
腰部助力外骨骼的背板及其绑缚优化设计
2021-05-25 13:30:18罗文雪干静刘宏伟明子微刘梓成
机械 2021年5期
罗文雪,干静,刘宏伟,明子微,刘梓成
腰部助力外骨骼的背板及其绑缚优化设计
罗文雪1,干静1,刘宏伟2,明子微1,刘梓成1
(1.四川大学 机械工程学院,四川 成都 610065; 2.北京精密机电控制设备研究所 航天伺服驱动与传动技术实验室,北京 100076)
背板是有源腰部助力外骨骼对腰部助力的重要力传递结构,未经人机考量的背板及其绑缚的穿着体验较差。运用人体测量学和人体解剖学知识,从功能性、贴合性、舒适性三个维度考量,对有源腰部助力外骨骼刚性背板及其绑缚进行优化设计。通过增加连接点位、优化弧度、选用轻质材料、减小面积等,设计出人机性能优化的背板,并对绑缚的位置、结构、材料、调节方式等进行优化。最终设计出满足设计要求的背板及其绑缚。实验验证优化后的背板及绑缚的肩部、上背部、下背部主观舒适度评价均有提升。
外骨骼;背板;尺寸;形态设计;绑缚设计
人工物料搬运在手动作业密集的行业普遍存在,搬运时腰部承载了较大负荷,极易导致职业性腰部损伤。腰部助力外骨骼对穿戴者起到支撑、保护、助力和减少代谢等作用,可以减少人工物料搬运过程中的肌肉负荷和累积性疲劳[1]。
外骨骼采用电机驱动,主要结构如图1所示。背板、腰架、腿架、大腿推板由上至下依次连接,是传递助力的刚性结构。背带是将外骨骼穿戴在人体上的必要部件,是传递助力的关键结构。电池和电机驱动器组成驱动系统,为外骨骼机器人的运动提供动力。

图1 腰部助力外骨骼主要结构
外骨骼的助力机制如图2所示,穿戴者采用肌肉省力更多[2]的半蹲举姿势(即从地面搬举物体时,膝关节弯曲度大约90°,躯干弯曲约45°)。下弯时腰架和腿架间的夹角增大。背板上安装的传感器通过检测背部的姿态和角速度判定穿戴者准备起身时,电机驱动腰架和腿架转动减小夹角,大腿推板推动大腿前侧,腰架带动背板一起转动,通过背带对穿戴者躯干施加拉力,辅助穿戴者的躯干直立。
作为传递助力的关键结构,背板的形状、重量及其与人体的连接方式等都影响着外骨骼的助力效率和穿着体验[3]。但当前的外骨骼研究主要集中于机械结构、控制系统等方面[4],对舒适度的研究较少,导致外骨骼存在质量较大、外观设计较粗糙、绑缚无法调节尺寸等问题,会造成人体局部压力过大导致疼痛。
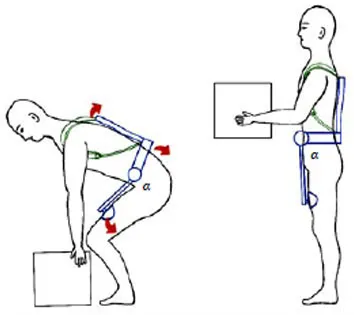
图2 外骨骼助力机制示意图
