基于CNN-SVM的地下目标形状识别
2021-06-02 10:06:18张天助周辉林
南昌大学学报(理科版) 2021年1期
张天助,周辉林,杨 仙
(1.景德镇陶瓷大学机械电子工程学院;2.南昌大学信息工程学院,江西 南昌 330031)
探地雷达(ground penetrating radar,GPR)是一种利用地下介质的不连续性对地下目标探测的有效工具[1]。由于GPR具有探测速度快、探测过程连续、操作灵活方便、分辨率高、不破坏被探测目标等特点,广泛应用于军事和民用领域。探地雷达主要应用于以下四个方向:(1)地下目标定位;(2)地下目标的尺寸估计;(3)地下目标参数估计;(4)地下目标识别。本文就地下目标形状识别进行研究。
一般来说,地下目标的电性能参数、位置以及形状的估计涉及的算法目前可分为两大类:基于物理模型方法和基于传统人工设计特征提取的方法。基于物理模型方法中,采用线性逆散射方法设计测量参数成像来估计目标位置[2-3],同时需要其他算法辅助完成;对地下目标的形状、电性能参数、大小的估计,通常使用合成孔径雷达成像方法、时域反射以及非线性逆散射方法[4-7],不足之处为涉及的算法复杂度高、计算代价较大。在传统目标分类方法中,一般将人工设计的特征提取算法和分类器结合,从而实现对地下目标的检测和分类。传统的人工设计的特征提取方法需要相关研究领域的知识为前提,并且耗时长、提取的特征不具有很好的描述性[8]。目前,随着人工智能的迅速发展,深度学习算法中的卷积神经网络成为计算机视觉中最常用的自动特征提取算法[9]。CNN直接输入图像数据,在特征提取中不需要过多的人工干预,避免了复杂的人工设计的特征提取过程,同时CNN也广泛应用于医学图像识别[10]、人脸识别[11]等领域。但CNN中的Softmax分类器不能很好的处理非线性输出问题。鉴于此,本文提出了基于CNN-SVM的地下目标形状识别算法。
本文的主要工作是将CNN-SVM算法应用于地下目标识别领域,减少复杂的人工特征提取操作,为了提高CNN提取的特征可分性,本文使用支持向量机代替CNN中的Softmax分类器,在地表面光滑和粗糙两种情况下对地下目标形状识别,实验结果表明,相比于原始CNN分类算法和传统人工设计的特征提取分类算法,CNN-SVM方法具有更好地下目标形状识别效果。
1 数据预处理
由于GPR图像双曲线受发射波形、极化方式、背景介质、埋藏深度、目标的形状和电性能参数的影响,对于探地雷达图像的特征提取较为复杂,为了更好的评估CNN-SVM对地下目标形状分类性能,通过预处理提取地下圆形和矩形目标的GPR图像的感兴趣区域(Region of interest,ROI),首先通过方差变化和能量分布确定地下圆形和矩形目标位置,然后再去除地下背景数据留下地下目标信息,最后再计算处理后的数据矩阵行和列的能量,进而确定目标的大致区域。能量扫描按式(1)计算:
