对压力容器的特殊环境研制高耐辐射性的水下电视检测系统。
1 系统组成
水下电视检测系统主要包括:水下机器人主体、便携式控制机箱、便携式工控机、零浮力电缆及卷线盘。
水下机器人主体:主要由控制系统、主体推进器(三套)、前后摄像监视系统、前摄像机一维云台、机械手系统、 照明系统、浮筒及平衡配重系统。其中控制系统含主控制器、电源模块、电机驱动模块、压力传感器(深度计)、温度计等传感器组成,如图1所示。图2是水下电视检测系统使用布局示意图。

图1 水下机器人主体Fig.1 The main body of the underwater robot
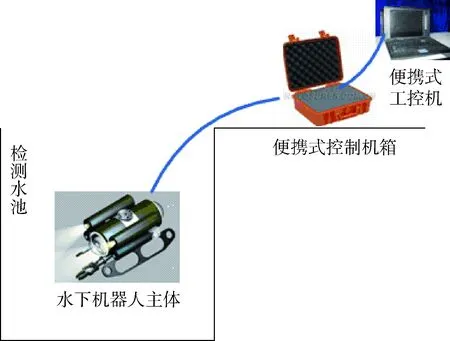
图2 系统使用布局示意图Fig.2 The schematic layout of system usage
2 性能要求
2.1 主要功能和技术指标
水下机器人主体外型尺寸不大于630 mm×350 mm×350 mm,重量不大于15 kg。
水下机器人制造材质的卤素含量应满足RCCM F6000要求。
保证样机25 m水深的水密性。
水下机器人具有前进、后退、转弯、上浮、下潜运动功能。前进速度≥15 m/min,后退速度≥12 m/min,下潜速度≥8 m/min,上浮速度≥5 m/min,速度且连续可调。转弯半径不大于0.5 m。
具有两套视频摄像系统,分别安装于正前方及后方,以检查与监控前进及后退运动。前后分别带两路照明系统且亮度可调。前摄像系统变焦范围26倍,且具有手动/自动对焦功能,附一维转动范围±90°俯仰云台;后摄像系统为视场角为35°的定焦系统。
能对缺陷进行初步定位。
耐辐照:承受累积剂量不小于105Gy,承受最大剂量不小于103rad。
外配工控机可实现对显示图像的硬盘存储、抓图、回放等功能;可实时显示水下机器人所处位置水深、温度等信息;存储空间不小于1 T。
摄像机灵敏度优于2 Lux,水平分辨率可达到400线以上。
2.2 工作环境条件
温度:0~50 ℃;
相对湿度:≤95%;
放射性水平:累计剂量不小于107rad,承受最大剂量不小于103rad;
电源:220 VAC,50 Hz。
3 系统结构设计
