
无人船在水下地形测量中的应用
2021-06-03 14:35秦亮亮
科技创新与应用 2021年15期
秦亮亮
(91550 部队,辽宁 大连 116023)
我国幅员辽阔、山川河流众多,仅流域面积就已经超过1000km2,随着国家对水下地形地貌调查进程的加快,对于湖泊乃至近海水域的水下地形测量调查工作要求也在不断提升。长期以来,我国的水下地形测量工作停留在人工测量阶段,有关水下地形测量的技术手段较为落后,因此开展无人船水下地形测量优势极为明显。近几年来,为了获得水下地形信息数据,无人船测量系统通过搭载GNSS-RTK 设备、单波束测深仪等数据采集设备进行水下地形数据测量,可有效满足传统测量模式中人工测量技术无法达到的工程任务要求,可有效解决传统测量模式中所受到的地形环境因素制约,让水下地形测量人员获得高精度的数据信息,为水下3D 模型的建立奠定坚实基础。
1 无人船
1.1 无人船应用特点
无人船作为进行水下地形测量数据获取的重要路径,现阶段已代替了大部分的传统人工测量作业方式。自我国应用无人船技术以来,经由多年的技术创新发展,无人船的水下地形测量技术已趋近于成熟,而无人船的水下航行表现也趋于稳定。现阶段的无人船发展方向为智能化。在水下地形测量中无人船技术应用的最大优势就是高效、安全、轻便及小巧,再加上无人船测量运行成本低的应用优势,让无人船测量技术深受测绘单位的喜爱。无人船测量技术的远程遥控系统,以及自动驾驶系统完全杜绝了水下地形测量过程中发生的人员伤亡事故,无人船机体的特殊设计能够抵御外力的攻击,确保无人船能够最大程度的保存完好。此外无人船能够搭载我国最为先进的通信系统、传感器系统及导航控制系统,避免无人船在水下测量过程中出现被水草或是渔网缠绕,同时也能帮助测量单位对无人船进行维护检查。与此同时,无人船所搭载的深测仪、ADCP、侧扫声呐等多种类型的传感系统,能够帮助测量单位全面测量水库、湖泊及内河航道等区域,实现对地下水域地形地貌数据的有效获取。
1.2 无人船测量系统
无人船的水下地形地貌测量效率极高,再加上无人船测量系统具备测量数据准确,以及测量安全系数高的特征,因此在湖泊和水库上无人船机芯常常能够进行水下地形测量工作。现阶段大多数的无人船已经实现了自主导航、自动避障和数据实时传输的功能特征。
根据无人测量船的功能特点,可将系统分为两个系统,分别是控制系统及测量系统。控制系统是对无人船运行状况、航行情况及测量数值等相关数据信息的精度值进行把控,利用岸边基站的控制系统对水深信息、水流速度信息和船体的位置信息进行全面性把控。测量系统主要是由GNSS-RTK 及测深仪器构成,同时利用姿态传感器对测量数据信息实时进行纠正,确保系统获得的水下三维坐标的准确性,为水下地形图绘制及三维模型的生成提供准确性基础数据。无人船在进行自动导航测量过程中,可将测量过程中测区的影像资料导入无人船的控制软件系统中,对无人船的航线进行再次规划,与此同时GNSS-RTK 在无人船测量中又能起到导航的作用(见图1)。
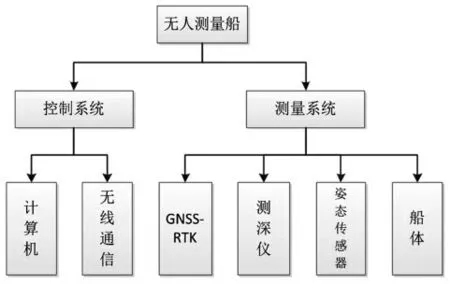
图1 无人船测量系统构成
1.3 无人船测量系统原理