(1)
式中:xn(i)是第道n数据,M是总的数据道数,En是第n道数据的能量。
然后去除背景数据,并计算目标的行列方向的能量分布。通过选取能量阈值来确定目标位置,将大于阈值的位置保留,反之去除。阈值选取标准按式(2)选取
(2)

2 GPR模型及CNN-SVM框架
2.1 GPR模型
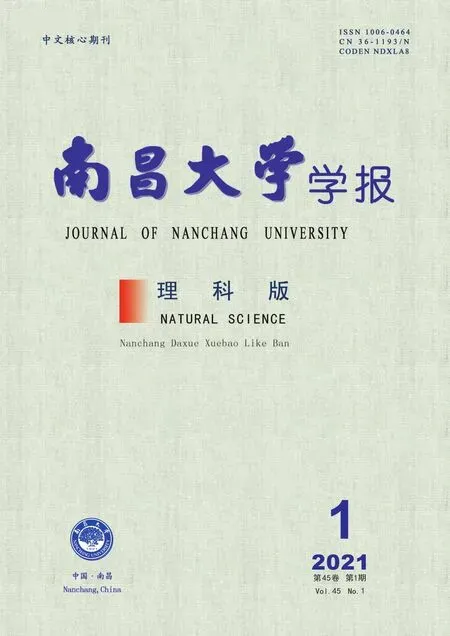
探地雷达由雷达主机、发射天线和接收天线组成。通过移动探地雷达天线获取地下目标的GPR图像数据,其中探地雷达的工作原理如图1。
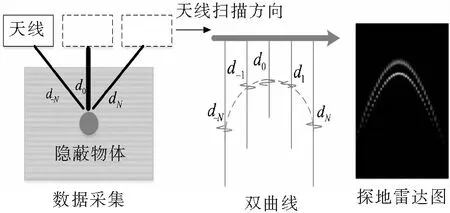
图1 探地雷达工作原理图
2.2 卷积神经网络
卷积神经网络主要由输入层、卷积层、非线性激活函数层、池化层和softmax分类输出层组成。卷积神经网络的输入层一般为二维的图像数据,使用已经设定好的卷积核对输入图像通过卷积学习特征,池化层利用图像局部相关性对图像进行下采样,这样既可以大幅度减少网络的数据处理量,同时又保留了特征的有用信息。Softmax将学习到的特征映射到所属的类。
为了更清楚的理解卷积层和池化层的操作,假设输入数据集图像像素大小为m×n,卷积核大小为m×n,步长设为1,外加入偏置项,则经过卷积层输出的特征图大小为(m-p+1)×(n-q+1),卷积层的输出一般为非线性激活函数输入,非线性激活函数的输出为池化层的输入,池化层输出特征图数和卷积层相同,池化操作就是提取特征图局部的均值或最大值。则第l个卷积层的第j个特征图上的神经元经过激活函数的输出为:
(3)
K(x)=max(0,x)
(4)

2.3 CNN-SVM框架
在CNN中使用Softmax作为网络的分类器。该分类器以全连接为桥梁将CNN提取的特征映射为所属类别输出。Softmax分类器在网络训练时可以与网络的后向传播有效的结合,便于CNN模型中的权值更新,但当分类问题偏非线性时,Softmax不能够很好的分类。
SVM利用自身的核函数将原始的特征空间中非线性分类界面映射到高维度的特征变换空间中,接着会产生线性分类界面,最后得到良好的分类效果。为了解决Softmax不能够很好处理非线性问题,鉴于SVM对非线性分类问题表现良好。本文使用SVM代替Softmax作为CNN的模型分类器,并且对CNN提取的地下圆形和矩形目标特征进行分类。
本文在地表面光滑和粗糙两种场景下,使用CNN-SVM算法对地下圆形和矩形目标识别,具体步骤为:(1)预处理,提取GPR图像的感兴趣区域,主要提取图像的双曲线部分;(2)利用CNN学习特征;(3)将CNN学习的特征作为SVM分类器输入进行训练;(4)使用未训练的GPR图片输入训练好的CNN-SVM模型进行分类测试。本文的数据预处理和CNN-SVM算法整体流程如图2。

图2 本文CNN-SVM整体流程图

图3 本文的CNN-SVM框架
