
基于改进粒子群算法和AFDPF算法结合的光伏并网系统孤岛检测
2021-05-26 07:53杨擎宇薛太林张昊杰张宇鑫
自动化与仪表 2021年5期
杨擎宇,薛太林,张昊杰,张宇鑫
(山西大学 电力工程系,太原030000)
孤岛效应是指当公用电网发生某些故障的情况后停止给负载进行供电[1],用户端的DG 系统未能即时检测出停电状态而将自身切离主系统,形成由DG系统和周围的负载组成的一个自给供电的孤岛[2]。
随着现今世界各国资源匮乏和对环境的保护重视,分布式电源(DG)不断加入到电网系统中[3],从而不断提高了分布式电源在电网中的渗透率,引入了复杂的扰动,产生的扰动导致错误的系统孤岛判定。分布式电源给原有的公共电网带来了许多的不稳定因素和噪声干扰[4]。一旦分布式电源出现孤岛状态,没有公共电网管控,会导致巨大的经济损失和危害人员安全。所以对孤岛状态的检测要求提高检测精度和检测效率,并且及时发出保护指令将光伏逆变器从公共连接点(PCC)处断开[5]。
主动孤岛检测法是对分布式电源逆变器中人为的注入的扰动量,当没有公共电网的支撑,加入的扰动就会影响系统参数的变化,从而被检测系统检查出来,这类方法研究较为广泛。其优点是检测盲区小、检测速度较快,但其缺点也较明显:①不能满足国家规定电能标准;②扰动造成控制系统的重新调节,并且控制系统对扰动比较灵敏同时不合理的设置可以导致检测失效。
本文通过改进的粒子群算法对正反馈系数k进行实时优化,提高检测精度,缩小检测盲区和检测时间。通过理论分析和在Matlab/Simulink 中搭建AFDPF 仿真模型进行验证。
1 正反馈主动频率偏移法原理
正反馈主动频率偏移法(AFDPF)是一种有效的孤岛检测办法,通过PCC 点电压频率实时监控,在控制系统中加入一定的频率偏移量,将偏移的频率作为逆变器电流的参考频率和相位,使得形成频率扰动,其工作原理如图1、图2所示。
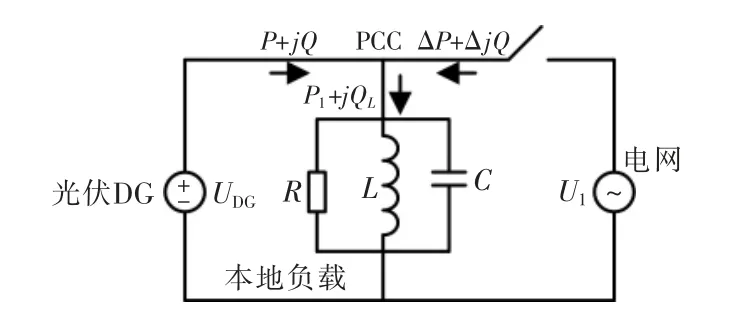
图1 并网光伏发电系统功率图Fig.1 Power diagram of grid connected photovoltaic power generation system
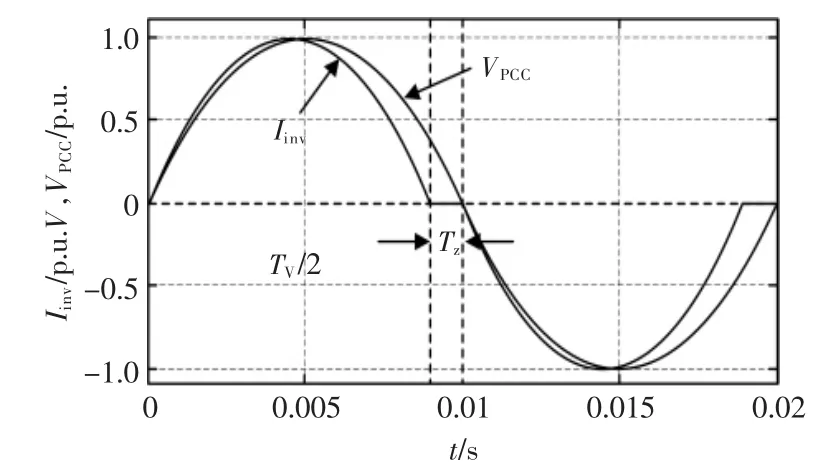
图2 主动频率偏移法原理图Fig.2 Schematic diagram of active frequency offset method
图2 中VPCC为PCC 点电压,Iinv为逆变器输出电流,Tz为半个电流周期频率扰动截断时间。基本正反馈主动移频式孤岛检测技术的表达式为

