基于街景视角的城市骑行视觉环境研究
2021-05-27 05:13廖伟圣夏泽龙
地理空间信息 2021年5期
廖伟圣,李 浩,夏泽龙
(1.河海大学 地球科学与工程学院,江苏 南京 211100)
街景图像是一种新型的网络开放数据源,从人的视角记录了城市街道层级的剖面景象[1],具有语义信息丰富、覆盖面广、采集方便、成本低等特点,已在城市景观量化、城市环境评价、城市建筑规划[2-3]等方面得到广泛应用。同时,街景图像沿着城市路网分布,蕴含了与城市街道环境密切相关的各类语义信息,因此非常适合对街道、社区或整个城市的环境要素进行分析与评价。
骑行是一种便捷的交通方式,也是一种时尚的户外休闲活动。根据出行意愿的不同,可分为通勤骑行(以出行为目的)和休闲骑行(以休闲为目的)两类。本文关注骑行者对休闲旅游的需求,主要分析骑行者在游览过程中对骑行路线的选择偏好。随着GPS定位技术的迅速普及和共享单车的广泛使用,利用骑行轨迹数据探讨用户出行行为的研究越来越多,如吕雄鹰[4]等基于摩拜单车数据分析了上海市共享单车的骑行需求以及时空分布特征,并识别出了骑行交通热点、交通走廊和停放供需矛盾区域,为引导城市实现低碳绿色可持续发展提供了规划思路。然而,目前对于骑行轨迹的研究主要关注用户的出行时空特征,而对骑行路线视觉偏好的研究相对较少。鉴于此,本文以城市骑行轨迹数据和街景图像数据为基础,旨在从街景视角对南京市骑行热点路段的视觉环境进行精细化解读,从而探讨分析骑行者对沿路街道环境的视觉偏好。
1 研究区概况与数据来源
1.1 研究区概况
南京市是江苏省省会,是长江三角洲地区重要的中心城市。截至2019年,南京市的常住人口为850万人,城镇人口为707.2万人,城镇化率达到83.2%。作为国家首批历史文化名城,南京市内及其周边拥有丰富的旅游资源。围绕现有资源,南京市紧扣地方特色打造主题鲜明的旅游景区。本文选取南京市街景图像的主要覆盖区域作为研究区,包括中心城区的鼓楼区、建邺区、玄武区、秦淮区、雨花台以及近年来发展迅速的栖霞区、浦口区、江宁区,如图1所示。