水下机器人主体:主要由主体推进器(三套)、前后摄像监视系统、前摄像机一维云台、机械手系统、照明系统、主浮力机构、平衡配重系统及机械手组成。如图3所示。
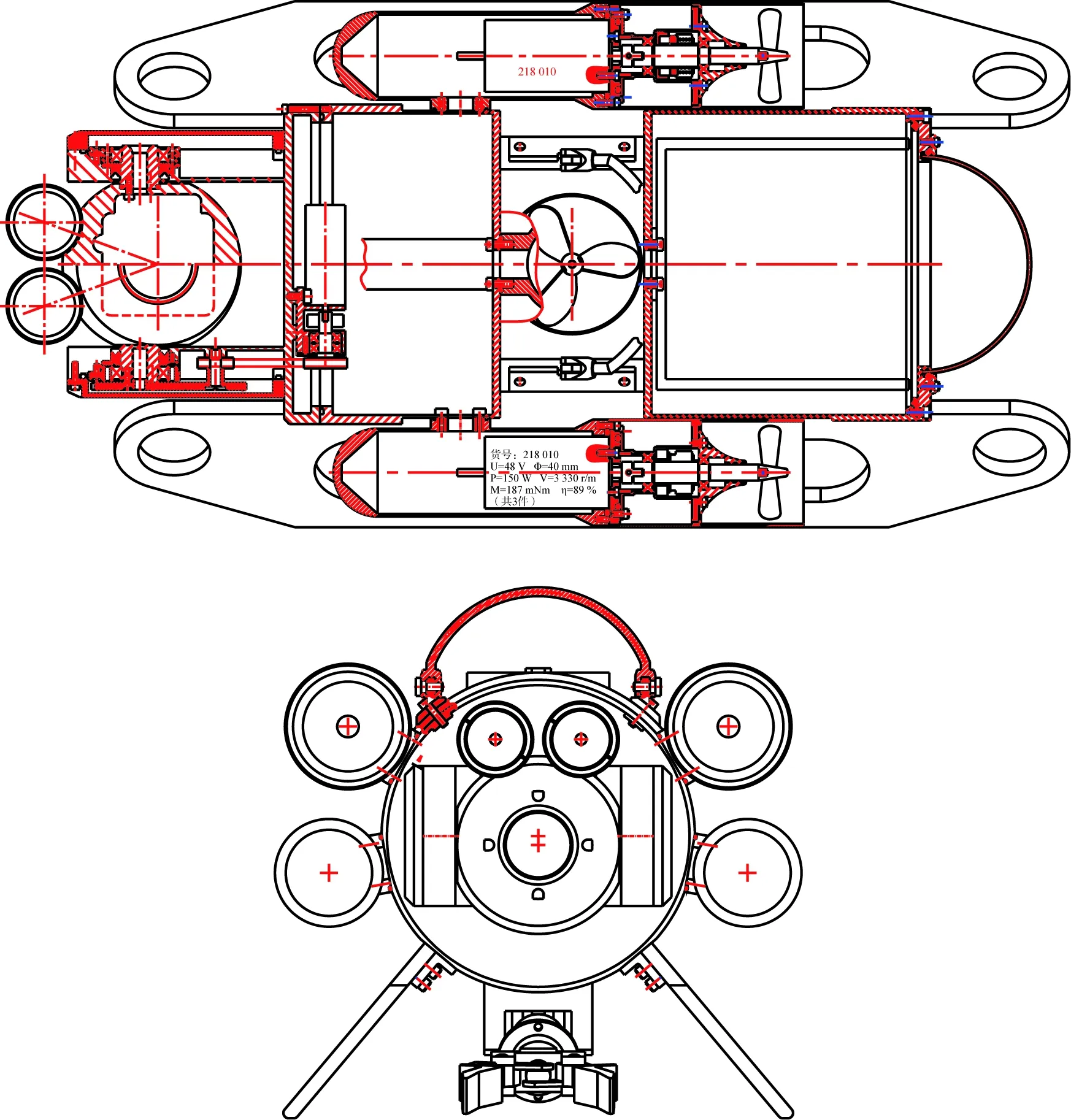
图3 整体系统结构图Fig.3 The overall system structure
3.1 主浮力机构
浮力系统通过垂直推进系统将前后两浮筒固定连接,浮筒内部腔体可装配电路控制系统部件、传感器、一维转动云台及摄像系统,有效利用了结构空间。
浮筒外可固定照明系统、前后推进系统、机械手、提手、支撑架等,此设计有利于合理安排各部件位置使整体结构紧凑。浮力系统如图4所示。
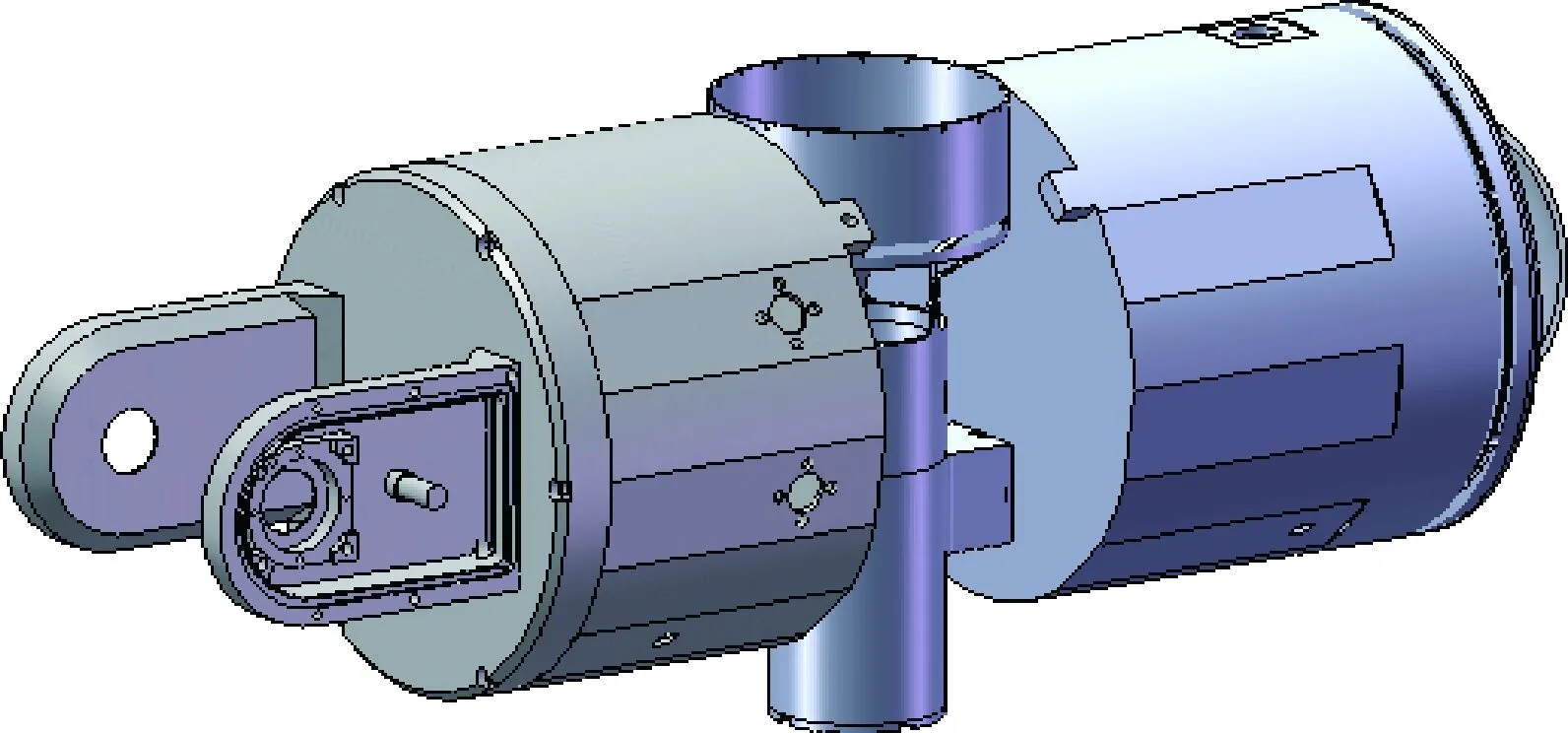
图4 主浮力系统示意图Fig.4 The schematic of main buoyancy system
3.2 前后摄像监视系统
监视系统由电机、传动带、轮、像机、支架等,由电机通过轮、带传动实现一维转动要求。一维转动范围±90°,且配有随动照明,能对不同位置物体进行观察。摄像系统如图5所示。
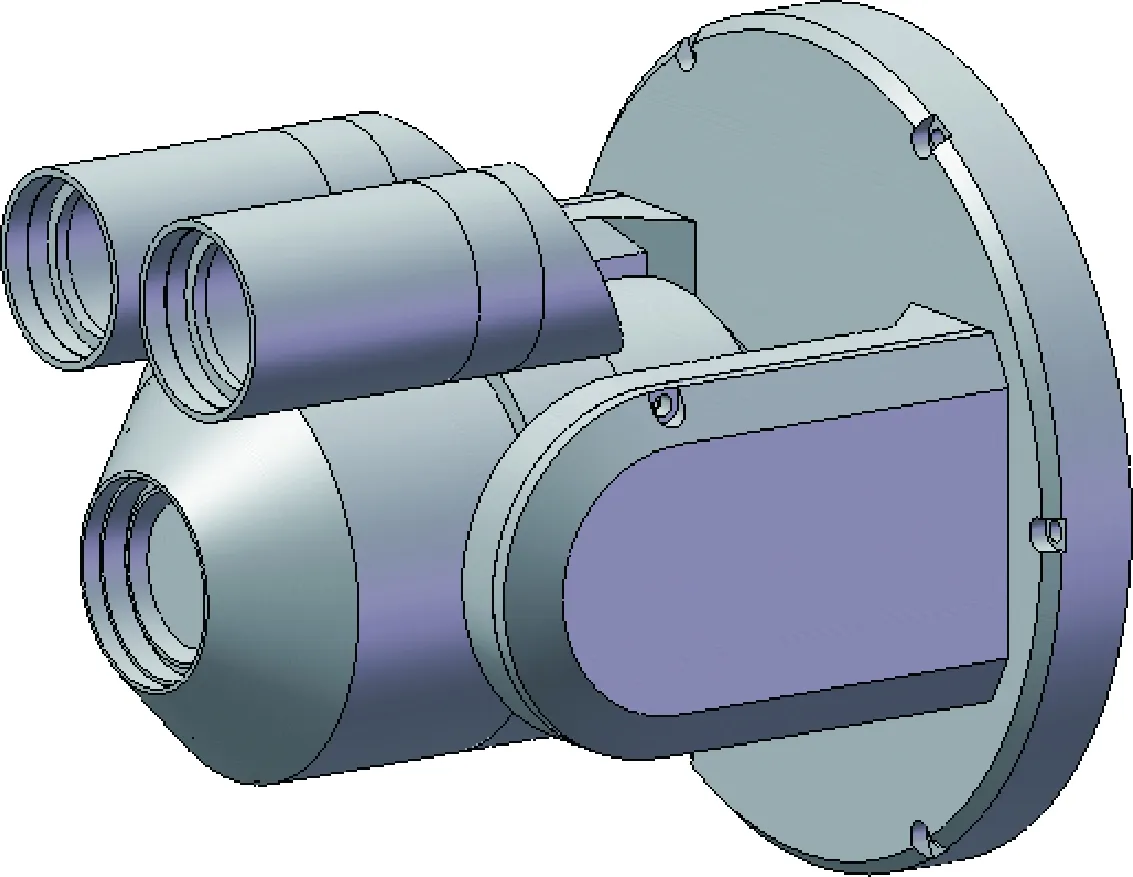
图5 一维转台示意图Fig.5 The schematic of one-dimensional turntable
3.3 照明及前后推进机构
照明系统提供200 W照明,共两套,分别左右对称,固定在浮筒两侧重心上部,其外壳可作为辅助浮力系统,有利于机器人在水中的整体平衡;结构如图6所示。
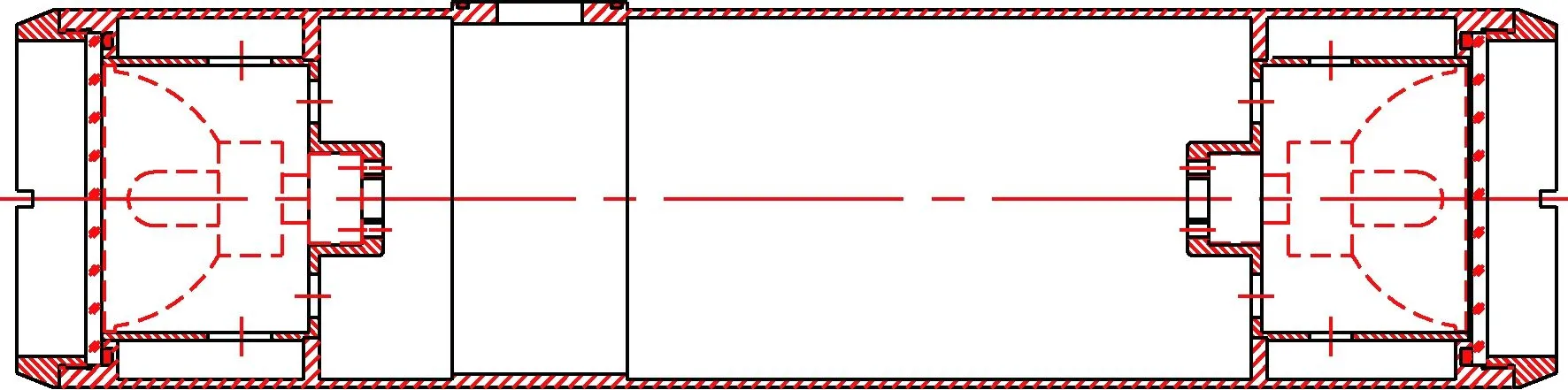
图6 照明平衡机构示意图Fig.6 The schematic of lighting balance mechanism
3.4 垂直推进机构
推进系统包括直流电机、高速动密封机构、推进螺旋桨和外罩等。
(1)垂直推进系统
置于整个机构三维几何空间两立面交汇处,也是整体重心与浮心交点处,此设计安排优点在于可使机器人运动时上升与下降能平稳、可靠、高效运行。垂直推进系统如图7所示。
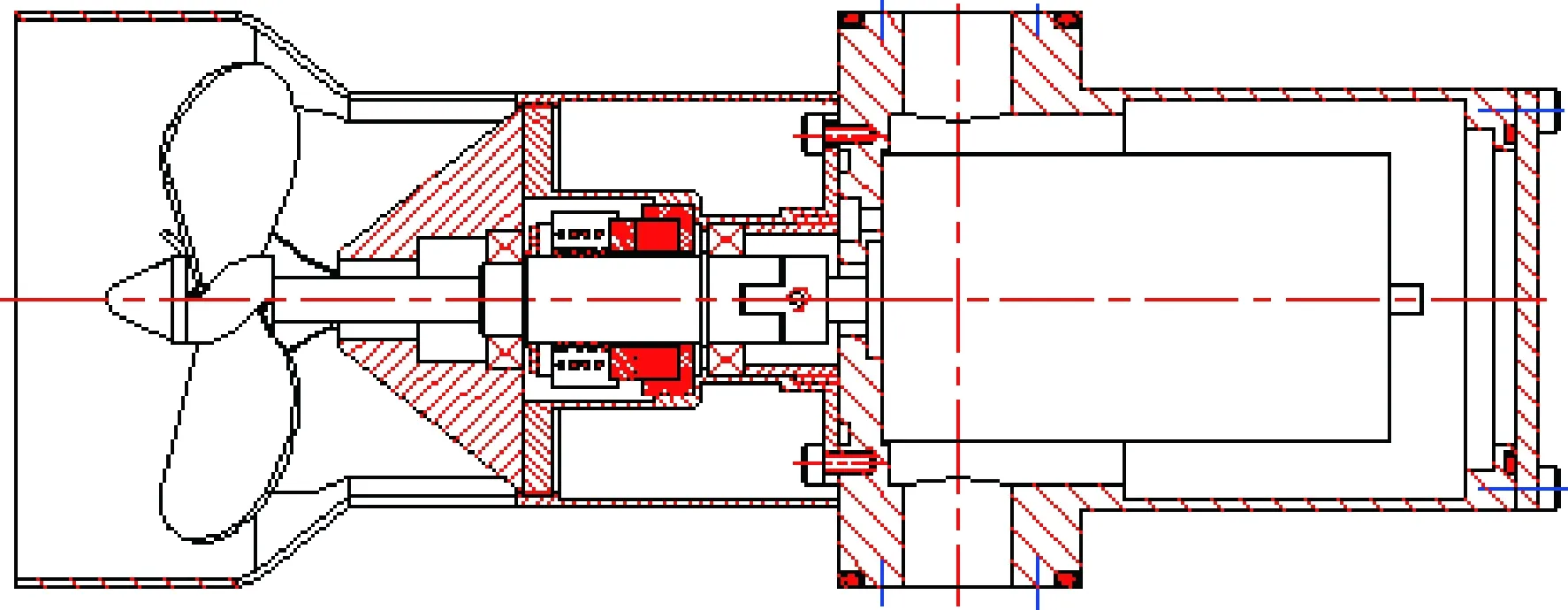