在本文中使用CNN提取特征时,输入的数据集是经过ROI预处理GPR图像,使得所有探地雷达图像输入大小均为64*64,此外,本文使用dropout断开网络中5%的网络结点以防止网络过拟合,同时在每个卷积层后面加入Batch-Normalization(BN)技术加快网络的训练速度,使用2*2的最大池化(Max-pooling)。本文CNN-SVM整体的结构为输入层Input-卷积层C1-池化层S1-卷积层C2-池化层S2-卷积层C3-池化层S3-全连接层full connected-分类层SVM,实验中SVM分类器使用线性核函数,本文使用的CNN-SVM算法的整体实现过程如下:
(1)将经过ROI预处理的探地雷达图像数据集整体处理成64*64大小作为网络的输入。
(2)第一层卷积层的卷积核维度设定为7*7,使用20个卷积核,输出20个58*58的特征图。同时在该卷积后插入BN加快网络训练速率,将第一层所有的特征图经过2*2的Max-pooling,即取局部特征图中4个像素中的最大值,输出为29*29的特征图。
(3)将S1的输出作为后面卷积层的输入,第二层卷积核大小为10*10,经过卷积后输出60个20*20的特征图,将C2的特征图同上述中操作,得S2层的特征图为10*10。
(4)将S2的特征图作为第三层卷积层的输入,第三层卷积核大小为5*5,输出100个特征图,C3特征图为6*6。最大池化后的特征图为3*3。
(5)最后将全连接的500张1*1的特征图与SVM相连,全连接的输出为1*1*500。
若训练集数为{1,2,3……m},测试集数为{1,2,3……n},则此时SVM特征的的训练集输入维度为500×m,测试集m输入维度为500×n,最后得目标识别结果。
本文的CNN-SVM框架结果如图3,实现细节如表1。
3 数据集仿真
本文使用电磁仿真软件gprMax分别仿真地表面在光滑和粗糙情况下,地下圆形和矩形目标在不同介电常数、不同深度、不同大小情况下的探地雷达图像,并使用仿真得到的探地雷达图像进行实验。
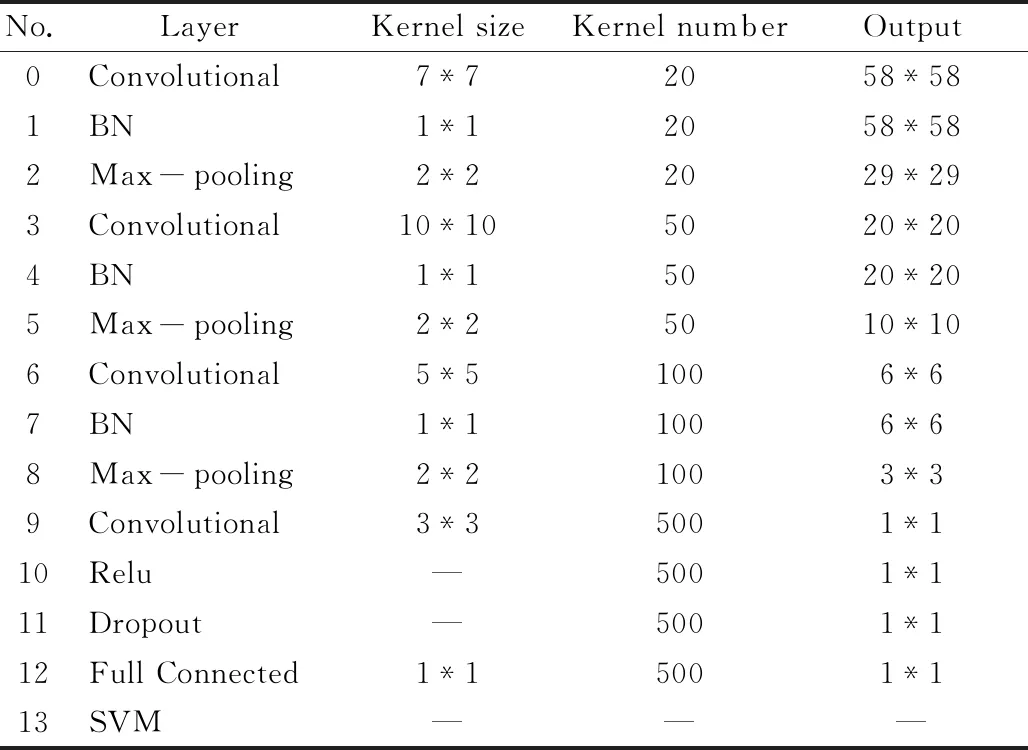
表1 CNN-SVM实现细节
在地表面光滑GPR数据仿真中,发射波形与天线参数设置如下:(1)天线发射信号波形为中心频率为900 MHz的ricker波;(2)发射天线和接收天线的距离d为0.15λ(λ为电磁波波长);(3)探地雷达距地面的高度0.06λ;(4)两个相邻收发一体的天线的距离为0.05 m;(5)时窗为25 ns。
地下圆形和矩形目标特性设置为:(1)背景的介电常数为设为5,电导率为0.005 S·m-1;(2)地下场景的维度固定为4.2×4.2 m;(3)圆形目标(埋藏深度[1.7 2.4]m),半径范围[0.1 0.28]m,介电常数εr∈[14.0 28.0],电导率为0.005 S·m-1);(4)矩形目标(埋藏深度[1.7 2.4]m),大小范围:长[0.1 1.0]m,宽[0.1 1.0]m,介电常数设置为εr[14.0 28.0],电导率为0.005 S·m-1)。
