
带相关噪声多传感器系统的事件触发贯序和分布式融合估计
2021-05-29 06:34:48孙书利
空军工程大学学报 2021年2期
王 妮, 孙书利
(黑龙江大学电子工程学院,哈尔滨,150080)
随着网络通信技术的发展,网络系统已引起广泛关注,并应用于公共交通、环境监测、工业控制等领域。由于通信带宽和电池能量的有限性,因此在保证估计精度的条件下,降低网络通信率避免不必要的能源浪费具有十分重要的意义。
事件触发的概念最初于20世纪80年代初在文献[1]中提出。文献[2]将事件触发的概念应用于动态系统的信号采集和处理。文献[3]针对线性系统提出了基于事件触发的传感器数据调度器,并推导了相应的最小均方估值器。文献[4]将事件触发机制应用于贯序融合估计问题。此外,文献[5]首次提出了由当前观测数据和前一个传输观测数据构成的SOD触发机制。文献[6]针对一类离散时变系统,研究了基于SOD事件触发机制的分布式滤波问题。
在多传感器信息融合估计领域,有三种基本融合方法:集中式融合、贯序融合和分布式融合[7-8]。集中式融合方法是将所有传感器的观测数据都传送到融合中心,通过数据增广来得到融合估值。当所有传感器正常工作时,由于该融合方法利用了所有的数据信息,因此可以获得最优精度。贯序融合是根据传感器的观测值到达融合中心的先后顺序依次进行处理的,它的估计精度与集中式融合算法一致。但由于贯序融合算法避免了观测增广,因此很大程度上降低了计算成本[9]。分布式融合算法由于具有并行结构,可克服集中式融合结构不可靠的缺点[10-11]。文献[12]对带相关噪声的多传感器系统提出了贯序融合和分布式融合算法,但是由于忽略了噪声估值器,因此文献[12]所提算法是次优的。文献[13]提出了与集中式融合滤波器的估计精度一致的全局最优贯序融合和分布式融合滤波器,但要求满通信率。近年来,为节省通信成本,基于事件触发机制的多传感器融合估计问题引起了广泛关注。文献[14]研究了带相关噪声的多传感器系统的事件触发集中式融合估计问题。此外,对网络系统中考虑丢包、传输延迟和多速率现象的事件触发状态估计和信息融合的研究也得到了广泛关注[15-18]。
相关噪声在实际工程系统中广泛存在。当连续系统离散时会导致噪声相关[12];具有随机延迟和丢包的网络系统可以转换为带相关噪声的随机参数化系统[19]。近年来,多步相关噪声成为研究热点。对于带一步自相关和两步互相关噪声的随机不确定系统,文献[20]通过新息分析法设计了集中式和分布式融合估值器,文献[21]设计了两级分布式滤波器,其中传感器邻居节点的估计值用于提高估计精度。文献[22]针对带有限步相关噪声的多传感器系统设计了分布式融合滤波器。针对带衰减观测和无限步长时间相关噪声的系统,文献[23]通过新息分析法提出了线性最小方差意义下的最优滤波器、预报器和平滑器。在上述文献中,均需要满通信率,没有考虑节省通信的问题。
目前,有关贯序融合滤波器的结构很少考虑噪声估值器,而分布式融合器往往是次优的。本文考虑无线传感器网络环境下系统的状态估计问题。每个传感器有自己的事件触发调度机制,用于决定是否将传感器的观测数据传输到滤波器。文中采用SOD条件作为事件触发机制。不同传感器的观测噪声之间同时刻相关,并与前一时刻的过程噪声相关。首先,基于观测噪声估值器,提出了事件触发贯序融合算法。然后,提出了带反馈的事件触发分布式融合算法。它们具有全局最优性,即它们与集中式融合算法具有相同的估计精度。
1 问题描述
1.1 系统模型
考虑带N个传感器的离散时间线性随机系统:
x(k+1)=A(k)x(k)+w(k)
(1)
yi(k)=Hi(k)x(k)+vi(k),i=1,2,…,N
(2)
式中:x(k)∈Rn是系统状态,yi(k)∈Rmi是第i个传感器的观测,w(k)和vi(k)分别是过程噪声和观测噪声,A(k)∈Rn×n是状态转移矩阵,Hi(k)∈Rmi×n是观测矩阵。