图1 研究区域位置
1.2 数据来源
本文采用的数据包括骑行轨迹数据和街景图像数据。骑行轨迹数据来源于两步路户外运动共享平台(https://www.2bulu.com/)。该平台可提供由用户群体上传的多种类型的休闲出行轨迹数据,如步行、自驾车、骑行等。本文利用Python爬虫工具获得南京市2017-2019年带有地理位置信息的用户骑行轨迹,每条轨迹数据记录包含若干个行车轨迹点,轨迹点又包括线路ID、经纬度坐标、时间戳、瞬时速度、高程等字段信息。对采集的数据进行预处理和整理工作,最终得到4 763条骑行路线和563.4万个轨迹点。街景图像数据来源于百度地图平台(https://map.baidu.com/)发布的城市道路街景数据。以50 m的平均间隔,沿街道路网分别从前后左右4个方向(水平视角对应0°、90°、180°、270°)进行街景图像采集,最终实际采集到210 536张街景图像。骑行GPS轨迹线的空间分布和街景图像示意图如图2所示。
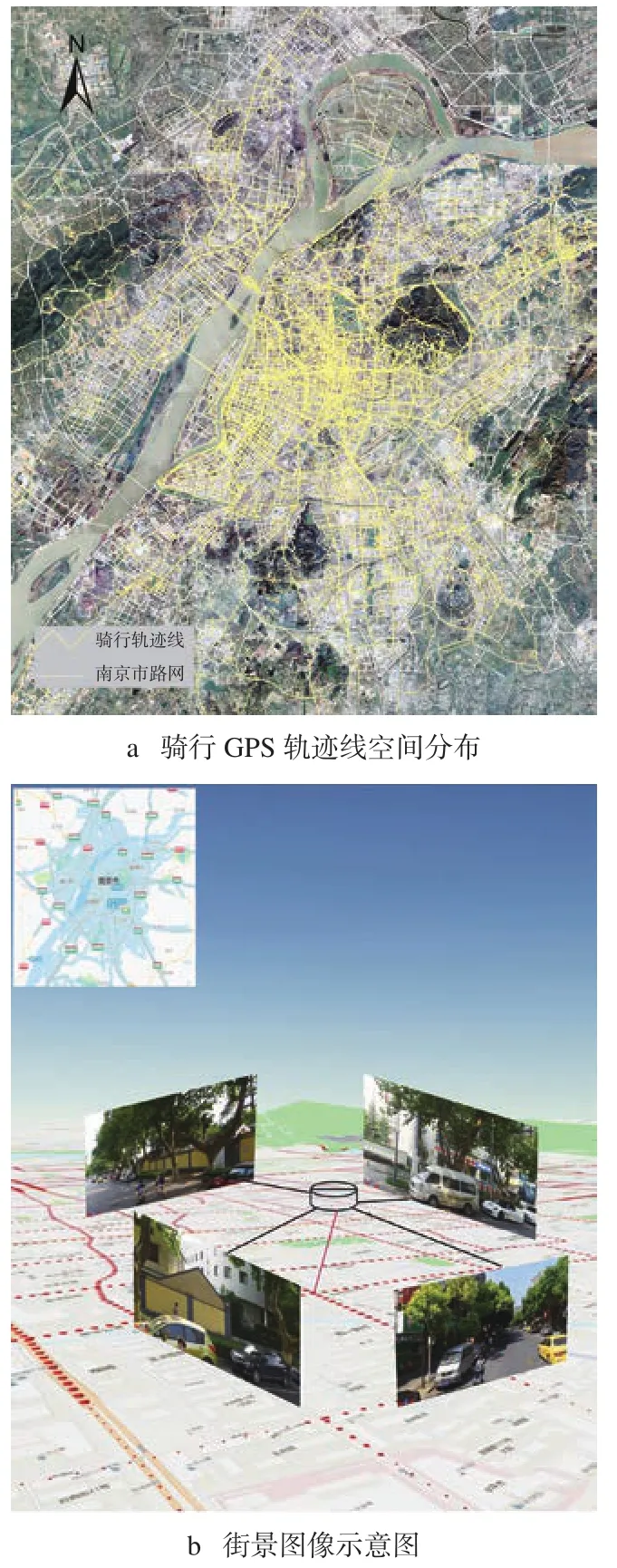
图2 数据源示意图
2 研究方法
2.1 基于轨迹线的热点路段探测
与基于通勤的骑行行为不同,户外休闲骑行灵活随意、不具规则性,更在意骑行过程中的沿途风光,而非骑行目的地[5]。为了探测居民骑行活动在城市路网中的空间分布规律,需要利用轨迹聚类方法挖掘骑行活动频繁的热点路段。然而,基于离散点的点密度算法[6]或聚类算法[7]往往会割裂同一骑行行为轨迹点之间的关联性,难以准确识别骑行者频繁经过的热点路段,不适用于本文的研究内容。因此,本文提出了一种基于轨迹线的热点路段探测方法。为了精细化探测骑行轨迹密集的路段,首先将城市路网按照固定间隔剖分为等距离的路段,并按照固定间隔对轨迹线进行采样,从而将每条轨迹线抽象为相互关联的序列点集;然后将采样点投影到距其最近的路段,统计各路段采样点的个数,并将其设置为路段权重,如R1和R5分别投影了4个和5个点,则路段权重分别对应为4和5。由图3可知,R3路段的权重最大,轨迹线也最密集,说明该路段的骑行活动最频繁。
