浮式钻井补偿绞车方案设计和性能仿真
2021-05-25 06:58:46黄鲁蒙张彦廷王丽君李悦江陈敬凯
中国石油大学学报(自然科学版) 2021年2期
黄鲁蒙, 张彦廷, 沈 蓉, 王丽君, 李悦江, 陈敬凯
(1.中国石油大学(华东)海洋物探及勘探设备国家工程实验室,山东青岛 266580; 2.兰州兰石石油装备工程股份有限公司青岛分公司,山东青岛 266520)
石油资源的开发和利用正在从浅海走向深海,并向超深海发展[1-2]。半潜式平台或浮船在海上进行钻井作业时会产生周期性的升沉运动,严重影响了钻井作业效率和安全性[3],因此浮式平台或船体上必须配有钻柱升沉补偿装置。钻柱补偿装置通过对海洋钻机上的游动系统和井下钻具进行控制,使其运动不再受到平台和船体升沉运动的干扰[4-5]。国外海洋钻井升沉补偿技术的研究起步早,目前已经开发出液压缸补偿和绞车补偿两种形式的产品[6]。传统的游车大钩和天车补偿装置均采用液压缸补偿方式,通过调整活塞杆和缸体的相对位置来达到运动补偿功能[7-8]。随着设计及控制技术的不断进步,2000年以后,美国National Oilwell Varco公司最早突破传统液压缸式钻柱升沉补偿系统的概念,在常规钻机绞车的基础上增加了升沉补偿功能,研发了新型电动绞车补偿系统[9-10],可取代专用的游车大钩或天车液压缸补偿装置。2007年以后,中国石油大学(华东)、宝鸡石油机械有限公司、山东科瑞机械有限公司、西南石油大学等单位开展了不同形式钻柱升沉补偿系统的研发[11-12],其中针对绞车补偿系统,目前宝石机械已研发一套1 000 hp电动补偿绞车工程样机,厂内试验取得了良好的补偿效果[13]。笔者基于单绞车补偿系统提出一种双绞车补偿方案,对结构参数和升沉补偿能力进行计算,提出升沉补偿与自动送钻的联合控制方案,并利用Simulation X软件对系统性能进行仿真研究。
1 双绞车升沉补偿方案设计
1.1 绞车升沉补偿工作原理
图1为海洋钻机绞车补偿系统原理示意图,绞车安装在井架一侧,绞车滚筒与钻井钢丝绳的快绳端相连;可编程控制器根据绞车转动信号、平台升沉运动信号以及死绳拉力传感器检测到的井底钻压信号,控制绞车滚筒往复转动,通过收放钢丝绳实现升沉补偿、自动送钻、起下钻等海洋钻井作业[14-15]。
1.2 双绞车升沉补偿系统方案
在钻井平台上,通常仅配有一套绞车,绞车滚筒与钻井钢丝绳快绳端相连,而死绳端固定在井架上。为了提高海洋钻井综合性能,提出了一种双绞车补偿方案[16],如图2所示,包括两台补偿绞车,每台绞车分别与快绳端和死绳端相连,可以单侧驱动钻机负载,也可以两台绞车同步运行,此时游动轮系运动和受力完全对称,不再存在传统意义上的“死绳端”。

