
球面近场多探头一致性校准方法研究
2021-05-28 05:07:22吴翔潘冲张宇张翔
移动通信 2021年3期
吴翔,潘冲,张宇,张翔
(中国信息通信研究院,北京 100191)
0 引言
5G移动通信接入网设备正朝着多波束、多频化以及智能化的方向发展。Massive MIMO天线可以根据用户需求在3D维度产生多个波束。Massive MIMO天线的方向图测量对场地测试能力、测试精度及测试效率带来了巨大的挑战。常规的远场测量手段虽然可以直接测出方向图,但要求较大的测试距离,建设成本高,测试效率低,动态范围要求大。近场测量具备测量效率高、可完成3维测试、占地成本低等优势,成为当前移动通信天线测试系统的主流[1-2]。
但由于N个测量探头形成N个测量通道,各个通道的探头和链路损耗均对最终测试结果产生影响。而对于球面近场测试技术来说,只有获得精确的天线近场幅度和相位数据,才能通过近远场变换算法转换出准确的远场信息。因此,需要消除多个通道间的幅度和相位误差进行定期校准,以消除通道不一致性带来的影响[3]。多年来该项校准技术一直为国外公司独立持有,使得我国开展深入的相关测量精度研究存在技术壁垒。
本文根据行业标准中多探头球面近场测试系统的技术要求,分析和提出多探头一致性校准系统的指标要求和校准方法,并给出了一种系统设计。
1 多探头一致性校准系统技术要求
理想情况下,近场测量需要每个通道保持幅相响应一致,若系统各个通道之间存在不一致,将导致近远场运算变换的远场结果出现误差。多探头系统性能主要包括:探头的幅度性能、相位性能及交叉极化性能三个方面[4-5]。在行业标准YD/T2868《移动通信系统无源天线测量方法》中明确规定了多探头球面近场测试系统的技术要求。
辐射参数测试场地及设备要求如表1所示:
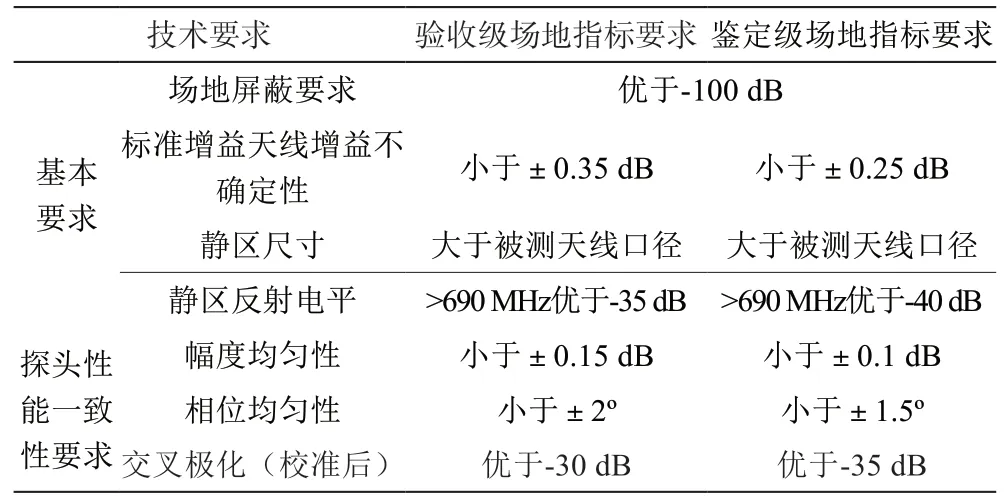
表1 辐射参数测试场地及设备要求(多探头近场)[6]
若希望对某场地进行较高精度的校准,校准装置的精度至少要高出被测系统一个数量级,也即希望如表2所示:

表2 多探头一致性校准技术要求
2 校准方法及校准系统
2.1 校准方法及校准系统设计
设计校准系统如图1所示,标准增益喇叭天线固定在二维转台上,转台俯仰旋转使喇叭能对准各个探头,方位旋转使喇叭能围绕其口面中心作360°旋转。测量过程中需保证测量环境相同,即:
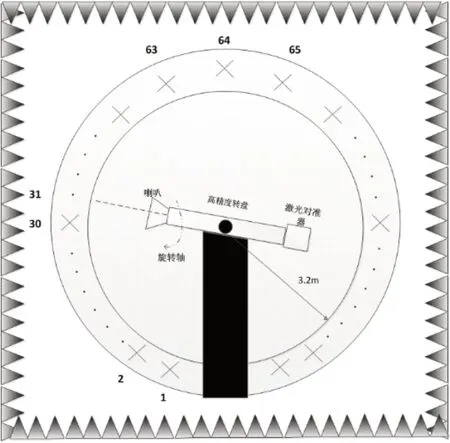
图1 多探头球面近场探头性能校准示意图
(1)喇叭口径面中心到达各个探头的路径距离相同;
(2)圆环中心、喇叭天线口面中心及探头中心三点在一条直线上,需采用激光定位仪精确对准;
(3)测量过程中,保证对于同一个频点,信号源输出信号的幅度稳定。
测量时,将信号源输出设置为某测量频率,转台俯仰旋转使喇叭对准待测探头,喇叭相对探头作360°方位旋转,测量探头相对喇叭在不同极化位置时接收到的幅相数据。对所有探头重复测量,即可得到全部探头所有频点的幅相测量得到矩阵H,然后通过矩阵求逆的方式将H-带入测量结果,从而实现系统校准。
2.2 校准系统的误差分析
在探头一致性校准测量实际操作中,由于转台的步进精度、对准误差等各项系统误差及操作误差的存在,天线对准方向与理想情况之间总会存在一定的误差,将方位角误差记为Δφ,将俯仰角误差记为Δθ,则对准角度误差导致标定天线最大增益方向偏离探头方向,从而导致探头接收信号幅度及相位产生相对误差。
探头一致性计算场景如图2所示,A为理想的标定天线对准探头时的测量位置,B为标定天线与理想情况偏离θ角度时的测量位置,X1,X2分别是位置A和位置B距离探头的距离,h是测试机械臂的长度。X2-X1距离变化带来幅度和相位变化,即为本测试系统带来的测量误差。
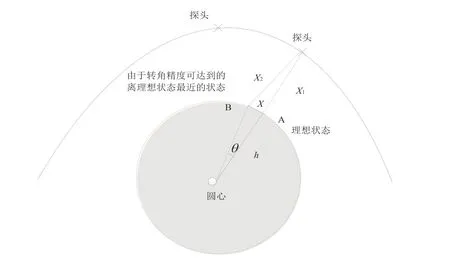
图2 多探头一致性校准系统误差分析
2.3 远场条件
选择双脊标准增益喇叭天线作为标定天线,该天线的最大口面尺寸D为30 cm。多探头系统工作频段及移动通信业务频段,计算如表3所示:
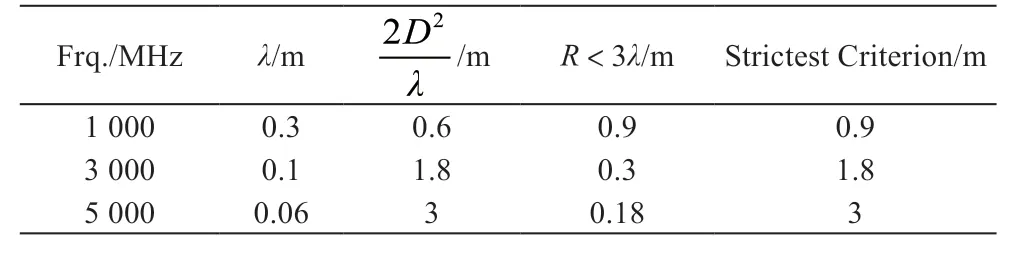
表3 移动通信频段下天线远场条件
可见,128探头系统的测试半径满足5 GHz频率以下的远场条件。
因此,结合各向同性、均匀介质中的远场条件,任意天线其远区辐射场的某一个分量可表示为:

其中,为Eu(θ,φ)天线幅度方向图,ψ(θ,φ)为天线相位方向图,为波数,r为发射源至远场观察点的距离。
2.4 幅度一致性分析
根据Fris传输方程:

其中,PR为接收天线接收功率,PT为发射天线发射功率,GT、GR分别为发射及接收天线增益,λ为天线工作波长。
在对128系统进行探头一致性测量时,为了得到准确的测量结果,需要尽量保证标定天线与探头天线对准。在实际操作中,由于转台的步进精度、对准误差等各项系统及操作误差的存在,天线对准方向与理想情况之间总会存在一定的误差,标记为角度θ,如图2所示。根据前文中描述的Fris传输方程及天线远场分量表达式,该对准误差会从如下两个方面影响幅度测量的一致性:
(1)Δθ的存在导致标定天线最大增益方向偏离探头方向,从而导致探头接收信号强度发生变化;
(2)Δθ的存在使得标定天线距探头的距离发生变化,从而导致探头接收信号强度发生变化。
考虑到在实际测量时,对准角度误差Δθ极小(Δθ≤±0.5°),那么标定天线距探头的距离变化量也是一极小值(Δr≤0.5 mm),作为标定天线的双脊标准增益喇叭天线又具有极为优秀的增益稳定性,因此:
(1)在标定天线最大辐射方向(±0.5°)的范围内,其增益值根据标准喇叭天线方向图可判定,幅度变化极小(<0.01 dB),因此,标定天线最大增益方向偏离探头方向而导致的探头接收信号强度变化可以忽略;
(2)由距离变化导致的天线增益变化可由下式得出:

其中,r为理想情况下标定天线与探头之间的距离。当r=3 200 mm,Δr=0.5 mm时,ΔG≤0.0014 dB,本校准系统的误差满足幅度均匀性校准要求。
2.5 相位一致性分析
根据式(1)结合天线远区场分量表达式,该误差角度Δθ会从如下两个方面影响相位测量的一致性:
(1)Δθ的存在,导致ejψ(θ,φ)发生变化,从而导致探头接收信号相位发生变化;
(2)Δθ的存在使得标定天线距探头的距离发生变化,e-jkr发发生变化,从而导致探头接收信号相位发生变化。
天线的相位中心定义为:在天线上或其邻近若有一参考点,在给定频率下,使得ψ(θ,)φ=常数,则这个使得ψ(θ,)φ=常数的参考点称为相位中心。对于绝大多数天线来说,并没有这样一个相位中心存在。但在许多天线系统中,可以找到一个参考点,使得在大部分角空间特别是在天线主瓣区域内ψ(θ,)φ=常数,则这个参考点称为等效相位中心。
考虑到在实际测量时,对准角度误差Δθ极小(Δθ≤±0.5°),那么标定天线距探头的距离变化量也是一极小值(Δr≤0.5 mm),作为标定天线的双脊标准增益喇叭天线又具有极为优秀的相位稳定性,因此:
(1)在标定天线主瓣最大辐射方向±0.5°的范围内,ψ(θ,φ)常数,ejψ(θ,φ)为常数。因此,由ψ(θ,φ)导致的探头接收信号的相位变化可以忽略不计;
(2)对准角度误差Δθ的存在使得标定天线距探头的距离发生变化,也即,产生一Δr,e-jk(r+Δr),那么,由此产生的探头接收信号相位变化量为:kΔr。
探头的相位一致性要求为≤±2°,要求其校准系统测试相位误差≤±0.2°,换算为弧度为,也即:
对于本128系统而言,其内径尺寸为3.2 m,设计机械臂长h=1.5 m,则X1=3.2-1.5=1.7 m,即:

在此考虑最严格的情况,即:工作波长λ最短的情况(工作频率最高)。此时,设定工作波长λ为60 mm(工作频率为5 GHz)。
如图2所示,结合余弦定理,可得:
3 结束语
本文根据多探头系统的技术指标,设计了一套校准装置及校准方法。通过对幅度和相位的理论分析,若校准系统采用步进精度为0.001°的旋转电机,即可满足多探头系统的校准要求。后续进一步研究基于此校准系统的幅相矩阵补偿技术。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
汽车维修与保养(2020年11期)2020-06-09 05:42:16
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2018年19期)2018-11-14 02:37:02
当代陕西(2018年12期)2018-08-04 05:49:20
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
探测与控制学报(2015年4期)2015-12-15 15:01:00
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
