
轴向磁通电机控制方法综述
2021-06-02 01:53潘忠亮赵慧超暴杰李帅
汽车文摘 2021年6期
潘忠亮 赵慧超 暴杰 李帅
(1.中国第一汽车股份有限公司新能源开发院,长春130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春130013)
主题词:轴向磁通 控制 数学模型 非数学模型 电机 电动汽车
缩略语

AFFSPM Axial Field Flux-Switching Permanent Magnet FOC Field Orient Control DTC Direct Torque Control MTPC Model Direct Torque Control MTPA Most Torque Per Ampere PID Proportional Integral Derivative CVC Complete Vehicle Control SVPWM Space Vector Pulse Width Modulation HEAFFSPM Hybrid Excited Axial Field
Flux-Switching Permanent Magnet CHBPWM Current Hysteresis Band Pulse Width Modulation ASR Automatic Speed Regulator
1 前言
AFFSPMM因高比功率和高转矩密度的优点[1-2],目前已广泛应用于家电、汽车和航天等领域。根据定转子数量、定转子相对位置和主磁路不同,可分为单定子单转子结构、双定子单转子kaman结构、单定子双转子Torus-NN结构、单定子双转子Torus-NS结构和多盘式结构5类[3-4]。尽管AFFSPM电磁力作用方式不同于径向磁通电机电磁力,但AFFSPM的数学模型和数学方程与径向磁通电机相同[5-6],所以AFFSPM与径向磁通电机控制方法相近。根据电磁力作用方式的不同,本文将AFFSPM控制方法分为基于AFFSPM数学模型的控制方法和不基于AFFSPM数学模型的控制方法进行阐述。在基于AFFSPM数学模型中,应用转子磁场定向矢量控制(Field Orient Control,FOC)方案、单位功率因数控制方案、模糊自适应PID控制方案和电机效率优化控制方案达到相应的控制效果。在不依靠轴向磁通电机数学模型的控制方法中,介绍了AFFSPM的传统控制方案、直接转矩控制(Direct Torque Control,DTC)方案和模型预测转矩控制(Model Direct Torque Control,MTPC)方案。
2 基于AFFSPM数学模型的控制方法
基于AFFSPM数学模型的控制方法即应用坐标变换实现FOC控制方法,达到定子电流转矩分量和磁链分量的解耦控制,将交流电机转化为直流电机控制,实现大转矩、高转速且高控制精度[7]。
2.1 FOC方案
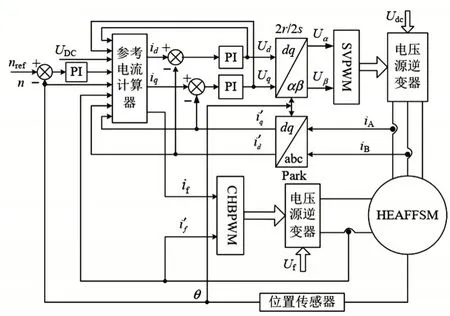
图1 混合励磁轴向磁场磁通切换电机控制[8]

图2 AFFSPM电感补偿控制[7]
基于AFFSPM电机数学模型,文献[8],赵纪龙,林明耀,徐妲等将其工作区域分为低速区和高速区,进而分析AFFSPM在整个运行区域的运行特性[8]。图1为混合励磁轴向磁场磁通切换电机控制框图,在电流区,保证d轴电流为0不变,将q轴电流赋值进行控制。在电压区,以电压幅值与直流母线电容电压差值为依据,判断进退弱磁的控制时刻,实现了弱磁控制。该弱磁控制策略可提高直流母线电压利用率,增大电机转速工作区间,相同转速条件下输出转矩能力更强。在电流区采用最大转矩电流比(Most Torque Per Ampere,MTPA)控制策略,并与d轴电流为0的控制方式进行比较。图2为轴向磁通电机电感补偿控制框图。在电压区,基于电感补偿且保持q轴反电势不变的弱磁控制方案,并与常规弱磁控制进行了对比。试验结果表明,MTPA控制可以减小电机铜耗,提高了电机系统效率。基于电感补偿的弱磁控制可增大电机在电压区工作的转速范围。不同负载工况下调节不同功率因数,验证算法的有效性,提高了电机输出性能[9]。
2.2 单位功率因数控制方案
为提高AFFSPM系统的有功功率,解决AFFSPM最大转矩电流比(MTPA)控制功率因数低的问题,主要可从提高功率因数为目标[10]。图3为AFFSPM功率因数控制框图,在满足轴向AFFSPM转速和转矩要求的前提下,采用单位功率因数(cos=1)控制方案,将目标转速和反馈转速进行PID控制,输出值与直流母线电压、反馈转速共同作为功率因数控制器的输入,输出为目标d、q轴电流。结果表明单位功率因数控制方案可将AFFSPM电机的功率因数提高到所需范围,弥补MTPA控制下有功功率低的缺点[11]。同样AFFSPM也适合用于电动汽车与风力发电系统。