假设2:状态初值x(0)与w(k)和vi(k)不相关,且满足E{x(0)}=μ0,E{(x(0)-μ0)(x(0)-μ0)T}=P0。
1.2 事件触发机制
为了节省网络能耗,事件触发机制用于决定传感器的观测值是否传送到数据处理中心。在保证估计精度的情况下降低从传感器到估值器或融合中心的通信率。第i个传感器的触发条件与当前时刻的观测值和上一个触发时刻的观测值相关。引入伯努利随机变量γi(k)(γi(k)取0或1)用来描述网络通信。当γi(k)=1时,观测值yi(k)将被传到估值器或融合中心,γi(k)=0表示观测值不会被传输。
与文献[6]类似,第i个传感器的事件触发机制定义如下:
γi(k)=
(3)
其中li(k)表示最近的触发时刻,θi>0为固定阈值,最近的触发时刻li(k)更新过程如下:
(4)
从上述机制中,可以看出当第i个传感器的当前观测值和上一个触发时刻的观测值之间的差值超过固定阈值时,观测值被传送到数据处理中心。
本文的目的是基于SOD触发机制提出了两种在线性最小方差意义下的最优融合估计算法:事件触发贯序融合算法和事件触发分布式融合算法。
2 事件触发集中式融合算法
为了展示所提算法的优势和比较研究,首先,在本节提出事件触发集中式融合状态估计算法。众所周知,当所有传感器正常工作时,集中式融合估计算法是全局最优的。事件触发集中式融合算法结构框图如图1所示。
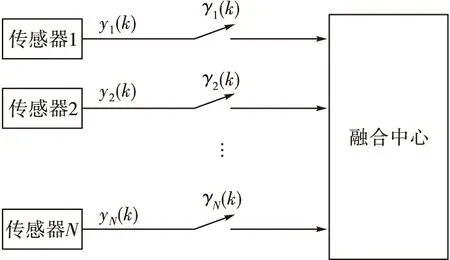
图1 事件触发集中融合结构框图
将每时刻所有传送到融合中心的数据进行融合,由(2)可以得到事件触发集中式融合观测方程:
Y(k)=H(k)x(k)+V(k)
(5)
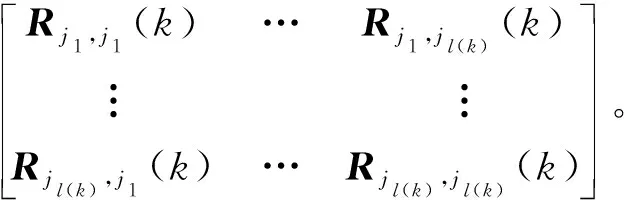
其中增广的观测Y(k),观测矩阵H(k),观测噪声V(k)以及噪声协方差矩阵S(k)和R(k)定义如下:
S(k)=E{w(k-1)VT(k)}=[Sj1(k),…,Sjl(k)(k)],
R(k)=E{V(k)VT(k)}=
针对系统(1)和(5),应用卡尔曼滤波算法,可以得到如下事件触发集中式融合算法。
引理1:系统(1)和(5)在假设1和假设2下,事件触发集中式融合滤波器和预报器为[13]:
(6)
P(c)(k|k)=P(c)(k|k-1)-
K(c)(k)Qε(c)(k)(K(c)(k))T
(7)
(8)
Qε(c)(k)=H(k)P(c)(k|k-1)HT(k)+
H(k)S(k)+ST(k)HT(k)+R(k)
(9)
K(c)(k)=[P(c)(k|k-1)HT(k)+
(10)
(11)
P(c)(k+1|k)=A(k)P(c)(k|k)AT(k)+Q(k)
(12)
3 事件触发贯序融合算法
事件触发贯序融合算法是根据传感器观测值到达融合中心的先后顺序进行实时处理的。由于这种算法避免了观测增广,所以可减轻计算负担。同时与集中式融合算法具有相同的估计精度。本节提出的事件触发贯序融合算法结构框图如图2所示。

图2 事件触发贯序融合结构框图
定理1:系统(1)~(2)在假设1与假设2下,状态x(k)的事件触发贯序融合滤波器为
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
状态x(k+1)的预报器和方差为:
(23)
(24)

(25)