因此,本文旨在结合人体运动特征、人体测量学和人体解剖学的相关原理和知识,对已有的有源腰部助力外骨骼的背板和背部绑缚进行优化设计,在满足人机协同运动并提供助力的前提下,提高其穿着舒适度。
1 背板的设计
1.1 现有背板存在的不足
(1)无法满足功能要求
目前的聚酯背板有足够的刚度来传递所需的力矩,但实验发现其疲劳强度不足,在重复多次工作后会产生变形、开裂;并且背板上没有相应的连接点位用于搭载柔性绑缚和电池、控制电路板及相应外覆盖件等其他组件,这些组件只能暂时安装于腰架上,对穿戴者躯干屈曲以及双臂运动有较大妨碍。
(2)易引起疼痛或损伤
背板和人体背部形态不够吻合,外骨骼的重力和助力集中在与人体的接触点处,导致接触点的皮肤承受较大的力,引起不适甚至疼痛。尝试通过加大绑缚力来增大背板与人体的接触面积,但绑缚又会对穿戴者皮肤产生压迫和摩擦损伤。
1.2 背板的优化设计
背板首先需要实现其基础功能,通过优化结构和合理选材来保证足够的疲劳强度,并设计相应结构用于连接绑缚系统和电池等组件。其次,需要运用人机工程学等相关知识优化背板曲面形态,使其更加贴合人体,避免局部力集中。
1.2.1 背板的基础功能
(1)刚性背板实现高效传递助力
柔性外骨骼是外骨骼机器人研究领域的热点,但目前仍处在实验室阶段,在技术、工程方面还有许多难题需要攻克[5],暂时只有军事领域使用,难以实现工业化量产[6]。
刚性外骨骼机器人是目前主流的外骨骼,研究更加深入,技术更加成熟,研发成本和生产成本都相对低廉。并且柔性外骨骼传递力矩时弹性形变会损耗部分驱动力,相比之下刚性外骨骼在最大输出扭矩方面更加出色,因此选取刚性背板进行设计。
(2)连接腰架保证整体性
背板需要与腰架进行连接,腰架设计为左右对称的两个独立件,通过横向调节以适应穿戴者的髋宽。因此在背板下部的区域打孔用于连接腰架,通过螺栓与腰架、长度调节器刚性连接。
(3)背板搭载其他组件
背板的背面需要搭载电池、控制系统、驱动系统以及相应的外覆盖件,几种部件形状均为较规则的几何体,接触面为平面,而背板为弧形设计,因此在背板上设计凸台以打造平面连接点,如图3所示,覆盖件独立安装于背板后侧,防尘防水,更加美观。
1.2.2 背板的贴合性设计
(1)构建矢状面曲面
人体脊柱有四个生理弯曲,根据背板尺寸,背板穿戴时与人体背部贴合的部位为胸椎、腰椎段,因此背板的曲面设计主要考虑胸椎、腰椎的曲度。
直立时,人体脊柱的生理弯曲为胸椎后凸,腰椎前凸。屈曲时,胸部的生理结构与组织限制了胸椎的运动,以致活动范围较小[7],屈曲时仍后凸;正常人腰椎由极度屈曲到极度伸直的总活动度在46.7°~81.4°之间,低位腰椎比高位腰椎活动度大[8],屈曲时后凸。
