
基于DenseNet的机载雷达动目标检测
2021-05-29 01:14:56李贵锋童宁宁冯为可刘成梁
空军工程大学学报 2021年2期
李贵锋, 童宁宁, 冯为可, 刘成梁
(空军工程大学防空反导学院,西安,710051)
雷达探测技术因其全天时、全天候的工作能力,已经成为探测地/海面和低空运动目标的重要手段。由于地基雷达容易受到遮蔽效应和低空盲区的影响,利用机载雷达对地/海面和低空运动目标进行探测具有显著的优势。然而,在对目标进行探测的过程中,机载雷达通常处于下视工作状态,接收到的杂波信号强度大、多普勒谱展宽并随波束入射角变化,基于传统动目标显示(moving target indication,MTI)、动目标检测(moving target detection,MTD)和空间波束形成等一维滤波技术往往无法实现对杂波的有效抑制。
为实现杂波环境下的机载雷达运动目标检测,研究者们把一维时域滤波和空域滤波推广到时域和空域联合的二维滤波,利用空时自适应处理(space time adaptive processing,STAP)方法[1],实现自适应的杂波抑制和目标检测。为减少STAP方法的运算复杂度和对独立同分布训练距离单元的需求,研究者们提出了降维、降秩和直接数据域等实用化的STAP方法[2-4]。目前,基于知识辅助、稀疏表示、频率分集阵列等技术的先进STAP方法[5-7]也相继被用于机载雷达运动目标的检测之中,一定程度上减少了杂波非均匀、距离模糊和多普勒模糊等因素带来的不利影响。
相比于上述基于二维联合滤波的STAP方法,基于模式识别的运动目标检测方法无需估计杂波协方差矩阵,能够利用少量训练距离单元构造分类识别器,处理雷达空时回波数据,进行目标检测[8-10]。文献[8]提出了一种基于学习的目标检测方法,通过构造线性分类器实现了杂波条件下的目标检测;文献[9]提出了POLY-MTI方法,构造了一种多项式分类器来进行目标检测;文献[10]提出了一种基于支持向量机的运动目标检测方法,减少了对训练距离单元的需求。然而,由于所构造的分类器结构较浅、提取特征能力较差,传统基于模式识别的运动目标检测方法在非均匀杂波环境和低信杂比的情况下,性能有待进一步提高。
近年来,以卷积神经网络为代表的深度学习技术发展迅速,为雷达目标的检测提供了新的思路。深度学习技术通过对获取的信息进行训练、归纳和学习,可以快速有效地提取深层次特征,在多个领域取得了广泛的应用[11~13]。其中,在机载雷达运动目标检测领域,文献[14]利用AlexNet构建分类器,实现了对目标的有效检测,且相比文献[8~10]方法性能更佳。但是,文献[14]所提出的方法存在着网络参数多、运算量大和检测准确率不高等问题,主要原因在于其所利用的AlexNet[15]仅基于卷积层和池化层的简单顺序连接来提取特征,特征提取效果和分类性能有待提高,影响了其在运动目标检测中的性能。
为提高AlexNet的性能,学者们提出了一系列新型的卷积神经网络,如GoogLeNet、ResNet和DenseNet等。其中,GoogLeNet采用独特的Inception结构[16],通过使用多个卷积核提取并融合不同尺度的特征信息来获到更好的表征;ResNet采用残差模块[17],更改了网络结构学习目的,从学习图像特征到学习图像与特征的残差,提高了准确率;DenseNet将卷积层之间进行稠密连接实现特征重用[18],在网络参数和计算成本更小的条件下,获得了比ResNet更优的性能。相比于AlexNet,DenseNet具有网络参数少、抗过拟合效果好等优点。因此,为了提高杂波环境下目标检测的准确度,本文基于DenseNet构建了用于机载雷达运动目标检测的分类器,直接对接收到的空时回波数据进行处理,通过分类识别进行目标检测。仿真实验验证了所提方法的有效性及优越性。
1 信号模型
机载雷达运动目标检测的几何模型如图1所示,其中,载机在高度H以速度V匀速水平飞行,雷达正侧视均匀线性阵列(uniform linear array,ULA)由N个阵元均匀排列组成,间距为d,脉冲重复间隔(pulse repetition interval,PRI)为Tr,脉冲重复频率(pulse repetition frequency,PRF)为fr=1/Tr,相干处理间隔(coherent processing interval,CPI)内共发射M个脉冲。
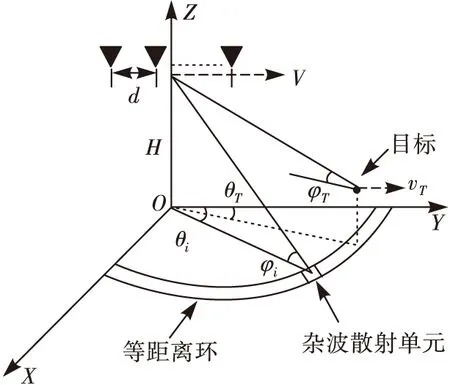
图1 机载雷达运动目标检测几何模型
不考虑干扰信号和距离模糊杂波的影响,且假设包含目标的待测距离单元中共有Nc个在方位上均匀分布的杂波单元,则雷达的第n个阵元接收到的第m个脉冲回波信号可以表示为:
(1)