在地表面粗糙情况下,地表面粗糙度系数设置为0.4~0.6,发射天线、接受天线的参数设置以及地下目标参数的设置和光滑地面所设置的相同。
地表光滑情况下,仿真得到500组探地雷达图像,圆形和矩形目标各250组。在地表粗糙情况下,仿真得到400组粗糙面探地雷达图像,圆形和矩形目标各200组。部分仿真的GPR图像如图4所示。

图4 部分仿真GPR图像数据
4 实验结果与分析
4.1 实验数据集
为了验证本文CNN-SVM方法对地下圆形和矩形目标的识别的有效性,使用仿真的地下目标探地雷达图像数据集进行实验,本文在地表面光滑和粗糙两种情况下对地下圆形和矩形目标识别实验,首先在地表面光滑情况下,使用仿真的500组数据,80%作为训练,20%作为测试。在地表面粗糙的场景下,同样使用相同的训练和测试策略。输入均为64*64的RGB探地雷达图像。
4.2 分类评价指标
在本实验中,使用二分类问题常用的评价标准对分类模型进行评测,分别为准确率(accuracy)、精度(precision)和召回率(recall),计算公式为:
假设TP是目前类别为阳性且被预测为阳性的数量,FP是目前类别为阴性且被预测为阳性的数量,TN是目前类别为阴性且被预测为阴性的数量,FN是目前类别为阳性且被预测为阴性的数量,P为属于该类别的总类别数。
4.2 光滑面地下目标形状识
实验中,为了将CNN-SVM地下目标形状识别结果与传统人工设计的特征的识别结果进行比较,由于HOG特征是目前最具描述力的特征之一,在光滑地表面情况下,提取地下目标探地雷达图像的HOG特征,再使用SVM对地下目标形状的HOG特征进行分类,实验中使用400光滑地表面探地雷达图像作为训练,100组做测试。
在CNN-SVM实验中,首先搭建CNN对探地雷达图像训练和特征学习,搭建好CNN模型之后,CNN的参数设置如下:学习率设为0.003,网络训练迭代次数为200,Batch Size为320。在训练好CNN之后,使用SVM代替CNN中softmax分类层,将CNN中全连接的的特征输入SVM进行特征训练以及地下目标形状识别。由于实验中CNN全连接层输出的特征维度为500个1*1的特征,因此,将实验中400组训练集探地雷达图像经过CNN后转化为400*500的特征用于SVM训练,100组测试集转化为100*500的特征用于SVM测试。
实验中CNN训练200次得200个网络模型,将每个网络训练模型中的softmax分类层更换为SVM分类层,最后所得CNN-SVM的误差曲线与原始CNN误差曲线如图6,同时比较实验中CNN学习特征和传统HOG特征的区别如图5,可见,与提取的HOG特征相比,CNN学习的特征更具有更好的泛化力,分别计算CNN-SVM对测试集分类所得到的准确率(accuracy)、精度(precision)和召回率(recall),并且与CNN、HOG-SVM算法对比,实验结果如表2所示,得到ROC曲线如图7。