(26)
(27)
(28)
(29)
(30)
结合式(26)~(30),可以得出式(13)~(14)
应用射影理论,观测噪声vi(k)的估值器为:
(31)
由(18)可得噪声的估计误差方程为
(32)
由(32)可以得到协方差矩阵:
(33)
由(13),有状态的滤波误差方程:
(34)
进而,可以得出:
(35)
注1:文献[13]考虑了满通信率情况下的最优贯序融合估计算法,基于文献[13]的结果,定理1给出了事件触发机制下的非满通信率下的最优贯序融合滤波器,它依赖描述事件触发的随机变量γi(k),且要求观测噪声估值器(18)的计算。对于所提出的贯序融合和集中式融合的等价性证明,可类似文献[13]证明,为节省空间,这里不再累述。
4 事件触发分布式融合算法
本节基于文献[13]中带反馈的全局最优分布式融合滤波器提出了事件触发分布式融合算法。带反馈的事件触发分布式融合算法与事件触发集中式融合算法具有相同的估计精度。该算法的结构框图如图3所示。

图3 带反馈的事件触发分布式融合结构框图
触发机制在传感器到局部估值器之间执行。当γi(k)=1时,第i个局部估值器能够接收到第i个传感器的观测值,然后将估计值传送到融合中心。当γi(k)=0时,局部估值器不会收到传感器的观测值,这时局部估计值就是从融合中心反馈回来的融合预报值,此时局部估计值不再传给融合中心。
4.1 带反馈的事件触发局部滤波器
定理2:系统(1)~(2)在假设1和假设2下,带反馈x(d)(k|k-1)和P(d)(k|k-1)的事件触发局部滤波器为:
(36)
(37)
(38)
(39)
(40)
证明:当γi(k)=1时,第i个局部估值器接收到第i个传感器的观测值,因而执行滤波器。当γi(k)=0时,第i个局部估值器无法接收到第i个传感器的观测值,因而执行预报器。类似于引理1,我们可以得到式(36)~(40)。证毕。
4.2 事件触发分布式融合滤波器
基于事件触发的局部滤波器,可以获得融合中心的事件触发分布式融合滤波器。

定理3:系统(1)~(2)在假设1和假设2下,事件触发分布式融合滤波器为:
(41)
P(d)(k|k)=P(d)(k|k-1)-
L(d)(k)Qε(d)(k)(L(d)(k))T
(42)
Qε(d)(k)=K(d)(k)[H(k)P(d)(k|k-1)HT(k)+
H(k)S(k)+ST(k)HT(k)+R(k)](K(d)(k))T
(43)
L(d)(k)=[P(d)(k|k-1)HT(k)+S(k)]
(44)
(45)
P(d)(k+1|k)=A(k)P(d)(k|k)AT(k)+Q(k)
(46)

证明:应用广义逆,定理3可以直接通过文献[13]得出。证毕。
注2:定理2和定理3中,局部估值器的更新是通过收到的观测数据和融合中心的反馈数据来完成的。它们都是在线性最小方差意义下推导的最优估计。基于事件触发机制的分布式融合滤波器的推导过程与文献[13]类似,因此这里不再赘述。
4.3 事件触发集中式和分布式融合滤波器等价性
本节将给出定理3中事件触发分布式融合滤波器和引理1中事件触发集中式融合滤波器的等价性证明。
引理2:若G(t)是一个列满秩矩阵,J(t)为非奇异矩阵,则下式成立:
GT(t)[G(t)J(t)GT(t)]+G(t)=J-1(t)
(47)

根据定理2,可以得到:
(48)
将式(48)代入式(41)中,可得:
(49)
将式(43)代入式(42)中,可得:
P(d)(k|k)=P(d)(k|k-1)-L(d)(k)K(d)(k)·
[H(k)P(d)(k|k-1)HT(k)+H(k)S(k)+
ST(k)HT(k)+R(k)](L(d)(k)K(d)(k))T
(50)
根据(43)和(44),有:
L(d)(k)K(d)(k)=[P(d)(k|k-1)HT(k)+S(k)]·
K(d)T(k)≈{K(d)(k)[H(k)P(d)(k|k-1)HT(k)+
H(k)S(k)+ST(k)HT(k)+R(k)]K(d)T(k)}+·
K(d)(k)
(51)
由于K(d)(k)满足列满秩的条件,应用引理2,可以将(51)转换为:
L(d)(k)K(d)(k)=[P(d)(k|k-1)HT(k)+S(k)]·
[H(k)P(d)(k|k-1)HT(k)+H(k)S(k)+
ST(k)HT(k)+R(k)]-1
(52)