对应M个脉冲和N个阵元的待测距离单元空时回波信号可以由一个大小为MN×1的向量x0表示,即:
(2)
假设各个杂波单元之间相互独立,则杂波协方差矩阵(clutter covariance matrix,CCM)表示为:
(3)
此外,假设噪声与杂波不相关,且服从均值为0、协方差矩阵为RN=σ2IMN的复高斯分布,则杂波加噪声协方差矩阵(clutter plus noise covariance matrix,CNCM)可以表示为:
RI=RC+σ2IMN
(4)
式中:σ2为噪声功率;IMN为大小为MN×MN的单元矩阵。
杂波环境下运动目标检测的目的即从式(2)中检测到目标回波信号xT,0的存在,可基于STAP方法实现。STAP通过计算回波信号向量x0的线性组合使输出信号的信杂噪比(signal to clutter plus noise ratio,SCNR)最大,而最佳加权系数w0,即空时权值矢量,可以通过最小化CNCM同时保持目标响应不变的方式进行优化求解,表示为:
(5)
式(5)的解为:
(6)
2 所提算法
2.1 算法原理
在实际应用中,待测距离单元的CNCM和目标空时导向矢量往往是未知的。对于CNCM未知的问题,若存在与待测距离单元杂波独立同分布且不包含目标的训练距离单元,则待测距离单元的CNCM可通过采样矩阵求逆(sample matrix inversion,SMI)方法估计得到,表示为:
(7)
式中:l=1,2,…,L,xl为第l个训练距离单元的回波信号向量。然而,若要求输出SCNR的损失不大于3 dB,则SMI方法至少需要L=2MN-3个独立同分布的训练距离单元来估计CNCM,这在实际非均匀杂波环境中是不现实的。

通过上述分析可知,基于STAP的运动目标检测方法可以视为一种多次二分类方法。构造二类分类器,STAP方法需要大量的独立同分布训练距离单元估计CNCM和较高的复杂度计算CNCM的逆矩阵得到空时权值矢量。针对上述问题,可直接将运动目标检测问题转化为一种多分类问题:首先,对于给定的待测距离单元回波信号向量,基于训练距离单元构建数据集,利用相应方法提取目标的特征,构造多类分类器,得到目标的多普勒频率和空间频率类别;然后,遍历所有感兴趣距离单元,得到目标的距离类别。
从另一角度看,对于具有不同多普勒频率和空间频率的目标,雷达接收到的空时回波数据本身将具有不同的特征。通过构建合适的多类分类器,可以直接提取空时回波数据的特征,并对其进行分类,输出每一类对应的概率,根据概率最大值所对应的类即可判断目标的有无及其对应的多普勒频率和空间频率。上述过程可以表示为:
p=γ(X0)
(8)
式中:X0为输入多类分类器的待测距离单元空时回波数据;γ(·)为代表多类分类器的非线性函数;p为分类器输出的概率矢量,其最大值位置对应目标所在的类。
基于上述原理和DenseNet在特征提取方面的优异性能,本文提出了基于DenseNet构造多类分类器对运动目标进行检测的方法,如图2所示。