图7 垂直推进机构示意图Fig.7 The schematic of vertical thruster
(2)前后推进系统
前后推进系统施力点与重心位于整体机构的同一水平面内,确保了整体行进时的平稳性与可靠性。前后推进系统如图8所示。
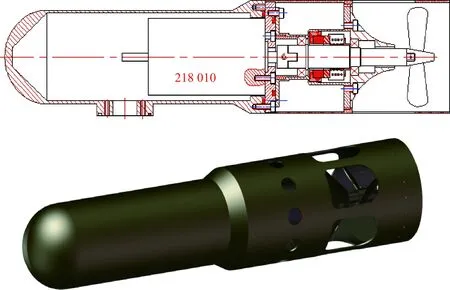
图8 水平推进器机构示意图Fig.8 The schematic of horizontal thruster
(3)机械手
机械手置于主体前方靠下位置,能在摄像系统监视下进行可视夹取;机械手指可根据夹取异物的形状更换不同类型,结构简易,运动灵活。机械手如图9所示。
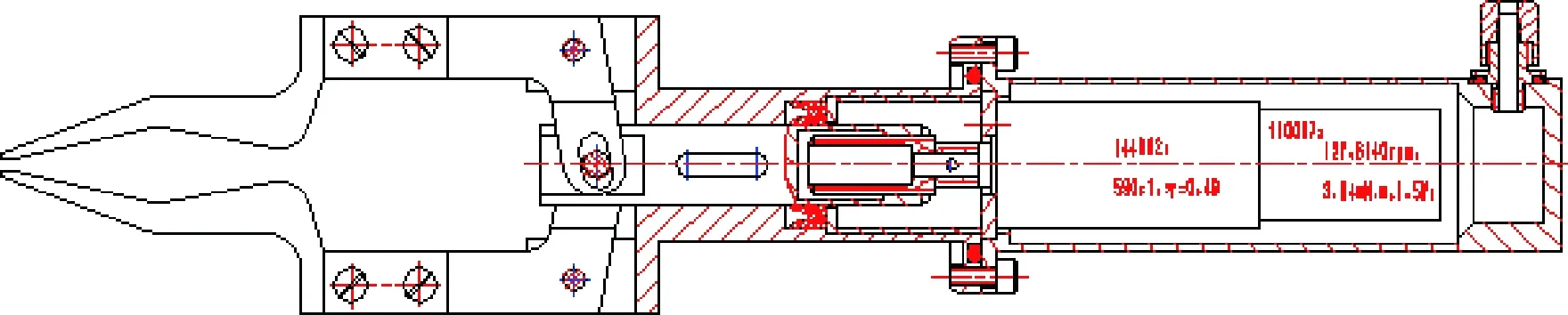
图9 机械手机构示意图Fig.9 The schematic of manipulator mechanism
(4)密封设计
选择采用机械密封方式,其结构示意图如图10所示。轴1带动动环3旋转,静环2固定不动,依靠静环2和动环3之间接触端面的滑动摩擦保持密封,当端面产生磨损时,弹簧推动动环3使动环3与静环2的端面紧密贴合而无间隙。为了防止介质从静环2与壳体之间的间隙泄漏,装有O形圈。
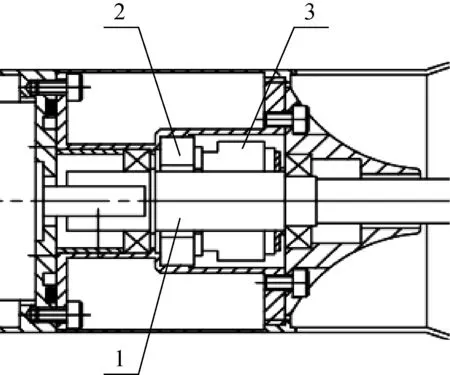
图10 推进器机械密封示意图Fig.10 The schematic of the mechanical seal of the thruster
4 电控系统设计
整体系统主要由三部分组成,包括控制机箱、工控机、水下机器人本体。其结构框图如图11所示。
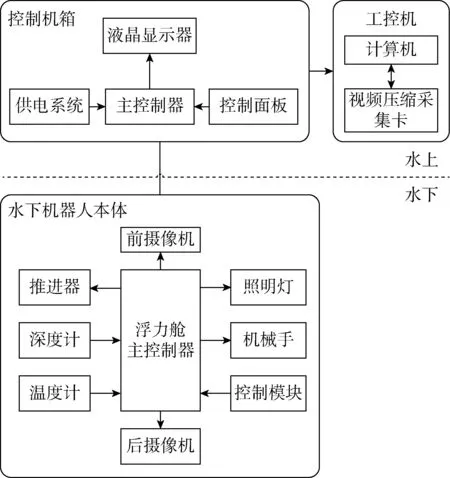
图11 控制系统结构框图Fig.11 The structure block of the control system
4.1 便携式控制箱电控系统设计
主要由液晶显示器、传感器信息显示器、控制面板、控制电路板、电源模块等组成,其结构框图如图12所示。
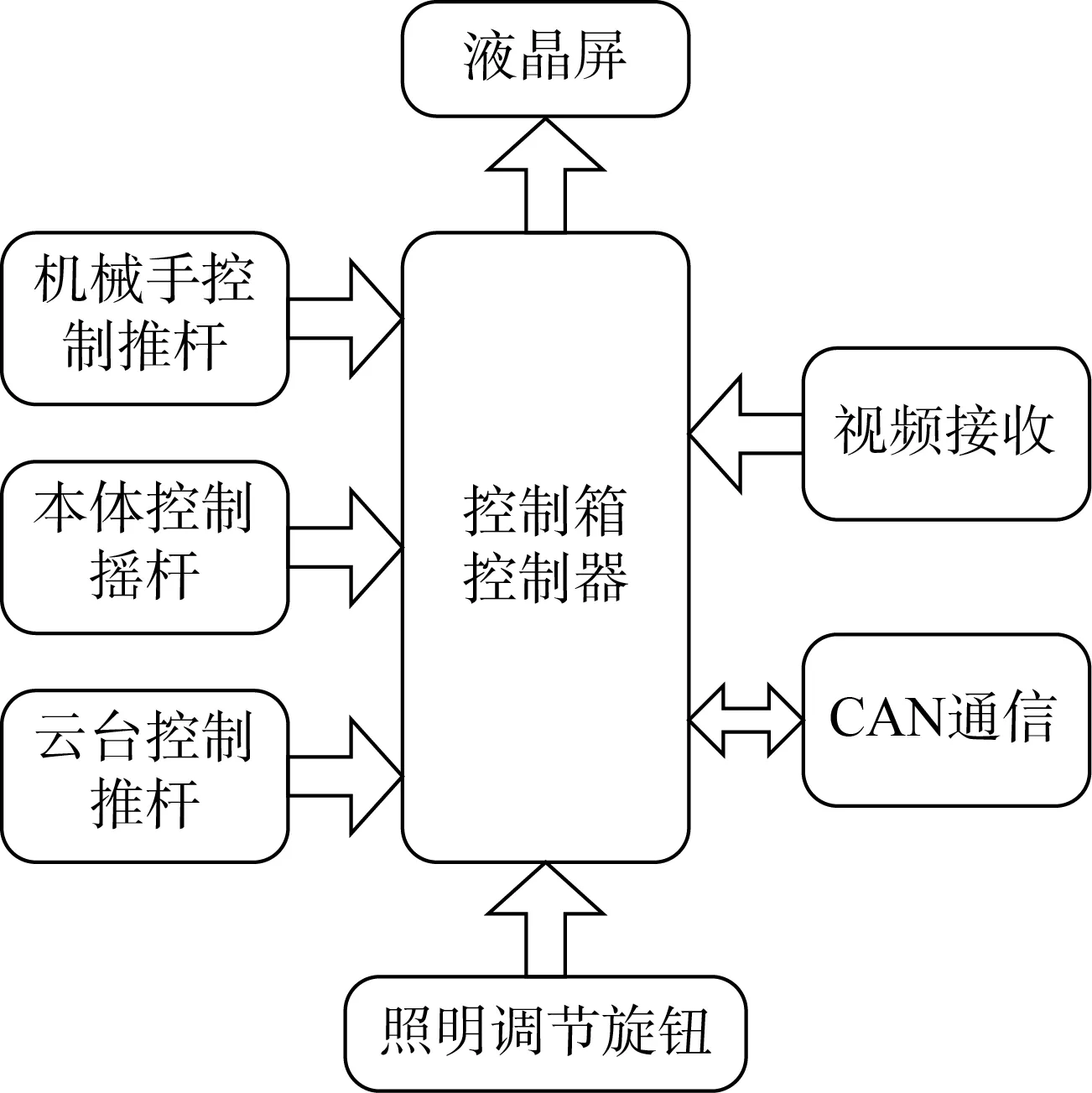