无人船测量系统中的测深仪在充分结合GNSS、潮位及声速信息的前提下,能够对测量位置的水深及水底高度进行测量,因此无人船广泛适用于影响测量人员生命健康安全的情况中,同时需要经常更换测量区域的环境。同时无人船测量系统所搭载的GNSS 全球定位系统,能够在测量过程中为测量人员提供高精准的定位坐标,同时利用GNSS 定位系统还能进行自主导航,帮助无人船实现智能化的无人操作(见图2)。
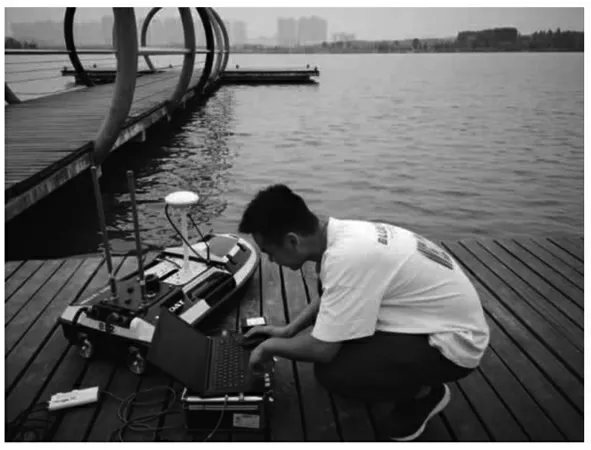
图2 无人船测量系统
无人船测深系统的工作原理,是经由无人船的船底声呐装置进行声波的发生,等待声波达到介质的表面反射时,经由测量系统计算发射反射波,以及接受反射波之间的时间差(Δt),利用声波在水中的传播速度(V),利用无人船自带的微型处理器进行测点水深(h)的计算。具体公式如下:

无人船测水底高程的工作原理为,将GNSS 天线中的相位中心高程设置为H,GNSS 天线相位中心到无人船吃水高度的距离设置为h0,将无人船的船体丝带设置为Δh,无人船测量系统中测深仪所测量的水深为h,水底高程则是D,测量水底高程的具体公式如下:

无人船测量系统的运转是基于GNSS-RTK 动态定位技术,同无人船测量系统运行过程中利用姿态传感器对船体的姿态信息修正,继而实现对无人船三维坐标的实时修正。避免无人船测量过程中由于船体的晃动,导致无人船水下地形测量数据失真,确保水下地形测量成果的精确度。
2 无人船在水下地形测量中的实例分析
2.1 案例概述
河道测量的面积为5.1km2,因此选用无人船参数如为尺寸是105cm×35cm×35cm、重量为25kg,续航能力在6h。
2.1.1 无人船的测试控制环节
第一,在无人船测量测绘的测试环节中,测试当天的天气良好,水面并无风浪因此适宜开展水下测量工作。第二,无人船测量测绘过程中需要与水流方向保持一致,确保无人船与断面的间距在20m。第三,无人船测量测绘过程需要保证无人船始终处于匀速行驶的状态,同时需要将船体转角变化控制在400/min 以下,将无人船的实际航向与测量间距的差异控制20%以下。
2.1.2 无人船的测试操作环节
第一,无人船测量测绘开展前需要测量单位先对无人船及相关测量设备进行检测、调试,确保无人船测量测绘过程中测量设备的应用参数满足测量需求。第二,无人船测量测绘过程中需要将测线间距设置为10cm 处,并利用计算机及相关测量辅助设备进行连接测量,确保水下地形地貌实际数据信息的精准获得。第三,无人船测量测绘操作过程中,测量单位需要对相关的模拟信息进行记录保存。
2.2 数据分析测绘环节
无人船测量测绘工作完成后,测量单位的工作人员需要对相关数据信息进行整理分析,并以此为基础对测量河道的水下地形情况进行测绘。本次测量工作选用的测绘软件为南方Cass9.1,借助测绘软件对无人船测量测绘的回传数据进行分析。其中河道的等深线距离为0.5m,所采用60cm×60cm 标准,一共180 副。无人船测量测绘数据分析环节以《水运工程测量规范》为基础,利用1:1000 与1:2000 的测量图式,同时利用word 进行测绘报告的编辑工作。
2.3 无人船测量数据精度检查环节
为了保证无人船测量数据信息的精准性,测量单位需要对测量河道进行抽检工作,实现无人船测量数据获得的可靠性。抽检选取的河道长度为测量整体长度的7%,将所有测试点的高程差值控制在0.2m 以内的抽检河道区域设置100 个随机测试点。其中,对于高度距离差在0.1m 以内的抽检河道设置48 个随机测试点,在0.1m-0.2m 之间的设置49 个随机测试点,对于高度距离差为0.2m 的抽检河道区域设置3 个随机测试点。