图2 基于DenseNet的运动目标检测方法
2.2 数据集构建
对分类器进行训练以获得期望的性能需要充足的数据,本文通过使用少量训练距离单元与具有不同多普勒频率/空间频率且幅度/相位随机变化的运动目标相加的方式来构建训练数据集,具体实现方式描述如下。
对于任意待测距离单元,在其两侧各选取仅含杂波和噪声的L/2个距离单元作为训练距离单元。其中,为避免目标距离向扩展带来的不利影响,设置保护距离单元,两侧保护距离单元的个数均为Q/2。训练数据集共分为K+1类,其中,第0类表示无目标,第1~K类表示具有不同多普勒频率和空间频率的目标。当k=0时,训练数据由训练距离单元空时回波数据加上微小扰动得到;当k=1,2,…,K时,训练数据由训练距离单元空时回波数据加上建模得到的运动目标空时回波数据得到。因此,由第l个训练距离单元和第k类目标所构造的训练数据可表示为:
(9)

由式(9)可知,训练数据集的总样本数为lkp,每一类训练数据的样本数为lp。对于M×N大小的矩阵Xl,k,p,将该矩阵的实部和虚部分2个通道进行存放,得到大小为M×N×2的三维矩阵,作为分类器的输入;对于不同类别的训练数据,分别设置长度为K的标签向量y,其中,第k类训练数据所对应的标签向量yl,k,p的第k个元素值为1,其余均为0。
2.3 分类器构建
在数据集构建完成后,需要构建分类器来提取数据特征完成分类任务。DenseNet作为近年来新提出的一种卷积神经网络,能够充分利用各层提取到的特征,相比AlexNet具有更优的性能,其结构如图3所示,包括初始化层、密集连接层、过渡层和分类层等。
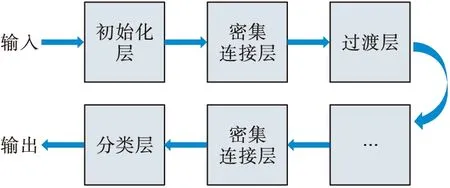
图3 Densenet结构图
初始化层对输入图片进行数据初始化,由一次卷积操作和一次池化操作组成,使输入图片的特征图大小减半、数量增多。需要注意的是,对运动目标信号进行检测时,如果空时回波数据尺寸较小,就可以选择舍弃初始化层中的池化层,避免特征图过早变小导致无法充分挖掘利用特征。
密集连接层使用多个特征图大小相同的卷积模块对输入的特征图进行深层次的特征提取。其中,卷积模块是批量归一化(batch normalization,BN)、线性整流函数(rectified linear unit,ReLU)和卷积3种操作的组合,可以看成是一个非线性转换函数κ。BN对数据进行规范化使其满足标准正态分布,同时也减少了整个训练集梯度的计算时间;ReLU取代之前的Sigmoid、Tanh等激活函数,使梯度下降和误差反向传播更加高效,也避免了梯度消失的问题;卷积操作用于对经过BN和ReLU处理过的数据进行特征提取。密集连接层将前面所有卷积模块与后面的卷积模块建立连接,保留不同层次的特征一起向后传播。第j+1个卷积模块的输入是前面j个卷积模块的输出层的并集,可以表示为cj+1=κ([c1,c2,…,cj])。值得注意的是,使用DenseNet构建分类器时要根据输入特征图的大小选择合适数量的密集连接层及每个密集连接层中的卷积模块,确保高分类精度的同时做到高效率,没有冗余。
过渡层位于2个密集连接层之间,对前面密集连接层得到的特征图进行降维处理,包括卷积操作和平均池化操作。卷积操作用于减少特征图的数量:若前一个密集连接层输出ζd个特征图,经过渡层中的卷积操作之后会生成εζd个输出特征图,其中ε表示压缩系数;平均池化操作可用于减小特征图大小。
分类层对前面学到的特征进行分类,映射到标签所在空间。首先,分类层对最后一个密集连接层得到的特征图进行全局平均池化操作,对数据进行降维来融合前面学到的特征。然后,使用Softmax函数对全局平均池化得到的结果进行归一化,得到输入数据属于每一类的概率向量。
3 仿真试验
3.1 仿真条件
本节用仿真试验来验证本文方法在机载雷达运动目标检测中的有效性,仿真参数为:载机高度H=3 km,速度V=250 m/s,ULA阵元间距d=0.25 m,相干脉冲数M=16,阵元个数N=14,脉冲重复频率fr=2 000 Hz,载波波长0.5 m。假设噪声为均值为0、方差为1的复高斯信号,NC=181个杂波单元在方位[0,π]之间均匀分布,且幅度服从复高斯分布,杂噪比设为40 dB。本文共仿真501个距离单元的空时回波数据,距离为6~31 km,其中,目标所在距离单元的距离为18.5 km,目标的归一化多普勒频率为-0.25,方位角为45°,信噪比为30 dB。