负载阻抗角为

式中:cf0为初始偏移量;k 为反馈系数。
在电网正常工作情况下,由于PCC 点受电网电压的钳制作用影响[7],加入偏移量不会使PCC 点频率发生变化,但是当主电网发生非计划断开,PCC点没有了主电网抑制,经负载作用逆变器输出带有频率偏移的电流会拉动PCC 点电压频率进行偏移,通过引入正反馈系数k,使得频率超出检测设定值时间更短,从而缩短检测时间。
当本地负载为并联RLC 时,应用AFDPF 算法检测存在盲区。若负载呈容性,负载阻抗角φ<0,则有频率偏移的超前作用与阻抗角的滞后作用相互抵消现象,从而造成检测失败,产生盲区[6]。
光伏并网系统由于扰动方向和负载相位方向不一致等问题,当孤岛发生时,系统无法判定,从而造成检测失败,这就为检测盲区。本文选取Qf0×Cnorm坐标平面来表示检测盲区。根据规定,对于线性AFDPF,控制方式为cf=cf0+kΔ f。
从而可得AFDPF 算法的检测盲区,用“电容值”Cnorm表示如下:

式中:Qf0为50 Hz 下的负载品质因数;ω0为额定角频率;Cnorm为电容标幺值。
2 改进正反馈频率偏移法孤岛检测
本文通过用改进的粒子群算法来实时更新正反馈系数k,使其不断适应不同的负载特性和系统频率的变化,从而达到提高检测的性能和电能质量的目的。
根据AFDPF 算法的基本原理和上文对检测盲区的分析可知,为实现AFDPF 算法检测盲区减小,式(4)的盲区应该取最小:

通过改进的粒子群算法,当大电网断开连接(系统孤岛状态)时候,通过不断的实时的检测PCC点的频率,负载的有功和无功的变化,从而来实时更新正反馈系数k,这样就保证了当负载发生变化的同时来改变正反馈值k 的变化,从而使得AFDPF算法实现盲区的减小。
系统处于并网稳定运行时,频率波动在正常范围,此时根据式(4)对正反馈系数k 进行优化,可能导致扰动量过大,从而造成检测系统的误动作。故本文实施的调整策略如下:
(1)若频率在正常范围内,通过加入初始斩波系数cf0=0.03 进行扰动;
(2)若频率偏离正常值,则根据式(4)改进粒子群算法对正反馈系数k 更新,从而给系统加入式(5)的扰动量,以达到减小AFDPF 算法盲区和缩小检测时间的目的。
AFDPF 算法通过引入正反馈系数k 和斩波cf0,缩短了检测的时间,但也一定程度上增大了扰动,加剧了对电能质量的影响。针对对电网注入较大谐波的问题,选择下面的算法公式,即:

本算法在系统正常运行的情况下f-f0约为0,此时算法不会对系统的整体电能质量有所影响,当发生孤岛状态时,PCC 点的频率发生较大偏移的情况下,通过算法来保证灵敏度;同时通过改进的粒子群算法不断更新正反馈系数来有效地抑制扰动注入电网的谐波进一步增加和检测盲区的变大。改进粒子群算法对k 值更新流程如图3所示。

图3 算法流程Fig.3 Algorithm flow chart
3 仿真与分析
本文通过Matlab 仿真软件搭建光伏发电系统的并网模型,对本文提出的AFDPF 算法的光伏并网系统孤岛检测方法进行仿真检测,仿真模型如图4所示。

图4 仿真模型图Fig.4 Simulation model diagram
相关的参数设置如下:系统电压和频率分别为220 V 和50 Hz;光伏并网系统的输出功率为9 kW;仿真设置大电网在0.1 s 时断开;为了方便对仿真图像的观察电压值缩小为实际的1/3 倍;根据负载品质因数为2.5 时候容易导致检测失败[8],所以选择表1 负载参数进行实验,实验结果如图5~图12所示。