胸椎不论是直立还是屈曲时均后凸,因此背板在胸椎段参考脊柱的生理曲度进行了贴合背部曲线的后凸设计。腰椎的活动范围较大,且在直立、屈曲时弧度方向相反,因此背板在腰椎部分采用无弧度的平直设计,使得直立和弯腰状态都不至于与人体产生过大的空隙或压迫。如图4所示。
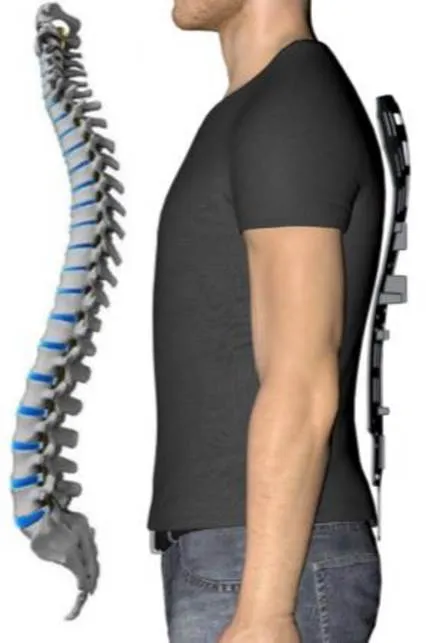
图4 背板矢状面弧度设计
(2)构建水平面曲面
肩、胸、腰、臀四个部位的尺寸能够很好地反映出人体躯干的整体尺寸变化[9]。背板使用时与人体的肩、胸、腰均有接触,也是最容易产生空隙、磕碰或干涉的部位,因此选择肩、胸、腰三个部位的横截面形态指导背板水平面曲线设计,如图5[9]所示。
直立时,肩部横截面在背部一侧的曲线似“M”形,从身体两侧到中央逐渐凸出,脊柱处由于肌肉相对薄弱向内凹陷。胸、腰的曲线也遵循这一规律,但脊柱处凹陷逐渐平缓,因此背板贴合人体横截面曲线进行了弧度设计。屈曲时,由于脊柱、腰背肌肉的拉伸,脊柱处会由内凹转为外凸,因此背板在中间的脊柱处并未凹陷,以容纳穿戴者弯腰时的背部曲线变化。如图6所示。
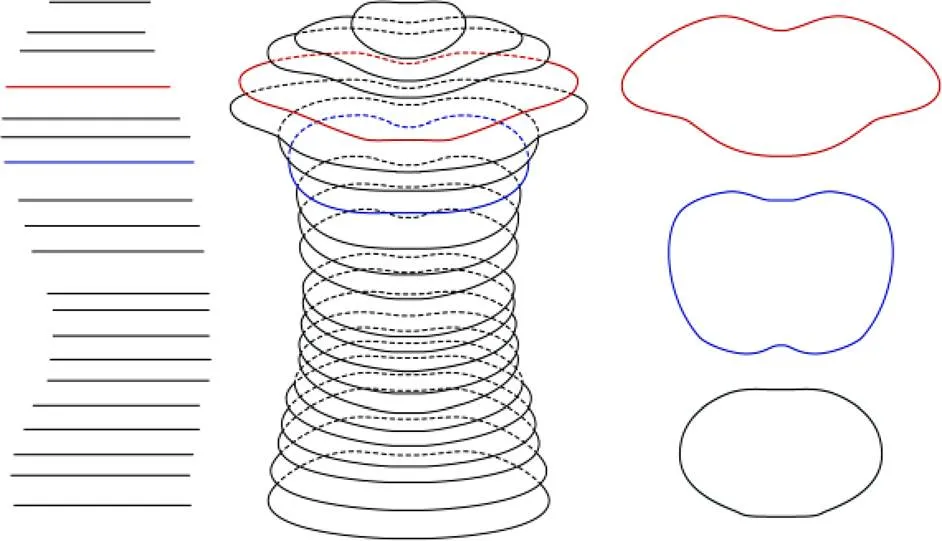
图5 人体体表形态

图6 背板水平面弧度设计
1.2.3 背板的轻量化设计
(1)背板材料的轻量化
美国国防部曾对外骨骼机器人的结构材料做出要求:必须使用坚固、轻型且有弹性的材料。坚固才能有效地保护穿戴者不受伤害,质轻且有弹性可以保证外骨骼穿戴的舒适性并有效减少对穿戴者活动的干涉。除此之外,在实验过程中发现,背板的应力集中处易产生开裂,因此背板材料还应具有足够的疲劳强度。
常见的外骨骼材料有铝合金、钛合金、钛铝合金、复合材料、纳米材料、工程塑料等。铝合金密度低、强度高、塑性好,具有优良的导电性、导热性和抗蚀性,是目前工业中应用最广泛的一类有色金属材料。其中,6061铝合金是经热处理预拉伸工艺生产的高品质铝合金产品,具备较多的镁、硅合金特性,韧性高、塑性好,加工性能和焊接性能极佳,具有良好的抗腐蚀性,材料致密,加工后不易变形,在退火后仍能维持较好的操作性。因此,选用6061铝合金为背板材料,其力学性能如表1所示。
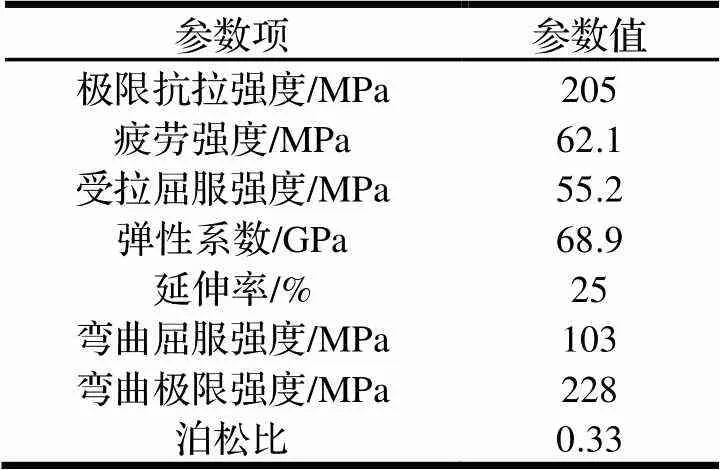
表1 6061铝合金的力学性能
(2)背板结构的轻量化