表1 训练数据集参数
本文基于DenseNet构建的多类分类器由1个初始化层、3个密集连接层、2个过渡层、1个全局平均池化层、1个全连接层和1个最终分类层组成,网络模型如图4所示,各层参数如表2所示。可知,本文所构建的多类分类器的网络参数共为55 199个,相比文献[14]基于AlexNet构建的多类分类器,参数量减少了约88%。

图4 所提分类器网络结构

表2 本文构建的多类分类器各层参数
3.2 分类器训练与测试
在训练分类器时,批尺寸和训练次数会影响到分类器最终的内部权重,进而使预测结果产生差异。因而,本文设置101和16两种尺寸和不同的训练次数,来对不同的分类器进行训练并对比最终的效果。
自适应时刻估计(adaptive moment estimation,Adam)优化器是一种有效的随机优化方法,可通过对第一和第二梯度的估计来计算不同参数的自适应性学习率,并且只需要很小的内存[19],因而能够快速收敛并找到参数更新中正确的目标方向。因此,本文选用Adam优化器对所提出的分类器进行训练。
从图5可见,本文所提出的基于DenseNet的分类器在两种不同批尺寸条件下的分类准确率均高于文献[14]所提出的基于AlexNet的分类器。

图5 不同批尺寸时分类准确率随训练次数的变化曲线
本文按照构建训练数据集的方式生成测试数据集,对分类器进行测试,各类目标数量均为100个,所得分类混淆矩阵如图6~7所示。其中,对角线上的数字表示预测值与真实值相符,即测试数据集中每类目标正确分类的数量;对角线以外的数字表示预测值与真实值不相符,即测试数据集中每类目标错误分类的数量。由图可知,在不同批尺寸的条件下,文献[14]基于AlexNet提出的分类器测试结果相差较大,随着批尺寸的下降,错误分类的数量从24降为13;而本文基于DenseNet的分类器测试结果相差较小,错误分类的数量稳定在5左右。由此可得,本文分类器错误率低,识别精度高,更加稳定。