5 仿真研究
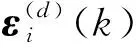
考虑带3个传感器的位置、速度、加速度目标跟踪系统:
yi(k)=Hix(k)+vi(k),i=1,2,3
vi(k)=ηi(k)+βiξ(k-1),i=1,2,3

图4是当θ=1时事件触发集中式融合、贯序融合和分布式融合3种算法的跟踪图,该图是在时间间隔为5步时所绘制。从图4中可以看出,这3种算法具有相同的跟踪效果。图5是3种算法在阈值为1时的方差比较图,从图中可以看出这3种算法在相同初值下具有相同的估计误差方差。图6是所提算法进行100次Monte-Carlo试验后在不同阈值下的均方误差(MSEs)统计仿真曲线图,从图中可以看出随着阈值的增加,MSEs的值也在增加,从而估计性能变差。这与理论分析一致。图7是本文事件触发机制中的阈值取为θ=0.2(平均通信率为:0.838 3)与文献[4]事件触发机制中的阈值取为θ=0.1(平均通信率为:0.905 0)的均方误差比较图。由于文献[4]提出的贯序融合算法没有考虑噪声估值器,所以是一种次优算法。图7验证了本文所提融合算法在通信率较小的情况下的估计精度也可能要比文献[4]估计精度好。
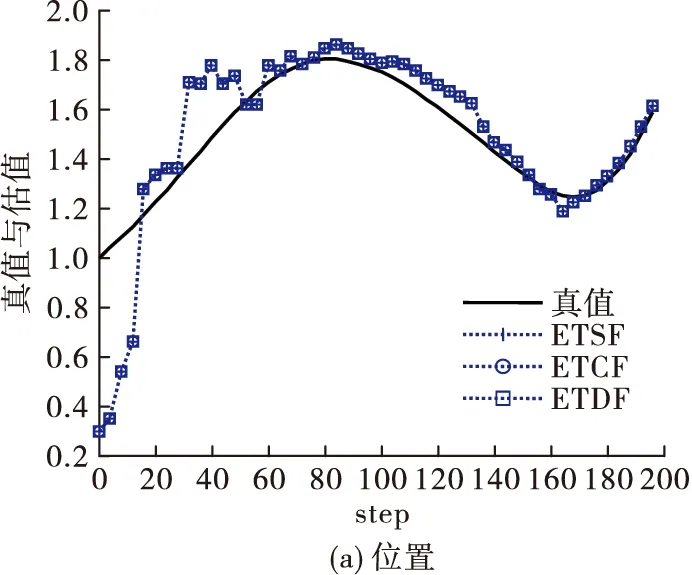
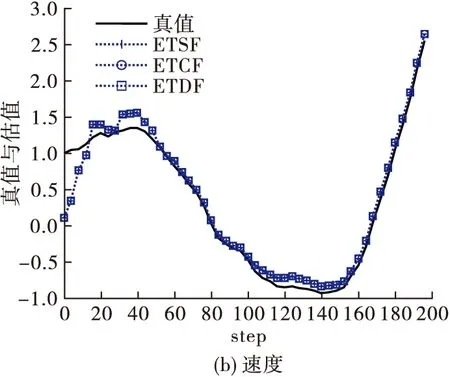
图4 θ=1时3种融合算法的跟踪图
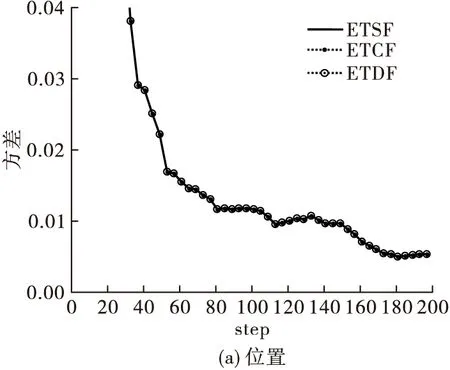