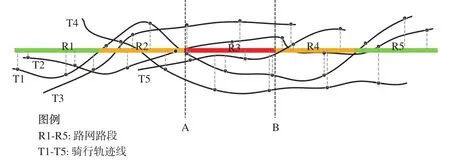
图3 基于轨迹线的热点路段探测方法
2.2 基于街景图像的视觉环境量化
为了从街景图像中获取语义对象,本文采用Python构建金字塔场景解析网络(PSPNet),并结合麻省理工学院公开发布的场景解析数据集(ADE20K)进行图像分割。本文对ADE20K数据集中包含的150个类别进行筛选,考虑到街道环境中的场景要素,重点关注道路、天空、建筑、树木、车辆等类别。经测试,基于Keras深度学习框架实现的PSPNet神经网络在验证集上的预测准确率为0.79,且仅考虑本文重点关注的场景要素时,准确率可达0.92。
为了定量描述场景,本文构建了一个六维的场景表达向量V[8],每个维度对应视场中特定场景要素的覆盖比,以此刻画街景采样点所在位置可见的空间区域的局部视觉环境。场景表达向量由视觉要素组成,既能揭示单一街道场景要素的多样性及其内部差异,又能发掘街道场景之间的共性与特性。

式中,tree_rate、sky_rate、building_rate、road_rate、car_rate、other_rate分别为树木、天空、建筑、道路、车辆、其他等要素在场景的平均比例。
街景图像语义分割流程如图4所示,包括输入街景图像、PSPNet模型解析、输出语义分割结果和统计各要素占比等步骤。
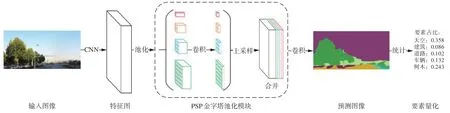
图4 街景图像语义分割流程图
3 实验与结果分析
3.1 骑行热点路段的空间分布特征
权重排序前10%的热点路段的空间分布如图5所示,可以看出,南京市骑行热点路段呈中心聚集、外围分散的特点,即主城区中心热点道路分布集中,主城区外围热点路段分布较零散。为方便进一步探测热点路段的具体位置,根据聚集形态,本文将上述热点路段划分为11个热点区域。