图6 批尺寸为101时得到的分类混淆矩阵
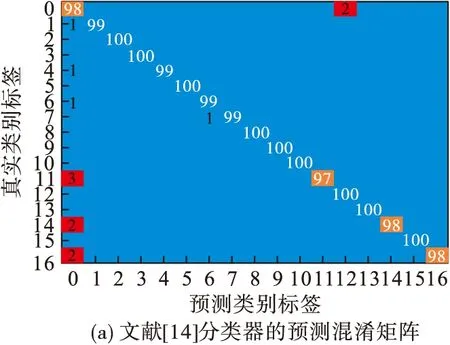
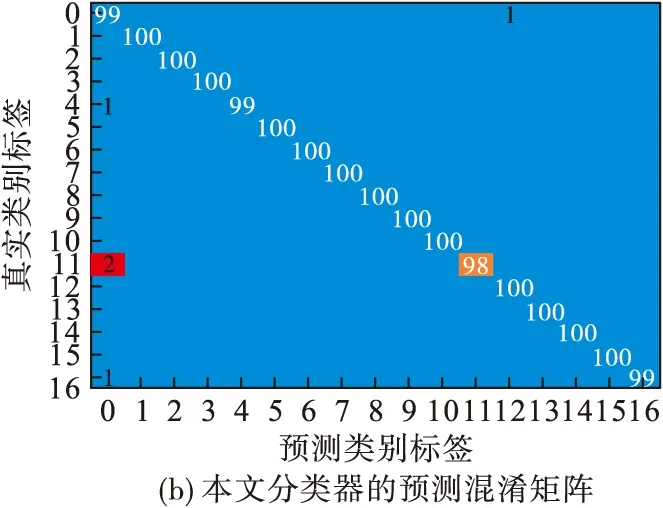
图7 批尺寸为16时得到的分类混淆矩阵
接着,为了验证分类器的稳健性,即分类器在测试环境改变时的性能,使用不同于训练集的信杂比(signal to clutter ratio,SCR)来构建测试数据集,并根据实际对运动目标的时域导向矢量进行修改。
考虑到实际情况中天线接收到的回波在各个脉冲间的幅相变化,构建测试集时将运动目标的时域导向矢量修改为:
(10)
式中:⊙表示哈达玛积,aT=[a0,a1,…,aM-1]T,bT=[ejb0,ejb1,…,ejbM-1]T,aM在[0.9,1.1]之间均匀分布,bM在[-5°,5°]之间均匀分布。
对于批尺寸为16时训练得到的分类器,设置以5的步长逐步减小SCR构建测试集,进行30次实验得到的分类准确率如图8所示。
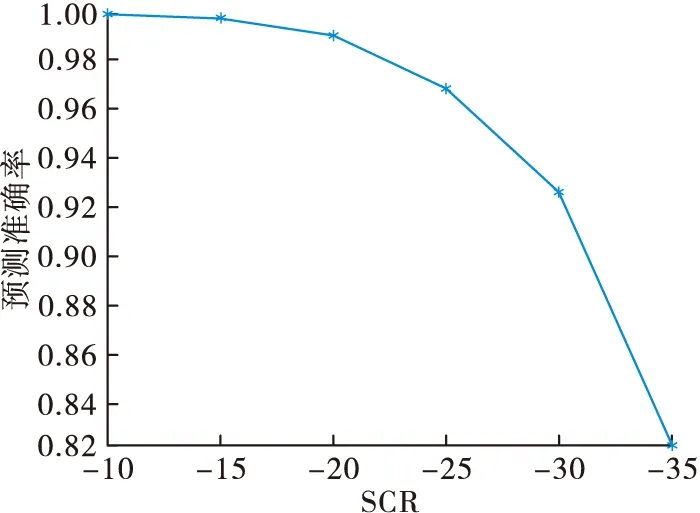
图8 不同信杂比时本文分类器的预测准确率曲线
由图8可以看出,在SCR由-10 dB降为-25 dB的过程中,分类器的预测准确率缓慢下降;当SCR继续降低时,分类器预测准确率快速衰减。当SCR为-30 dB时的预测准确率为92.59%,此时预测混淆矩阵如图9所示,各个类别均有误判现象产生,其中对应k=12,fd=0.187 5的目标准确率仅为37%。这是由于目标的空域归一化频率为0.191 0,与杂波较为接近,在SCR较小时,目标和杂波时难以区分,此时分类器失效。
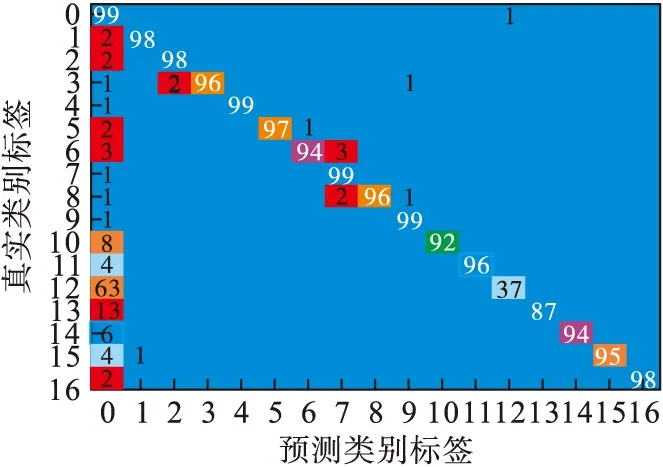
图9 SCR=-30 dB时预测混淆矩阵
3.3 动目标检测