本次测量河道抽检工作严格按照《水运工程测量规范》进行抽检测量工作,所有测量工作均满足相关部门的测量数据精度检查要求,抽检合格率为100%,无人船测量数据精度检查结果具备参考使用价值。
2.4 案例实验结果
无人船测量技术在水下地形测量的应用价值意义极高,根据上述测量实例结果可知,无人船测量技术具备进一步推广的应用价值。
第一,测量单位利用无人船进行水下地形测量过程中,在对无人船测量数据信息精准性检测时,对抽检河道中设置100 个随机测试点进行测试数据信息检验工作,测量检验合格率为100%,测量精确度极高。
第二,测量人员在应用无人船测量技术过程中,在进行水下测量期间所应用的劳动力相对较少,对于无人海域、危险海域的测量探测有着极高的应用价值,既能保证测量数据信息获取的精准性,同时也能保证测量人员的生命财产安全,为相关部门水下地形情况的获取提供完整信息,有效避免了自然灾害的发生。
3 无人船在水下地形测量中应用的推广路径
无人船测量技术的测量作业主要是由计算机控制执行,因此在作业过程中能够严格执行程序设定,大大提升无人船测量数据的精准性。再加上无人船船体本身轻便短小,对于航向的控制力极佳,因此能够大大提升水下地形测量的准确度。为此相关部门需要加大对于无人船水下测量优势的宣传力度,提高各个区域测量单位对于无人船水下地形测量技术的重视程度,为无人船测量技术的广泛应用发展创造条件,同时相关部门在推广宣传过程中,需加深测量人员对于无人船水下地形测量技术的理解程度,提升测量人员的测量技术水平,为无人船水下地形测量技术的推广应用奠定基础。此外为了加快我国无人船水下地形测量技术的发展,各大高校需注重培养无人船水下测量人才,着重加强现有的水下地形测量技术人员的技能培训工作,培养其无人船水下地形测量专业技能,同时参与无人船水下地形测量作业的工作人员需要做好经验总结工作,分析自身存在的不足,全面提升测量人员的水下地形测量能力。
4 结束语
传统水下地形测绘过程中,需要耗费大量的人力、物力,水下地形测量所应用到的测量设备复杂、笨重,严重影响了水下地形测量的效率及测量数据的精准性。近年来我国由于水下地形测量不准确而造成的抛石量发生重大变化,造成相关部门出现严重经济损失。无人船水下地形测量技术的出现具备极高的经济价值,不仅能够减少人力、物力上的资金投入,大大降低运作成本,同时也能有效解决传统人工测量面临的难题,因此相关部门需注重应用无人船水下地形测量技术,为水下地形测量精准度的提升保驾护航。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
建材发展导向(2021年22期)2022-01-18
资源信息与工程(2021年5期)2022-01-15
军民两用技术与产品(2021年2期)2021-04-13
建材发展导向(2019年10期)2019-08-24
小哥白尼·趣味科学画报(2019年12期)2019-02-28
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
岷峨诗稿(2017年4期)2017-04-20
科学大众(中学)(2016年8期)2016-05-14