表1 实验负载参数Tab.1 Experimental load parameters
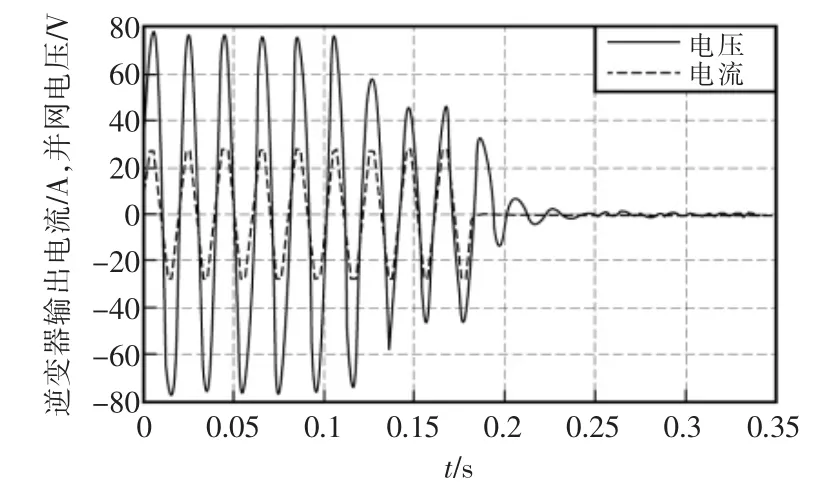
图5 PCC 点电压和并网电流Fig.5 PCC point voltage and grid current
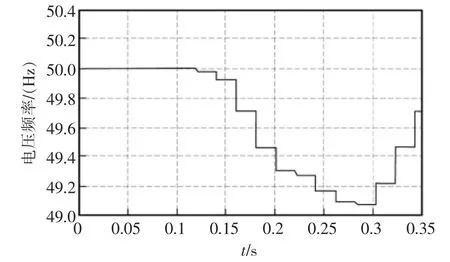
图6 并网电压频率的变化曲线Fig.6 Variation curve of grid connected voltage frequency
(1)负载1 品质因数为2.5,本文用了改进粒子群算法和AFDPF 的算法结合,可以不断改变正反馈系数,从而使得系统在孤岛状态的时候,频率的偏移可以快速的超出保护设定的阈值,完成孤岛检测。
由图7 可得,负载1 呈现容性,改进粒子群算法不断更新优化过程为在0.13 s~0.14 s 即发生孤岛的一个半周期内,k 值由0.03 变成-0.376,此时对应频率开始发生变化,在0.17 s 左右k 值稳定在-0.067,并且一直维持到频率超过检测的阈值,在0.24 s 左右断开逆变器,完成孤岛检测。通过图8 可得电流总谐波畸变率为1.57%,满足检测要求。
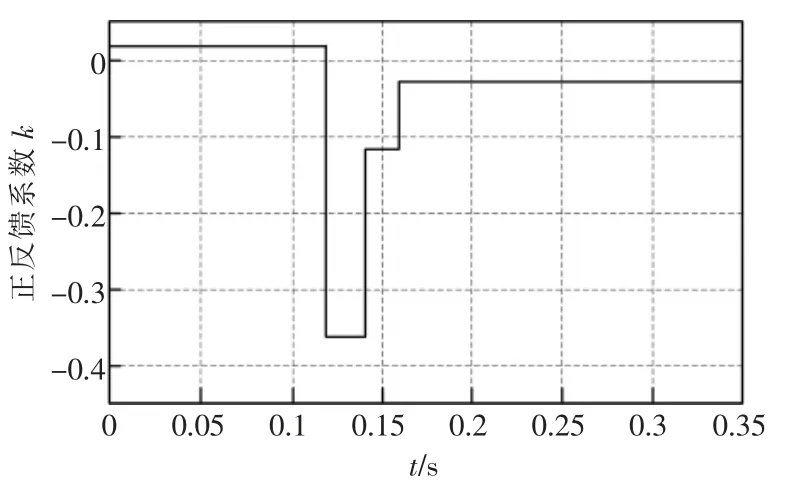
图7 正反馈系数kFig.7 Positive feedback coefficient k

图8 电流谐波THDFig.8 Current harmonic THD
(2)负载2,固定负载品质因数仍然处于AFDPF算法的检测盲区下,但是由下图可以看出本文的方法仍然可以快速检测出孤岛状态下保证反馈系数k对系统电能质量的影响在检测的规定范围之内。

图9 PCC 点电压和电流图Fig.9 PCC point voltage and current diagram

图10 并网电压频率变化图Fig.10 Grid connected voltage frequency variation diagram

图11 正反馈系数kFig.11 Positive feedback coefficient k

图12 并网电流THDFig.12 Grid connected current THD
由于该负载呈感性,本文算法k 值的实时优化整过程为在0.12 s~0.14 s 孤岛发生k 值变成-0.34,随后恢复到正方向的初始值0.03,这表明了算法在判定扰动方向,从而使得k 值得到相应的变化,在0.16 s~0.18 s 内k 值变化为0.12,增加了扰动值k,并在0.21 s 变为0.01,最终直到频率超出检测阈值,完成孤岛检测,电流总谐波畸变率为3.12%,满足检测要求。
4 结语
本文对AFDPF 算法的检测盲区进行分析,通过提出APFDF 算法和改进粒子群算法的结合,从而即可以保证检测盲区的缩小,同时也有效地降低了检测所需时间。本文方法通过实时检测负载的频率变化和系统的频率的波动情况等,通过改进的粒子群算法对正反馈偏移量k 进行实时更新,从而使检测盲区变小的同时快速的检测出孤岛状态,同时也有效地解决了检测方法对电能质量的影响,通过Matlab 仿真实验的验证,表明了该方法的有效性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
趣味(数学)(2022年4期)2022-07-02
新世纪智能(语文备考)(2020年9期)2020-12-31
数学物理学报(2019年4期)2019-10-10
铁道通信信号(2018年12期)2019-01-31
新高考(英语进阶)(2018年1期)2018-04-18
资源再生(2017年4期)2017-06-15
创新作文(小学版)(2017年33期)2017-04-04
贵州师范学院学报(2016年3期)2016-12-01
中国卫生(2015年5期)2015-11-08
