面向高楼火灾辅助救援机器人的机车分离设计
2021-05-28 12:37王宇迪周丽红袁峥荣谢天张丁余秋月
现代计算机 2021年10期
王宇迪,周丽红,袁峥,荣谢天,张丁,余秋月
(1.武汉科技大学城市学院机电工程学部,武汉430083;2.华中师范大学美术学院,武汉430079)
0 引言
复杂多变的高楼火灾现场,让传统救援困难重重。随着无人机技术的日趋成熟,无人机不仅在航拍、农业植保、电力巡检等领域被广泛应用,还在各类灾害事故的辅助救援上慢慢发挥其巨大作用[1]。目前无人机可借助其搭载的高清摄像机、红外热成像仪等装置模块进行现场情况图的测绘,为救援了解现场情况、制定处置方案、部署处置力量提供依据[1];机载灭火装备进行灭火[2];装载生命检测仪,通过精准定位自主感知和获取到被困人员的详细位置,并将绳索、湿手帕和烧伤药品等轻型物资投送到指定地点,实现被困人员使用物资来进行自救并寻找机会迅速逃离火灾现场[3]。由于火场环境复杂,气流紊乱,很容易使投放物资偏离目标地点。本文针对无人机投放形式限于定点投放的局限性,在保证无人机侦查和定位功能的基础上,设计了一种能够实现将装载了自救物资的载重箱体小车实行自动分离的结构,箱体小车搭载灯光警示模块、发声模块、收声模块和勘探结构单元,实现救援物资精准投放并将准确数据上传到指挥终端,提高搜救效率,减少人员伤亡。
1 整体结构
由于四旋翼无人机具有起降场地要求小,能悬停,自由度高,能全面把控救援场面等优势,本文基于该机型设计了一种面向高层火灾辅助救援的机器人设备,可实现无人机与载重箱体小车的自动分离。本设备由无人机部分、勘探部分、连接部分和载重箱体小车四部分组成,图1和图2分别为产品整体设计三维图和实物模型图。
本文主要讨论该设备的机车分离结构,该结构由具有连接和分离功能的电磁吸盘和装载救援物质的载重箱体小车两部分构成。载重箱体小车具有感知系统模块、电机模块、图像处理模块、路径规划模块以及通信系统模块,这五大模块构成了箱体小车的勘探结构单元,主要用于感知外界环境,收集信息并处理,并自动规划救援路径。另外搭载灯光警示模块、发声模块、收声模块。警示灯光和声音让被困人员在能见度低的火灾现场主动发现箱体小车并靠近;收声模块探测被困人员的声音,并精准无误定位把自救物资和通讯工具送达被困人员;同时将周围环境数据上传至指挥终端,指挥员获得数据后可以根据现场情况迅速安排救援。图2中用红色线圈圈出的是电磁吸盘和载重箱体小车。

图1 产品整体设计三维图

图2 实物模型图
2 机车分离结构
2.1 机车分离设计原理
本分离设计结构主要利用电磁吸盘来实现无人机与箱体小车的连接和分离目的。电磁吸盘是采用电磁原理,通电使内部线圈产生磁力,经过导磁面板将接触在面板表面的Q235普通碳素结构钢片(A3钢)紧紧吸住,通过线圈断电,磁力消失退磁,从而分离和钢片为一整体的箱体小车。通过螺栓将电磁吸盘固定在无人机支架上,在箱体上方加装接触表面大于等于电磁吸盘导磁面的A3钢片与电磁吸盘配合,完成无人机与箱体分离功能。由于电磁吸盘具有磁力分布均匀,工作稳定、吸附力强、体积小、重量轻等优点,在面对高层火灾的紧急情况下,电磁吸盘控制更为方便快捷,并能远程遥控,使得救援效率大大提高。
2.2 电磁吸盘参数选取
本模型设备采用圆形电磁吸盘,实物如图3所示。具体参数如表1所示。图2所示的四个支架位置上分别安装电磁吸盘,总吸合力为32kg。