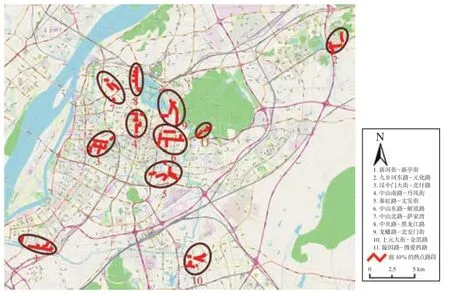
图5 骑行热点路段探测结果
热点区域3、4、5、6位于南京市主城区核心位置,包括的热点路段为汉中门大街—北圩路、中山南路—丹凤街、秦虹路—文安街和中山东路—解放路。该区域邻近南京市规模最大的商业中心—新街口,周边集中了较多的购物、餐饮、娱乐、休闲设施,由此可见商业区对居民骑行行为具有较大的吸引力。热点区域8和9位于玄武湖附近,玄武湖的环湖路一直是骑行者公认的黄金线路,也是首选的市内旅游观光地。热点区域10周边存在众多休闲文化场所,且靠近万达广场、奥特莱斯等商业综合体,优美的绿化环境和完善的商业设施使得更多居民选择骑行方式开展休闲、游览活动。热点区域11地处国家5A级风景区—中山陵内,景区内的紫金山绿道沿线植被茂盛、景点众多,骑行者可欣赏途径的风景,是一种运动与观光相结合的出游方式。热点区域1中的新河街—新亭街位于河西城市生态公园,分布在秦淮新河沿岸。该区域自然景观丰富,是城市与生态环境和谐共处的规划实践案例。热点区域2中的九乡河东路—元化路位于仙林大学城,周边高等院校云集,同时分布有大量的科教文卫机构,该处骑行活动参与者以在校大学生居多。
3.2 骑行热点路段视觉环境量化分析
南京市骑行热点路段的视觉要素占比情况如表1所示,可以看出,天空占比最大的热点路段是新河街—新亭街,位于城市边缘地带,其环境中自然要素占比较突出;相较于其他路段,陵园路—博爱西路的绿化最好,树木占比高达73.6%,绿色清新的环境给人舒适的视觉感受;中山南路—丹凤街地处新街口商业中心区,是建筑和车辆占比最大的热点路段,街道两侧或街角路口分布着密集的高层建筑,聚集了大量商业和生活服务设施,道路严重拥堵;九乡河东路—元化路位于城郊,是道路占比最大的路段,作为仙林大学城中的主干道,车流量小、道路宽敞,周边地形平坦,适宜开展休闲体育活动;总体而言,各要素在热点路段视觉环境中的占比情况与南京市当前城市环境现状基本一致,即主城区和郊区的街道绿化水平存在一定差异,郊区街道更宽敞且具有开阔的视野,主城区街道两侧建筑更密集且车流量较大。