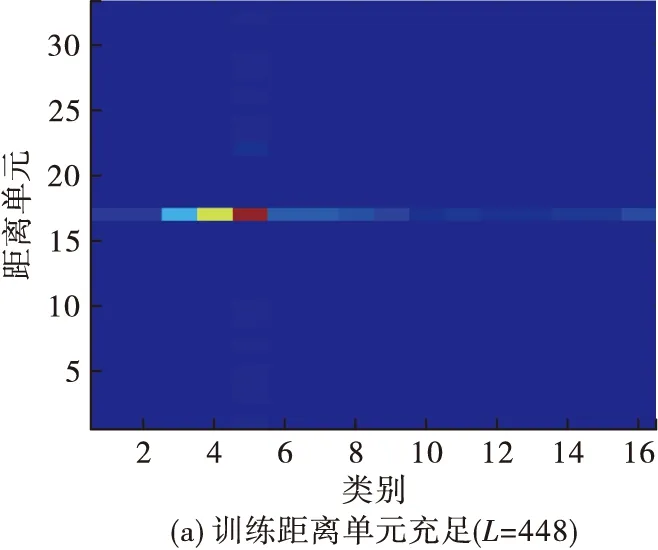
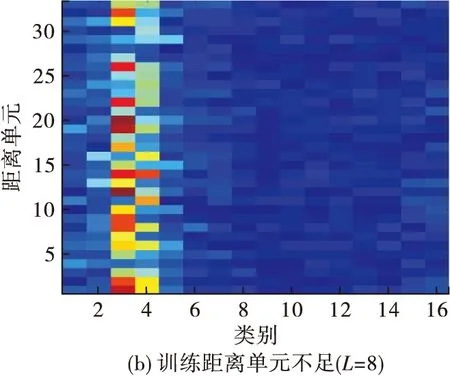
图10 训练距离单元数量对STAP检测结果的影响
对于基于分类的运动目标检测方法(即本文方法和文献[14]方法),基于L=8个训练距离单元,采用不同的批尺寸参数对所构建的多类分类器进行训练,并将33个距离单元空时回波数据输入到训练后的分类器中,检测目标,估计其参数,所得结果如图11和图12所示。
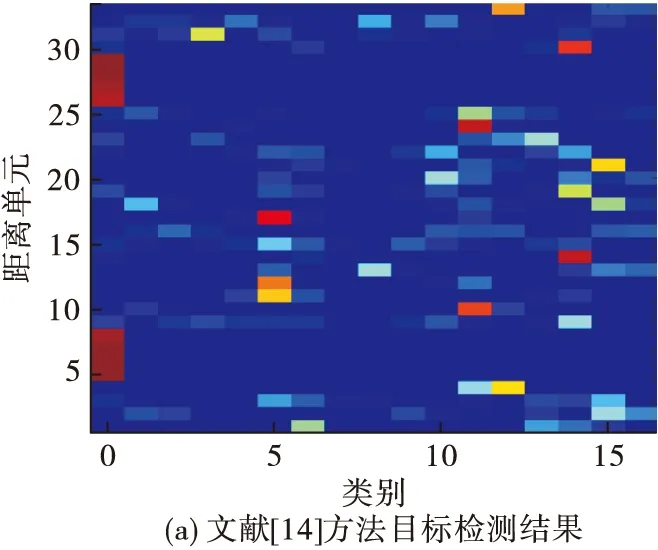

图11 批尺寸为101时两种方法的目标检测结果

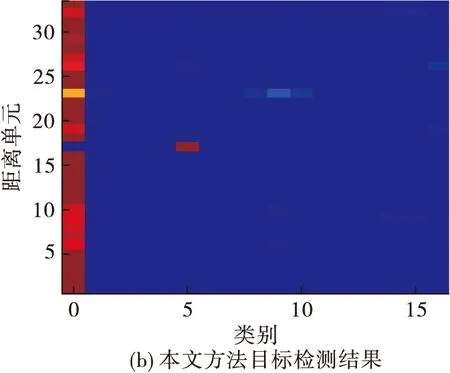
图12 批尺寸为16时两种方法的目标检测结果
从图中可以看出,在批尺寸为101时,文献[14]方法无法有效检测运动目标;当批尺寸为16时,文献[14]方法能够检测运动目标,但性能有待进一步提高。相比之下,本文方法在这两种批尺寸时均能有效检测运动目标,目标所在距离单元为第17个距离单元,目标类别为5(即多普勒频率等于-0.25),性能较文献[14]方法有较大提升,这验证了本文方法的有效性和优越性。
4 结语
为了减少机载雷达运动目标检测所需训练距离单元的数量,提高现有基于分类的运动目标检测方法的性能,本文基于DenseNet构建了分类器,对雷达接收到的空时回波数据进行处理,提取特征进行分类来实现运动目标的检测和参数估计。仿真结果表明该方法与传统STAP方法相比,可以减少所需训练距离单元的数量;与现有基于AlexNet的目标检测方法相比,能获得更加可靠、准确的目标检测结果。
猜你喜欢
科学与信息化(2021年30期)2021-12-24 08:00:20
北京航空航天大学学报(2021年9期)2021-11-02 08:24:26
电子制作(2019年11期)2019-07-04 00:34:38
北京航空航天大学学报(2018年1期)2018-04-20 06:38:17
电子测试(2018年1期)2018-04-18 11:52:35
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
电测与仪表(2014年15期)2014-04-04 12:05:20