根据背板的形态结构,在满足所需刚度、强度的前提下增加开孔,可有效减少铝材用量,进而减轻背板重量,如图7所示,仅通过合理增加镂空就使得背板的重量减少了约9.13%。
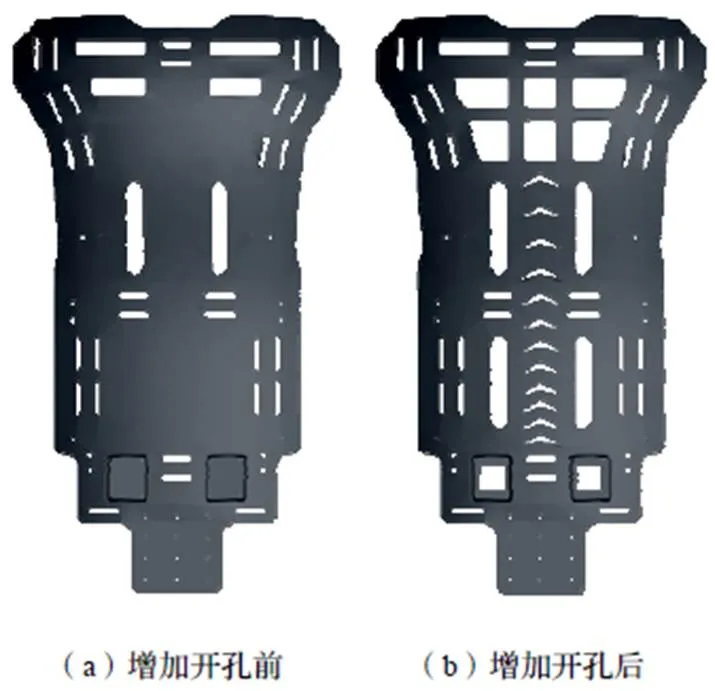
图7 背板增加开孔前后对比
脊柱处的人字形镂空使该区域刚性减小,可以更好地适应屈曲时的背部曲线。此外,增加开孔还能提升外骨骼的通风性,利于搬举时体热的发散和汗液的蒸发,有助于提高人体的舒适度。
2 背部绑缚的优化设计
2.1 现有绑缚存在的问题
(1)背板与人体之间空隙较大
外骨骼施加助力时,背板先运动,通过绑缚系统带动穿戴者躯干,此过程中由于穿戴者和外骨骼运动的细微不同步,背板会与人体背部产生较大空隙,造成能量损耗,降低传递助力的效率;当背板到达直立位停止运动后,人体由于惯性继续运动,会撞击在背板上产生冲击。现有绑缚没能使背板和人体紧密连接,未实现人和外骨骼配合的一致性与协调性[10]。
(2)肩部和后腰椎产生疼痛
肩带是外骨骼与人体进行垂直方向固定的最主要部件,外骨骼的重量大部分都由肩膀承担,肩部受力过于集中,长时间穿戴后易肩痛。
在搬举作业过程中,躯干的屈曲和上肢的运动导致人体与刚性背板间产生接触、碰撞,15~20 min后大部分受试者出现疼痛,在肩胛骨、腰椎处尤其明显。
2.2 绑缚的优化设计
首先需要优化绑缚方式,减少背板与后背的空隙,让背板更加贴合人体。同时对绑缚结构、材料进行优化设计,减小对接触部位皮肤的压强,避免疼痛和损伤;保证透气性,减少出汗量并让汗液尽快蒸发。
2.2.1 贴合性优化
(1)增加胸带
因为有腰带进行固定,人体下背部与背板连接相对更紧密,所以背板和人体的空隙在上背部更加明显。因此设计了胸部绑带,从穿戴者腋下穿过至胸前扣合,在让背板和穿戴者上背部连接更加紧密的同时,也可以分担一部分外骨骼重力,缓解肩部受力。
在此之前,背部只有肩带对背板进行垂直方向的位置固定,胸带的增加引入了水平方向的位置固定,极大改善了背板的左右攒动情况。
(2)尺寸可调节
绑缚的肩带、胸带均加入一段可供长度调节的尼龙织带,可根据穿戴者体型进行无极调节,更好地适应不同穿戴者的身高和胸围,既保证外骨骼和人体紧密贴合,又保证穿戴者顺畅呼吸。
2.2.2 舒适性优化
(1)提高透气性
前文的设计提高了背板的贴合性,但也导致背板与背部接触的部位空气无法顺畅流通,汗液不能有效蒸发,热量无法及时排出体外,让穿戴者感到闷气和不舒适。