图1 海洋钻机绞车补偿系统Fig.1 Winch compensation system of offshore drilling rig

图2 双绞车提升及补偿系统Fig.2 Promoting and compensation system with dual-winch
双绞车同步补偿方案的优点:
(1)提高了传动效率。相对于传统单绞车工作方案,双绞车方案可以通过两台绞车同步收放钢丝绳的快绳和死绳两端,天车滑轮组中间的定滑轮片相对静止、无转动,因此每台绞车仅需要克服一半滑轮片的摩阻,从而将游动轮系的传动损失减少一半。
(2)实现了冗余功能,提高了钻井安全性。两台绞车可以互为备用,当一台绞车出现故障时,另一台绞车仍可以正常运行,完成钻井相关作业,从而减少了单台绞车失效带来的非作业时间,使补偿绞车具备了冗余性。
(3)提高了钢丝绳和滑轮片的使用寿命。当提升或下放负载的速度相同时,双绞车工作模式下钢丝绳运动速度仅为单绞车的一半,因此减轻了钢丝绳和滑轮片的磨损。
1.3 基于双滚筒补偿绞车传动方案和参数设计
为了实现双绞车补偿方案,提出了一种基于双滚筒驱动的补偿绞车传动方案:在补偿绞车上设置两台滚筒,利用钻机天车上的导向滑轮将钻井钢丝绳的快绳端和死绳端分别连接到两台滚筒上,每台滚筒利用多台大功率交流电机经过两级齿轮减速后进行单侧驱动(图3),两滚筒之间通过离合器连接,可以同步运行,也可以独立运行。
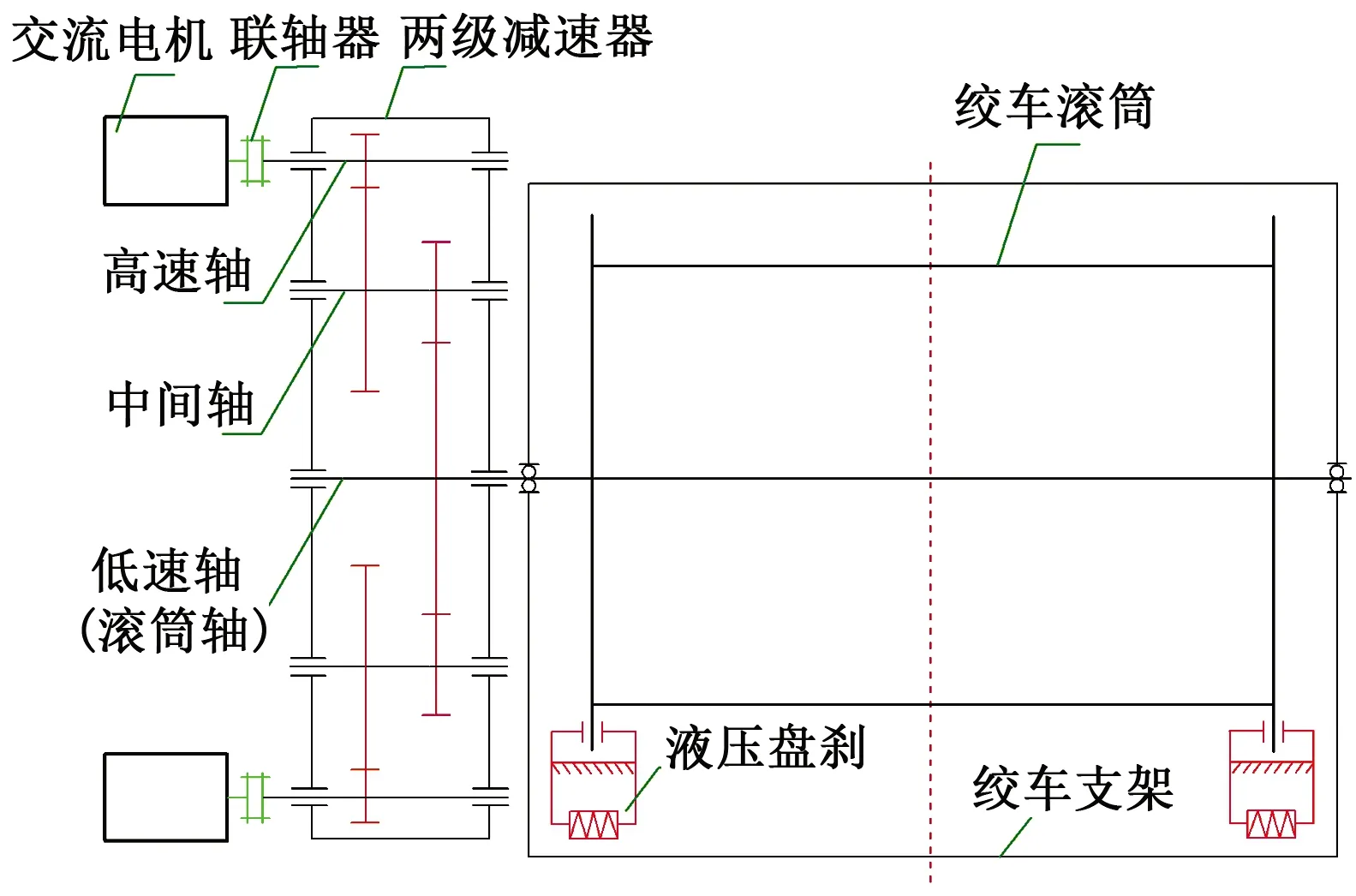
图3 单滚筒补偿绞车结构Fig.3 Structure of compensation winch with single drum
以额定载荷454 t、额定补偿行程5 m、周期12 s作为性能指标[17],设计了补偿绞车、钻机游动轮系、井下钻具的关键结构参数,具体参数如下:额定补偿速度为1.3 m·s-1,最大钻柱质量为454 t,游动系统质量为80 t,钻头设定钻压为20 t,主滚筒尺寸Φ1 580 mm×1 650 mm,单侧绞车向高速转动轴的总体折算转动惯量为300 kg·m2,绞车减速器减速比为16.2,电机型号为5GEB 27,电机额定功率为8台×1 100 kW,电机额定转矩为11 000 N·m,游动轮系的有效绳数为16、12、8、4,单位长度钢丝绳刚度为1.6×106N·m-1,滑轮片传动效率为97%。
2 系统升沉补偿能力的理论计算
2.1 绞车补偿系统能量流分析和计算
分析了绞车的能量传递和消耗过程,在上提负载过程中主要由发电系统为绞车提供能量;在下放负载过程中主要由钻机负载的重力势能提供能量,基本不需要消耗电能,多余能量通过变频单元和制动电阻转化为热能;因此仅需考虑提升负载工况。
在提升负载过程中,假设系统处于理想补偿状态,钻柱无动载荷,则电机主要用来驱动钻机静载荷、驱动绞车和游动轮系往复转动、克服传动摩阻。
(1)假设平台升沉运动为标准正弦波形。