图12 控制机箱电控系统结构框图Fig.12 The structure block of the electronic control system of the control chassis
主控制器采用TI公司推出的MSP430系列的MSP430F149作为主处理器,这是一类具有16位总线的带FLASH的单片机,由于其性价比和集成度高,受到了广大技术开发人员的青睐。该控制器可以在超低功耗模式下工作,对环境和人体的辐射小,可靠性能好,加强电干扰运行不受影响,适应工业级的运行环境。
根据控制箱功能的要求,采用I/O口作为按键输入口、A/D口作为摇杆的输入口、传感器显示器采用并口方式进行通讯。
4.2 机器人主体电控系统设计
主要由主控制器电路板、电机驱动板、电源模块、照明调节板、传感器信息采集电路等组成,其结构框图如图13所示。
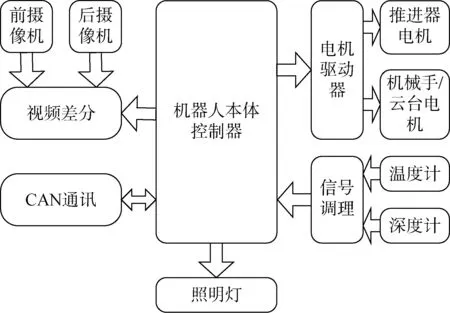
图13 机器人主体电控系统结构框图Fig.13 The structure block of the electronic control system of the robot main body
主控制器采用TI公司推出的MSP430系列的MSP430F149作为主处理器,根据机器人本体功能的要求,扩展了电机驱动的PWM口、A/D口、SPI口等常用接口。
对于前后视频显示,采用专用视频切换芯片ISL59441,后端采用视频补偿电路,使之补偿到标准视频信号幅度。
4.3 CAN通讯系统的设计
近年来,随着计算机、信息、控制技术的发展和微机化仪器仪表的成熟和广泛使用,现场总线网络逐步取代传统的独立控制系统、集中采集控制系统,CAN(控制器局域网)总线技术是现场总线技术中运用最为广泛的一种,尤其适合用于模块化的系统设计。
一般来说,CAN智能节点的实现有两种方式,一是微控制器配合独立的CAN控制器,另一种是微控制器内嵌CAN控制器。这里采用了第一种方式,即MSP430单片机+MCP2515CAN控制器方式。