因此,首先需要选用具有良好透气性的面料。尼龙材料具有质量较轻、不吸湿、干燥快、强度良好等优点[11],是理想的绑缚面料。其次,在背部柔性垫层与背部接触的一面增加山脊状海绵垫,如图8所示,通过隆起将背包与背部贴合部分支撑起来,达到透气的目的。
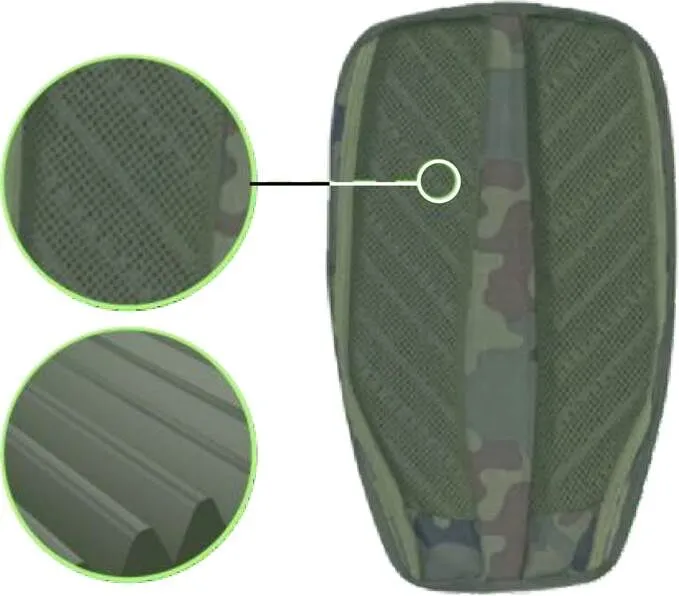
图8 背板山脊状海绵垫
(2)改善对局部的压迫
肩带接触肩膀部分的海绵垫进行加厚加宽处理,缓解外骨骼重力对肩部造成的局部挤压。
胸部绑带内侧与人体接触层选用柔软的弹力松紧带,避免因长时间挤压、摩擦而损伤皮肤;外侧选用无弹性的尼龙织带,限制弹力带的最大拉伸长度,避免过度拉扯缩短其寿命。
背部柔性垫层选取软硬适中的军用背包背部材料,包括防水涂层尼龙、刚性薄板和高密度海绵等,在保证舒适性的同时,避免由于太柔软而消解外骨骼对人体的助力。
3 对比实验
为论证背板形态的合理性及绑缚方式的有效性,选择7名中国人体特征男性设计对比实验。被试者年龄18~25岁,身高170~180 cm,体重60~80 kg,基本生理参数如最大摄氧量、血压、安静心率、心电图等无显著差异。
本次实验共设置2组单一对比变量。实验一:被试者穿戴优化前的腰部外骨骼样机进行物资搬运实验;实验二:被试者穿戴优化后的腰部外骨骼样机进行物资搬运实验。
实验时,被试者穿戴好腰部外骨骼模拟样机,模拟士兵野外转移、装卸、码垛摆放弹药箱的全过程:将A区域初始放置的20 kg弹药箱从地面搬起并匀速行走至10 m远的B区域,按照原样放置后走回至A区域。被试者在A、B区域间往返10次为一组实验。实验结束后,被试者根据各部位的主观感受,对肩部、上背部、下背部进行舒适度评价,舒适度等级分为1~7级,数字越大代表越舒适。
被试人员的主观舒适度评价结果如表2所示,对比可知,背板及背部绑缚优化后的外骨骼,对肩部、上背部、下背部的舒适度均有不同程度提升,其中肩部舒适度提升最多。

表2 各部位主观舒适度评价结果
4 总结
本文通过在背板上设计凸台、孔位,用于搭载部件,满足背板的基础使用功能;通过轻量化设计有效减轻背板重量,减轻穿戴者负担,提升助力效率;通过对背板和背部绑缚系统进行优化,缓解刚性背板对穿戴者背部的压迫,使其穿着贴合度、舒适度有明显提升。本设计符合设计要求,可为有源腰部助力外骨骼的背板和背部绑缚设计提供参考。
[1]Huysamen K,de Looze M,Bosch T,et al. Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks[J]. Applied Ergonomics,2018(68):125-131.