然而,单一视觉要素的比较分析无法揭示骑行者对不同路段的总体视觉感受。为了进一步探究不同热点路段视觉场景的差异性,本文根据每条路段中所有要素的占比分布关系推测其场景类型,采用场景表达向量量化热点路段的视觉环境特征,并绘制不同热点路段中各视觉要素的占比分布图(图6),可以看出,部分热点路段的视觉环境要素占比具有一定的相似性。基于此,本文将上述路段划分为不同的场景类型,若视觉环境中建筑和其他要素的占比突出,且树木占比远大于天空占比,则可将该热点路段定义为市区林荫道类型,建筑密集说明该路段处于城市中的繁华街区,其他要素较多说明其局部环境复杂,常规的5类要素不足以较完整的描述整个环境,树木占比远大于天空占比说明其很可能形成林荫空间;若建筑和其他要素占主导,且树木与天空占比差异较小,则将该路段定义为市区主干道类型;若道路、树木和天空占比较多,且建筑占比较小,则可将该路段定义为郊区主干道类型;若树木、天空以及其他要素占比高,且建筑较少、道路狭窄,说明该处以自然景观为主,可将其定义为郊区小路类型;若建筑和其他要素占比突出,且绿化水平低、车辆占比远大于其他类型道路,说明该处可能位于城市中心商务区,可将其定义为商业街区类型;若树木占比最高,且天空、建筑、道路、车辆占比都非常小,说明该处可能位于较为偏僻的森林覆盖区域,可将其定义为景区林荫道类型。
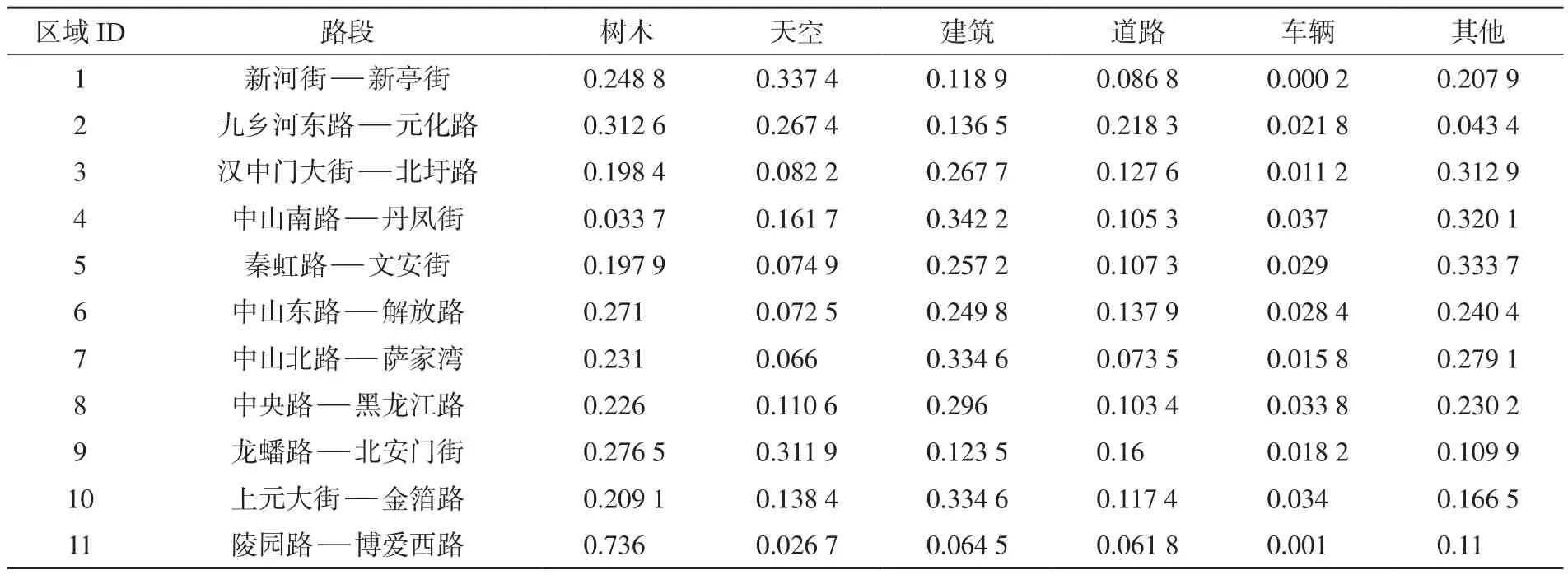
表1 不同热点路段的视觉要素占比
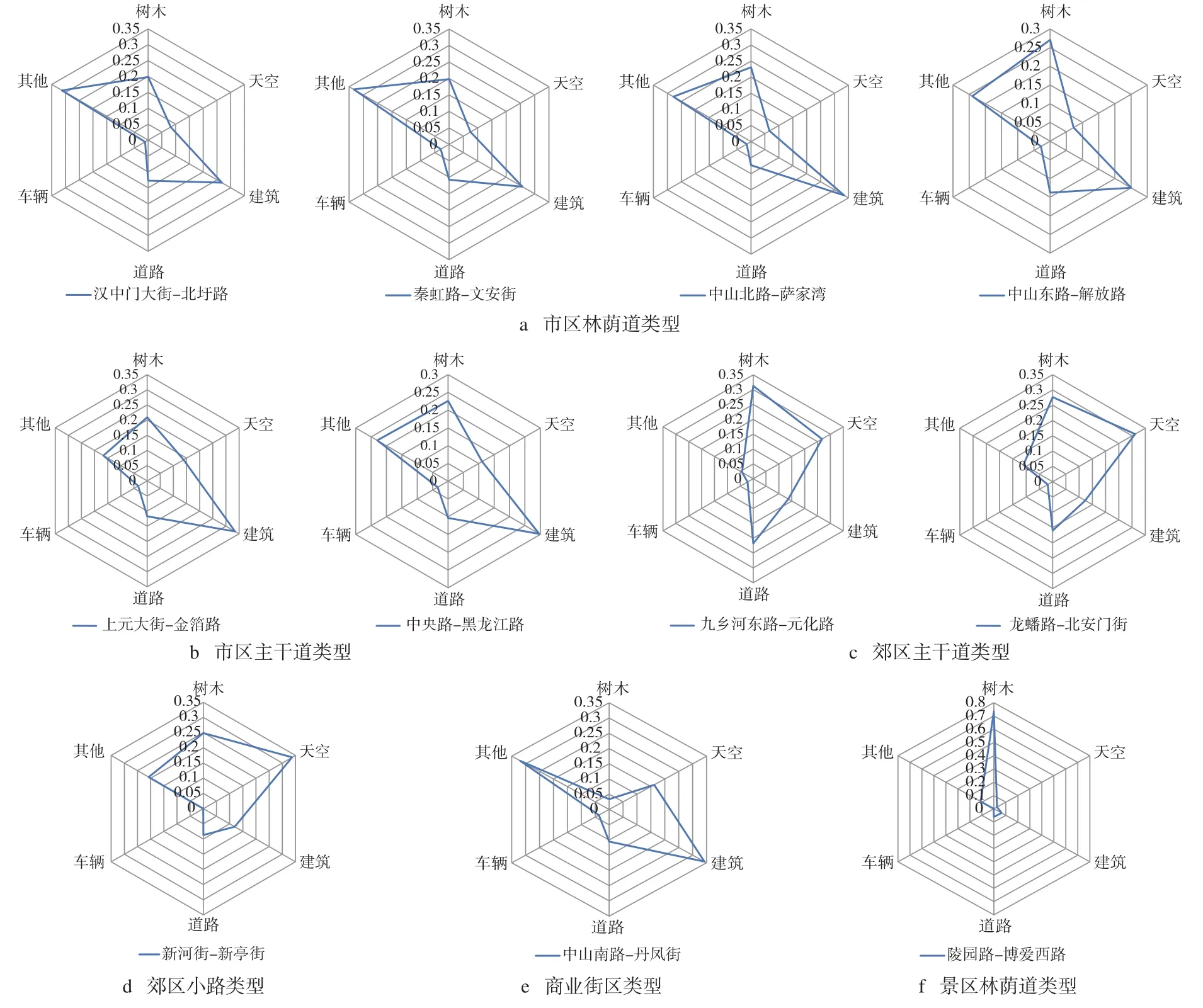
图6 各聚集区域内热点路段各要素占比分布及其所属类别