图3 AFFSPM功率因数控制[10]
2.3 模糊自适应PID控制方案
模糊自适应PID控制是指具有自适应学习算法的模糊逻辑系统,是指靠数据来调节模糊系统的参数[12-13]。单个自适应模糊控制器可由单一的自适应模糊系统构成,也可由若干自适应模糊系统构成[14]。与传统的自适应控制相比,模糊自适应控制的优点在于它可识别系统提供的模糊性语言,而传统的自适应控制则不能。此方案对高度不确定因素的系统尤其关键[15],针对AFFSPM采用模糊器和解模糊器的控制算法,如图4为模糊自适应PID的AFFSPM电机CVC框图。根据实际系统反馈转速与理想转速之间的偏差,设计模糊控制器参数,将模糊控制器应用在转速环调节至q轴电流闭环中。此架构可满足AFFSPM转速突变时控制系统的稳定性[16]。

图4 模糊自适应PID的AFFSPM电机CVC框图[16]
2.4 电机效率优化控制方案
电机效率优化控制是指应用数学方式优化电机损耗,目前应用广泛的是拉格朗日乘数法求多元函数极值[17-19]。文献[20],景梦蝶将变量与约束条件的最优问题转换为方程组极值问题,其变量不受任何约束。然后,将扩展拉格朗日乘子法计算电机在工作区域的铜耗最小值,基于总损耗的效率优化控制方法,构建HEAFFSPM电机驱动控制系统。基于轴向磁通电机励磁理论,如图5所示[20]。d、q轴参考电流计算模块同时考虑电机铜耗与铁耗的效率优化控制策略,即在电机整个运行区域内,不同运行工况下,通过优化id、iq和if,保证总的损耗最小,最终实现控制系统的最小损耗运行,提高电机帯负载能力,增大电机恒功率转速运行范围,提高系统运行效率[20]。
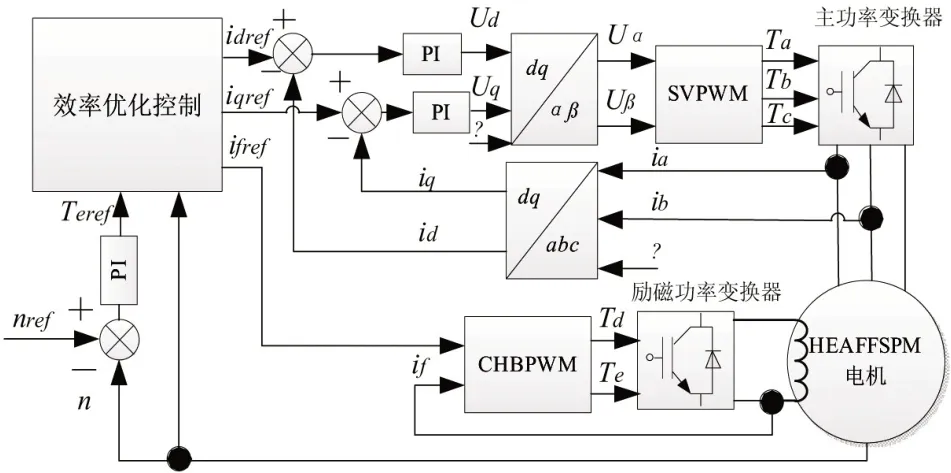
图5 电机效率优化控制系统框图[20]
3 非AFFSPM数学模型的控制方式
非AFFSPM数学模型的控制方式结构简单,运行速度较快。相比基于AFFSPM电机数学模型的控制方式而言,具有占用系统负载率较低的优点,但也存在转矩输出波动不平稳和电流较大的情况。主要以传统斩波控制方案、DTC方案和MTPC方案这3个控制方案进行介绍。
3.1 传统斩波控制方案
传统斩波控制方案主要有电流斩波、电压斩波和角度位置斩波3种[21-23]。
(1)电流斩波控制
电流斩波控制为电机传统控制方式,常用于电机启动阶段或者电机转速较低时,此时反电势较小,电流变化较大,电流上升速度快,很可能破坏功率器件,为保证电流峰值在安全值范围之内[24]。控制方案的优点适用于电机在低速运行时,对电流峰值的增长起到了很好的限制作用,电机输出转矩比较平稳。
(2)电压斩波控制
电压斩波控制是固定开关的通断时间,调整斩波的占空比,从而改变相电压和相电流[25]。
(3)角度位置斩波控制
角度位置斩波控制是指在电机高速运行时,电流的上升速率较低,电流幅值与电流变化率比低速运行时小,此时可通过角度位置来控制开通关断时刻,进而改变开关的导通时间来控制电机运行。电流幅值的峰值、有效值以及电流波形与电感波形的相对位置都可以通过改变开通角和关断角来调整。
目前,在汽车电机控制器中,已经较少应用以上3种传统斩波方案。
3.2 DTC方案
通过对电机结构、参数和材料进行优化设计,文献[27]中,Malyshev,Ivanov提出了一种基于电机定子磁链跟随的控制策略。使电机在低转速和高转速都有较好的转矩表现[26-27]。文献[28]针对传统的AFFSPM存在加工困难、互感严重的问题,提出了一种定子模块式AFFSPM[28]。如图6为模块式AFFSPM电机DTC控制框图,应用磁链计算模块和转矩计算模块得到磁链估计值和转矩估计值,并分别以参考转矩和参考磁链进行闭环控制,将闭环值输出给开关状态选择模块,实现整个DTC控制的闭环[29]。同时,文献[28]中,张蔚,王文林,於锋等分析了该模块式AFFSPM电机的结构特点,推导了该电机旋转坐标系下的数学模型,并采用矢量控制对模块式AFFSPM电机的静态、动态、及低速运行等性能进行了仿真研究。仿真结果表明,相比直接转矩控制,采用矢量控制的新型定子模块式AFFSPM电机系统具有转矩脉动较小、低速性能优越的特点,更适合用在该新型电机的变频调速控制系统中。