MCP2515是Microchip公司推出的具有SPI接口的独立CAN控制器,集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理(包括位填充、数据块编码、循环冗余检验等)。它完全支持CAN2.0 A/B技术规范,通信速率最高可达1 Mbps,内含3个发送缓冲器、2个接收缓冲器、6个29位验收滤波寄存器和2个29位验收屏蔽寄存器;它的SPI接口时钟频率最高可达10 MHz,可满足一个SPI主机接口扩展多路CAN总线接口的需要。
在接口芯片上,采用了广州致远电子有限公司推出的CTM8250,这是一款带隔离的通用CAN收发器芯片,内部集成了所有必需的CAN隔离及CAN收、发器件,这些都被集成在不到3 cm2的芯片上,极大的减少了电路设计方面的工作量,同时也提高了系统的可靠性。该芯片的主要功能是将CAN控制器的逻辑电平转换为CAN总线的差分电平并且具有DC 2500 V的隔离功能。
4.4 软件系统设计
控制系统的软件是整个控制系统正常运行的重要环节之一,系统软件的质量直接关系到系统功能的实现。在控制系统中,大体上可分为数据处理、过程控制两个基本类型。数据处理包括:数据的采集、数字滤波等。过程控制程序主要是使微控制器按一定的算法进行计算,然后再输出,以便移动机器人的控制。
为了完成上述任务,在软件设计时,采用了一种模块程序设计法,即把整个程序过程分成若干个部分,封装成独立的函数模块,这样易编写调试,并且一个模块可被多个任务在不同条件下调用。
(1)各主控制器程序设计
在系统上电之后,节点控制器进行初始化,主要完成片上外设的初始化,主要是选择时钟、对看门狗的配置、I/O的设置、定时器的设置以及SPI模式的设置等。接着是CAN控制器初始化,主控制器通过SPI在配置模式下向控制段中的寄存器写入控制字来完成。开总中断,检测总线是否有中断发生,如有接收数据,解析命令,判断功能函数是否限位可执行,允许的话,则执行功能函数,同时检测功能模块状态信息,并向上位机发送状态信息数据,返回退出。
(2)CAN控制器MCP2515的初始化
要想使CAN智能节点、PC端互相进行通信,CAN总线上的所有器件都必须使用相同的波特率。CAN位时间由互不重叠的时间段组成,每个时间段又由时间份额(TQ)组成。每个时间份额的长度取决于振荡器周期TOSC,通常TQ为两个振荡器周期。标称位时间由互不重叠的时间段组成。对MCP2515位时间各时间段的编程设定必须满足以下要求,否则CAN通信易出故障。