图5 CNN提取的特征与HOG特征
Epoch

False positive rate
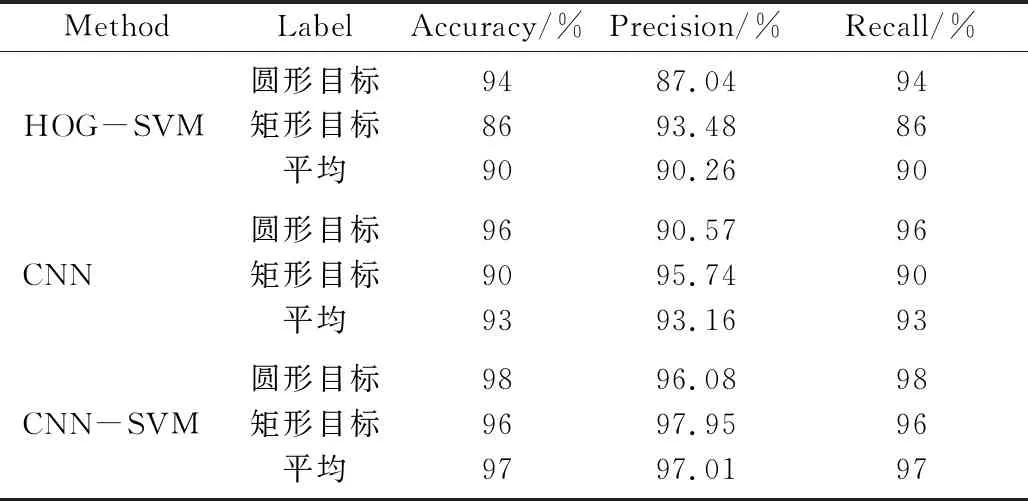
表2 光滑地表面目标识别结果
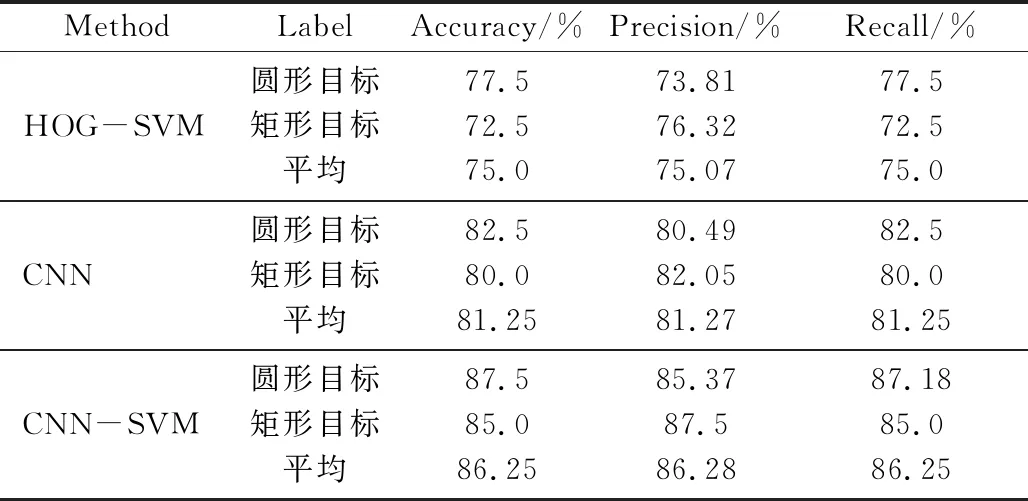
表3 粗糙地表面目标识别结果
根据上述实验结果,可以看出本文的CNN-SVM算法对于地下目标形状识别结果明显优于HOG-SVM和CNN算法,由图3,CNN-SVM方法收敛更快,训练误差更小。
4.3 粗糙面地下目标形状识别
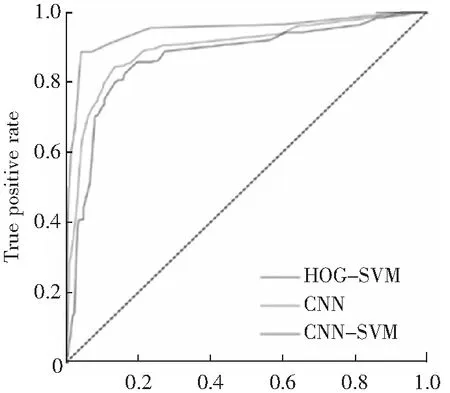
在粗糙地表面情况下,对地下目标形状分类实验中,使用的CNN-SVM框架和光滑地表面的相同,粗糙地表面情况下,使用400组粗糙面地下目标探地雷达图像进行实验,其中320作为训练,80组作为测试。CNN网络参数将Batchsize改为300,最后所得分类结果如表3,ROC曲线如图7。
由于仿真数据在地表面粗糙情况下和实际情况更接近,用于训练和测试的探地雷达图像中存在的干扰较多,但是根据表3,CNN-SVM算法仍有相对较高的地下圆形和矩形目标的分类结果。根据图8 ROC曲线可以看出,CNN-SVM方法分类性能优于CNN和HOG-SVM算法。
False positive rate
5 结语
对于传统地下目标识别方法存在的问题,本文提出基于CNN-SVM地下目标形状识别方法。通过该算法解决传统特征提取和CNN分类器中存在的问题,使用支持向量机代替CNN中Softmax分类器。利用光滑和粗糙地表面的探地雷达图像数据集对该方法进行验证,实验结果表明,在不需要人工提取特征的情况下,该方法对地表面光滑的地下目标形状识别实验中,达到了97%的平均识别率,在地表面粗糙情况下,对地下目标识别实验中,该方法对地下目标的识别率仍高于传统分类算法,因此,该方法在探地雷达目标识别领域具有一定的应用价值。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
科技研究·理论版(2021年20期)2021-04-20 01:42:52
雷达学报(2021年1期)2021-03-04 13:46:10
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
通信电源技术(2018年3期)2018-06-26 08:07:02
电子测试(2018年1期)2018-04-18 11:52:35
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34