图6 模块式AFFSPM电机DTC控制框图[28]
3.3 MTPC方案
为提高电驱动系统带故障运行性能,并降低电机铜耗,袁晓强,张蔚,於锋提出MTPC方案的电机容错控制策略[30-31]。如图7为基于MTPC的电机容错控制系统结构框图[32],在电机的结构特征和数学模型基础上,针对三相四桥臂容错逆变器拓扑,基于恒磁动势和铜耗最小原则,分别对模型预测转矩控制和直接转矩控制下的电机容错控制系统进行仿真研究。仿真结果表明,电机单相开路故障容错后,2种控制方法均可在降低铜耗的情况下维持电机转矩、磁链基本不变,保证系统稳定运行。相比于直接转矩控制,采用模型预测转矩控制的电机容错控制系统具有较小的转矩和磁链脉动,主要根据DTC在线查表的控制方式,预测每个采样周期的转矩和磁链[33],应用价值函数来选择最优电压矢量,即应用价值函数值最小对应的电压矢量来控制逆变器IGBT通断。该结构算法简单,可明显降低转矩波动和磁链波动,提高电机的响应性能,更适合用在电动汽车的电机调速控制系统中。

图7 基于MPTC的电机容错控制系统[32]
4 结论及启示
(1)针对AFFSPM电机控制方案目前主要有2大类,基于AFFSPM数学模型和非AFFSPM数学模型。
(2)基于AFFSPM数学模型需要用到坐标变换的复杂结构,占用芯片内存较多,优点在于可保证输出电流和转矩有较高的精度和较低的转矩波动,适用于对转矩输出较高的场合,比如新能源汽车电驱系统中。
(3)非AFFSPM数学模型不需依靠坐标变换的复杂结构,优点是占用芯片内存较少,只需根据电机转矩估算和磁链估算信号,与目标值进行闭环,达到控制目的。不足是电机转矩波动较大,电流波动带宽较大。适用于家用空调电器等场合。
(4)未来轴向磁通电机控制趋向于容错控制方向发展,可提高轴向磁通电机工作的稳定性和可靠性。
猜你喜欢
航空学报(2022年9期)2022-10-12
汽车实用技术(2022年15期)2022-08-19
教育周报·教研版(2022年12期)2022-05-10
科学与财富(2021年34期)2021-05-10
西部论丛(2018年12期)2018-11-28
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
中学生数理化·高一版(2017年1期)2017-04-25
中国科技纵横(2016年15期)2016-12-29
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