根据硬件上选用的8 MHz振荡器频率和CAN总线的波特率,遵照上面对时间段的编程要求,设置相位缓冲段PS1为7TQ,相位缓冲段PS2为6TQ。相应的寄存器值为CNF1(0x01)、CNF2(0xF1)、CNF3(0x45)。在这样的配置下,MCP2515能以125 kHz的CAN波特率可靠地通信。
MCP2515函数的封装,分为SPI控制指令和自定义函数,SPI控制指令主要包括复位、读指令、写指令、读RX缓冲器、装载TX缓冲器、RTS请求发送报文指令、读状态指令、RX状态指令、位修改指令,自定义函数主要包括CANID的读取、设置,CAN 数据的发送、接收等。
4.5 抗干扰设计
考虑到设备实际工作环境中具有大型交流设备,尤其是在启停过程中会产生高频干扰,严重影响设备正常运行,为此,从以下几方面进行抗干扰设计。
电源抑制:
从降低电源辐射强度、切断干扰耦合路径及减少辐射环路面积等方面入手,采用分立电源供电、电源输出端滤波、合理接地等方式来实现。
电缆辐射抑制:
1)控制电缆长度,在满足使用要求的前提下,使用尽量短的电缆,但是当电缆的长度不能减小到最高辐射频率波长的一半以下时,减小电缆长度没有明显效果;
2)在电缆上使用适当的共模扼流圈,最简单的方法是套一个铁氧体磁环;
3)布线路板时,使周期性信号远离I/O接口电路,并将I/O接口电路部分的地线与线路板上的其他地线隔离开,仅在一点连接;
4)I/O接口电路部分的地线与金属机箱之间做射频搭接;
5)对机箱内的I/O电缆(从线路板到连接器的部分)进行屏蔽;
6)使机箱内的I/O电缆(从线路板到连接器的部分)长度尽量短;
7)使用共模低通滤波器,最好是安装面板上的形式(例如滤波连接器);
8)使用屏蔽电缆,但要注意电缆屏蔽层的端接方法和端接位置,端接得不好可能会增加电缆的辐射;
9)使用平衡电路。
接地设计:
避免地环路干扰,这是一种较常见的干扰现象,常常发生在通过较长电缆连接的相距较远的设备之间。其产生的内在原因是设备之间的地线电位差。地线电压导致地环路电流,由于电路的非平衡性,地环路电流导致对电路造成影响的差模干扰电压。
实际施工中可采用单点接地、多点接地和混合接地等方式。