[2]Ko H K,Lee S W,Koo D H,et al. Waist-assistive exoskeleton powered by a singular actuation mechanism for prevention of back-injury[J]. Robotics and Autonomous Systems,2018(107):1-9.
[3]王一鸣. 外骨骼装备舒适度评价指标的实验探究及设计参考[D]. 杭州:浙江大学,2015:70.
[4]高波. 人工装卸搬运助力装置研究现状及关键技术[J]. 中国储运,2014(12):144-147.
[5]胡向春. 柔性外骨骼存在的技术和工程障碍[J]. 防务视点,2017(2):44-45.
[6]周伟杰,韩亚丽,朱松青,等. 柔性外骨骼助力机器人发展现状综述[J]. 南京工程学院学报(自然科学版),2019,17(1):31-38.
[7]倪爱娟,孙秋明,魏高峰,等. 搬运模拟人的“颈椎”屈伸运动测量与标定[J]. 军事医学,2011,35(2):136-138.
[8]饶根云,戴克戎,汤荣光. 非侵入性腰椎屈伸运动的动态观察[J]. 医用生物力学,1997(1):48-54.
[9]庞程方. 基于横截面形态的青年男性体型细分与识别研究[D]. 杭州:浙江理工大学,2015:75.
[10]胡利,干静,周艳丽,等. 重载下肢助力外骨骼足底压力采集鞋垫设计与分析[J]. 机械,2019,46(5):19-23.
[11]任蕊. 户外背包压力分散型背板的研究[D]. 西安:陕西科技大学,2016:92.
Optimization Design of the Back Board and its Binding of the Waist Assistive Exoskeleton
LUO Wenxue1,GAN Jing1,LIU Hongwei2,MING Ziwei1,LIU Zicheng1
( 1.School of Mechanical Engineering, Sichuan University,Chengdu 610065,China; 2.Laboratory of Aerospace Servo Actuation and Transmission, Beijing Research Institute of Precise Mechatronics and Controls, Beijing 100076, China )
The back board is an important force transmission structure of the active waist assistive exoskeleton, but the wearing experience of the back board and its binding, which is lack of the consideration of man-machine performance, is not good. Based on the knowledge of anthropometry and human anatomy, the rigid back board and its binding of the active waist assistive exoskeleton are optimally designed from three dimensions: functionality, conformability and comfortability. By adding connection points, optimizing the radian, using light material and reducing the area, the man-machine performance of the back board is improved, and the position, structure, material and adjustment mode of the binding are optimized. The result shows that the back board and its binding designed meet the design requirements, and the subjective comfort ratings for the shoulders, upper back and lower back are improved after optimization.
exoskeleton;back board;size;form design;binding design
TP242
A
10.3969/j.issn.1006-0316.2021.05.011
1006-0316 (2021) 05-0075-06
2020-06-08
罗文雪(1997-),女,重庆人,硕士研究生,主要研究方向为机械设计、产品设计,E-mail:582361839@qq.com;干静(1968-),女,重庆人,博士,教授,主要研究方向为产品创新设计理论、计算机辅助工业设计、机械设计等。
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
文萃报·周五版(2022年41期)2022-05-30 10:48:04
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
军民两用技术与产品(2021年10期)2021-03-16 06:05:20
高师理科学刊(2020年2期)2020-11-26 06:01:16
能源(2017年5期)2017-07-06 09:25:55
中老年健康(2016年11期)2017-02-05 17:47:23
信息记录材料(2016年4期)2016-03-11 15:23:00
中国塑料(2015年8期)2015-10-14 01:10:55
发明与创新(2015年25期)2015-02-27 10:39:14