图5 θ=1时ETCF、ETSF、ETDF的方差比较图
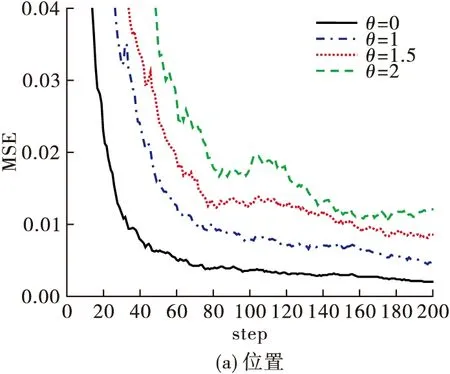


图6 不同阈值下融合算法的MSE曲线比较图
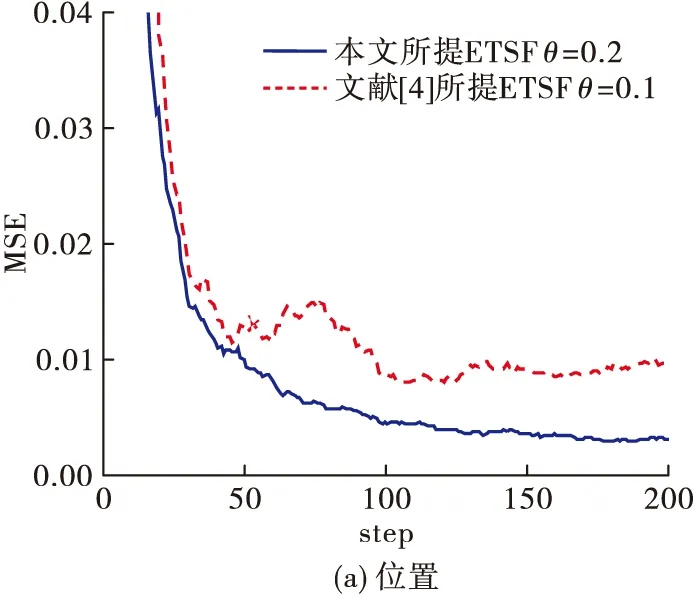
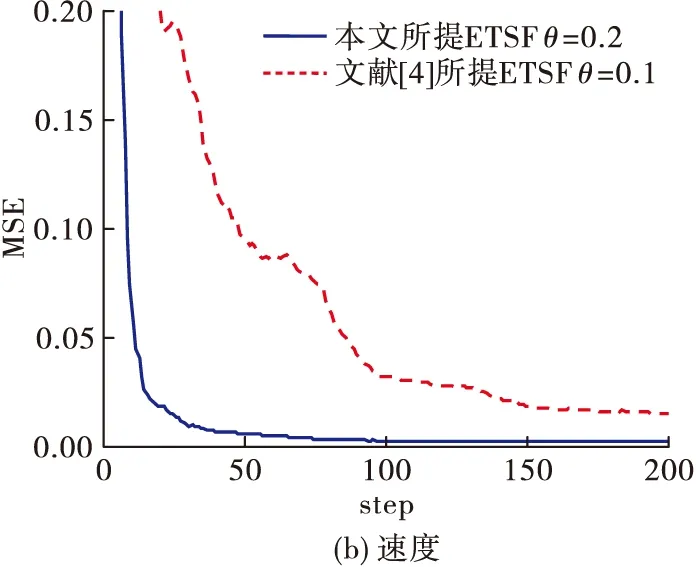

图7 θ=0.2时本文所提ETSF和文献[4]所提ETSF的MSE曲线比较图
6 结语
本文对带相关噪声的多传感器系统提出了事件触发贯序融合估计算法和事件触发分布式融合估计算法。事件触发机制是由当前时刻观测值和上一个触发时刻观测值的差所决定的。贯序融合算法可以根据传感器观测数据到达滤波器的顺序进行实时处理。分布式融合可以对传感器观测数据进行并行处理,具有更好的可靠性。所提出的贯序和分布式融合算法与集中式融合算法都具有相同的估计精度。将来我们将研究结果推广到带有限步相关噪声系统和网络化不确定系统。
猜你喜欢
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年16期)2018-09-26 03:26:50
能源(2018年8期)2018-09-21 07:57:16
能源(2017年10期)2017-12-20 05:54:07
能源(2017年5期)2017-07-06 09:25:54
电子测试(2017年23期)2017-04-04 05:07:46
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
电气化铁道(2016年5期)2016-04-16 05:59:55
工业设计(2016年10期)2016-04-16 02:44:12
火控雷达技术(2016年2期)2016-02-06 02:29:00