5 试验
水下电视检测系统最重要的4个技术指标为:耐辐射性、水密性、运动性能及检测灵敏度,与这4个技术指标关系最紧密是水下机器人部分。因此试验的目的即主要是针对水下机器人的上述4个指标进行试验,验证水下电视检测系统的整体性能。
(1)耐辐射性试验
耐辐射性试验对水下电视检测系统中的材料进行了伽马射线源辐照,辐照放射源为钴-60伽马射线源,辐照剂量率为5×104rad/h。辐照的材料包括密封圈、石英玻璃片、防爆有机玻璃、插座机芯、耐辐射摄像机、304不锈钢、6061铝合金以及耐辐照电缆,见表1。辐照时间:2012年4月11日上午9点至2012年4月19日下午5点,总时间为200 h。经累积辐照时间计算,试验材料接受了约1.1×105Gy的辐照剂量。
对水下电视检测系统进行伽马射线源辐照后,材料除1根10芯插头插座机芯有点变色外,其他材料无任何物理或电气变化,证明水下电视检测系统耐辐照性达到技术指标要求。
(2)水密性试验
水密性试验用密封容器为不锈钢制圆柱筒,内径为φ400 mm,高为600 mm。密封容器盖与容器之间由密封圈和螺丝密封。密封容器上装有压力表,量程为0.6 MPa,精度为2.5级。
将水下电视检测系统的水下机器人放入密封容器中,向密封容器注水,当压力表指示0.25 MPa时停止注水,进行保压,保压时间为1 h。
在密封容器中对水下电视检测系统的水下机器人部分进行加压保压后,将水下机器人取出进行观察,为发现玻璃上是否有水雾产生。通电后,系统运行良好,未发现系统有电气故障产生,证明水下电视检测系统水密性达到技术指标要求。
(3)运动性能试验
运动性能试验在游泳池中进行。将水下电视检测系统的水下机器人放入游泳池中,通过控制系统对其进行水下操作。
在水下机器人放入游泳池中,控制垂推进器摇杆向上,测试水下机器人上升功能;控制垂推进器摇杆向下,测试水下机器人下降功能。
控制主推进器摇杆向上,测试水下机器人后退功能;控制主推进器摇杆向下,测试水下机器人前进功能;控制主推进器向左和向右,测试水下机器人转弯功能。
水下电视检测系统控制部分的主推进摇杆和垂推进摇杆均可3级调速,分别为慢速、中速和快速。在进行运动性能试验时,首先测试了水下机器人的前进、后退功能,均能达到技术条件要求。对水下机器人进行转弯试验,在特制容器中,水下机器人能够实现在容器中原地转弯,未碰到容器壁,满足技术条件要求。