为了验证上诉分类的合理性以及更直观地对比不同类型热点路段场景的视觉感官差异,本文借助路段实景图像对分类结果进行说明。由图7可知,汉中门大街—北圩路、秦虹路—文安街、中山北路—萨家湾和中山东路—解放路等市区林荫道类型的热点路段,道路遮荫率高、道路两边树木高大挺拔,具有较高的观赏价值;上元大街—金箔路和中央路—黑龙江路作为市区主干道类型,虽然二者都有林荫道路,但未能形成大面积的绿荫;新河街—新亭街属于郊区小路类型,在视觉环境感知中天空开阔、道路两侧绿化好,为骑行活动提供了良好的场所环境;属于郊区主干道的九乡河东路—元化路和龙蟠路—北安门街,与新河街—新亭街有诸多相似,但却具有更加宽敞的道路,是城郊出行的主干道路;中山南路—丹凤街贯穿商业街区,周边高楼林立、车水马龙,树木稀少且矮小,视觉环境中的城市景观特征明显;陵园路—博爱西路位于中山陵风景区内,属于景区林荫道类型,其视觉环境中自然要素极其突出,是骑行者寻幽觅静的好去处。

图7 各热点街道真实视觉环境与所属类型
4 结 语
1)基于休闲骑行轨迹数据挖掘了骑行者频繁经过的热点路段,并结合城市空间结构分析和理解了骑行者对骑行路线的选择偏好。
2)利用街景图像信息量化热点路段街道环境的视觉要素,通过构建场景表达向量进一步分析了不同街道的视觉环境特征;并根据场景环境的相似性将南京市骑行热点路段细分为市区林荫道、市区主干道、郊区主干道、郊区小路、商业街区、景区林荫道6类。
3)融合骑行轨迹数据和街景图像数据,对人类行为活动的环境特征进行了多角度、精细化的研究,既为骑行环境研究提供了新的思路和方法,又为后续休闲骑行空间设计和优化工作的开展提供了辅助决策支持。
猜你喜欢
加油站服务指南(2022年6期)2022-07-28
老年教育(老年大学)(2021年9期)2021-10-11
学生天地(2020年1期)2020-08-25
小学生(看图说画)(2019年12期)2019-12-21
车迷(2019年10期)2019-06-24
快乐语文(2018年7期)2018-05-25
水利规划与设计(2018年1期)2018-01-31
中国资源综合利用(2017年4期)2018-01-22
幼儿智力世界(2017年5期)2017-07-12
儿童故事画报(2016年5期)2017-02-07