图3 电磁吸盘
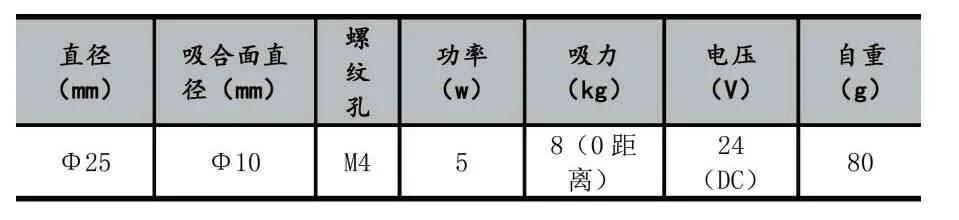
表1 电磁吸盘参数
2.3 载重箱体尺寸设计
箱体进入高层救援时,考虑常规的高层窗框宽度(一般为600mm、800mm、950mm)有限,因此无人机式火灾勘探机器人载重箱体小车总体宽度不得超过600mm。结合无人机和载重箱体小车之间的连接结构,本文所设计的箱体小车为345×345×280mm。详细参数如表2所示。电磁吸盘的总吸合力大于箱体承重约10kg(箱体和小车重量不到1kg),可保证空中运行安全。

表2 设备参数表
3 机车分离路径模拟
为了保证箱体小车能够准确投放,下面对箱体小车的投放方式和投放运动轨迹进行了分析。实现机车分离的整个步骤是无人机静止观察,发现目标,俯冲加速,最后抛射。综合考虑无人机有效侦查范围(火灾浓烟环境可视范围为半径3-7m,热感系统范围为半径15-35m)和墙体对无人机抛投过程的影响,预定位置为距离墙体5m左右,高于窗口5-10m的高度位置进行抛投运动。采用DJI云行系统的动态运行模拟器模块对小车投放和运动轨迹进行了模拟,模拟路径如图4所示。模拟初始条件为:室外温度26℃;火场类型为常规爆燃;窗口周围最高温度220℃;无人机俯冲角度(与水平方向夹角)为40°;俯冲最大速度为6m/s。箱体小车在b点位置开始俯冲,到达B点后电磁断电,抛投载重箱体小车。抛投以后,无人机立刻减速回拉,返回指挥中心;与此同时,箱体小车穿过窗户,在B'(c)点着陆。从模拟结果可以看出,小车落地位置距离墙体10米开外比较安全。根据浓烟环境下小车搭载的可视系统的可视范围(同无人机),设计模拟实验投放合格范围为以预定完美试验点c点为圆心,半径七米(E点)的范围内。当小车安全着陆后,指挥中心通过通信模块与小车建立联系,并根据三米内较为清晰的图像检测信息、接收的声音等信息规划出合理的小车行走轨迹,确保小车将救援物资送达被困人员身边。
4 结语
本文主要采用电磁分离技术,设计了面向高层火灾辅助救援机器人的机车分离结构,并对无人机与箱体小车分离过程进行了模拟。通过模拟实验得出了无人机与箱体小车分离的合适参数,以及箱体小车抛投的合理路径,使得箱体能够既准确又迅速地寻找到被困人员,大大提高被困人员的生存几率。

图4 DJI云行系统的动态运行模拟器模块对小车投放和运动轨迹模拟图
猜你喜欢
计算机应用文摘·触控(2022年8期)2022-05-25
交通科技与管理(2022年8期)2022-05-07
祖国(2020年5期)2020-05-11
新农业(2018年5期)2018-12-05
下一代英才(2018年4期)2018-05-21
科学与财富(2018年9期)2018-05-14
商周刊(2016年22期)2017-09-30
BOSS臻品(2016年10期)2016-10-24
科技资讯(2016年6期)2016-05-14
微型计算机(2009年17期)2009-05-19