在对水下机器人进行悬浮试验时,发现主推进摇杆和垂推进摇杆处于快速和中速两级时,水下机器人会出现不能在水中悬浮的情况,同时由于水波的干扰,水下机器人不能保持稳定。当主推进摇杆和垂推进摇杆处于慢速一级时,通过操作人员的调整,水下机器人在水中一定深度范围内能够实现相对静止悬浮,可以认为达到技术指标要求。
(4)检测灵敏度试验
使用水下电视检测系统在不同的距离对灰度卡进行观察,选取的距离为10 mm、3 m、5 m、8 m。通过控制系统对摄像机进行调焦,在显示器上观察灰度卡上直径为0.8 mm黑线的清晰度,测试水下电视检测系统的检测灵敏度。
在10 mm、3 m、5 m、8 m四种距离对灰度卡进行观察,通过对摄像机焦距的调整,能够在显示器上清楚的观察到灰度卡上直径为0.8 mm的黑线,证明水下视频检测系统的检测灵敏度达到技术条件要求。
6 结论
本研究针对反应堆压力容器在役检查进行目视检查时无法进行人工检查的问题,提出了一种小型高耐辐射水下观测机器人系统设计的方案,并重点解决了动密封选用、推进器的选配、远程遥控及耐辐射性等问题。以低功耗的MSP 430系列单片机作为处理器实现了对水下机器人的运动及功能控制,经过实验验证了各项性能,设计方法可行。结果表明该系统控制精度高,功耗低,实时性好,具有很强的抗干扰能力,能有效地用于反应堆压力容器在役检查的目视检测。
猜你喜欢
中国核电(2022年3期)2022-09-17
阅读(科学探秘)(2022年6期)2022-06-23
军事文摘(2021年16期)2021-11-28
建材发展导向(2021年20期)2021-11-20
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
动漫界·幼教365(大班)(2019年10期)2019-10-28
科学与财富(2018年35期)2018-01-15
作文·初中版(2017年11期)2017-09-14
领导决策信息(2017年12期)2017-05-17
世界博览(2017年1期)2017-04-19