(1)
(2)
式中,x0为平台升沉位移,m;H为平台升沉幅值,m;T为平台升沉周期,s;v0为平台升沉速度,m/s。
(2)克服钻机静载荷与传动摩阻的电机功率。
(3)
式中,G为钻机静载荷,N;η为绞车与游动轮系的总效率。
(3)驱动绞车、滑轮片转动的电机功率。
(4)
(5)
式中,I为折算转动惯量(按照能量守恒原则,将绞车传动系统与钻机游动轮系滑轮片的转动惯量全部折算到电机轴上),kg·m2;θ为电机轴的角位移,rad;Z为游动轮系有效绳数;i为减速器传动比。
2.2 绞车补偿能力数据计算
基于功率计算公式和设计参数,计算得到补偿运动过程中绞车电机克服所有负载所消耗的功率;然后在电机整个调速范围内,通过与电机额定功率进行对比确定绞车额定补偿能力。首先计算了补偿周期为12 s时,不同钻井有效绳数下、双绞车的补偿能力曲线,如图4所示。然后计算得到了钻井有效绳数为12时,不同升沉补偿周期下、双绞车的补偿能力曲线,如图5所示。图4、5中,X轴为补偿载荷,Y轴为绞车所能补偿的最大升沉幅值。

图4 补偿能力曲线(补偿周期12 s)Fig.4 Variation rules of compensation capability (compensation period of 12 s)
绞车补偿系统的补偿载荷和补偿幅度变化范围很大,不再受到液压缸行程的限制;绞车在不同钻井工况下的补偿能力较强,钻井作业窗口较宽,满足本系统设计指标。

图5 补偿能力曲线(有效绳数12绳)Fig.5 Variation rules of compensation capability (number of effective ropes of 12)
分析绞车补偿能力的变化规律,可以看出:
(1)补偿能力受到钻井有效绳数的影响。绞车补偿系统可以通过改变有效绳数改变绞车和钻柱负载之间的传动关系;根据补偿能力数据,针对不同钻井工况制定相应的游动轮系变化规则,可提高绞车在不同工况下的补偿能力和作业效率,并使电机始终在高效区运行。为此提出了一套基于可变绳系的游动轮系设计方案,可以灵活改变游动轮系结构[18]。
(2)补偿能力受到钢丝绳松弛现象影响。在轻载工况下,绞车补偿能力较强,比如有效绳数为4时的最大补偿行程甚至达到二三十米,超过了平台升沉运动的范围;但实际上,当补偿运动幅度过大时,钻井钢丝绳收放线速度和线加速度较大,理论上会造成钢丝绳内部张力反弹,产生“鸟笼”现象,导致钢丝绳变形和损伤,因此轻载工况的升沉补偿幅度实际也不能太大。
以有效绳数8绳、补偿周期12 s时为例,图6为不同负载时的补偿能力曲线,图中虚线段为根据动力学仿真结果对轻载工况补偿能力的修正曲线,其变化规律与NOV公司公开的产品资料类似[19]。

图6 补偿能力修正曲线Fig.6 Correction curve of compensation capability
(3)补偿能力受到电机过载能力的影响。以上补偿能力曲线是基于电机的额定连续工作状态计算而来;而实际电机在断续工作状态下还具有较大的过载能力,美国GE电机过载系数达到140%。补偿绞车可以在特殊的恶劣海况下维持运行一段时间,直到海况恢复平稳;否则如果海况持续恶劣,则只能在绞车额定补偿能力范围内对当前海况进行部分补偿,或者直接关闭补偿系统。
3 运动控制策略
3.1 补偿与送钻的联合控制方案
提出一种联合控制方案,如图7所示:采用外环升沉位移和井底钻压闭环、内环变频电机转速闭环的串级结构,外环采用位移控制,根据钻压信号计算送钻进尺量,将送钻进尺信号xb与升沉位移信号xh叠加,然后以叠加信号作为绞车的给定信号xset,以滚筒实际补偿线位移xd作为反馈信号(将滚筒角位移信号转换为大钩线位移信号),以两者的偏差xe输入控制器,经过位移控制器运算,输出信号f控制电机的速度(频率),同时实现对两种运动的同步跟踪。
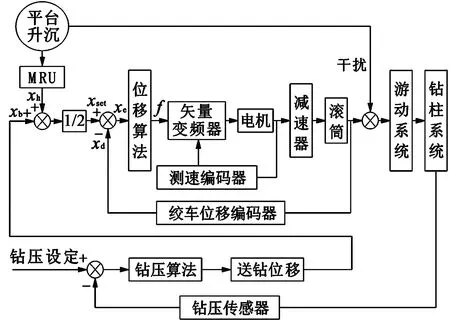
图7 钻井运动联合控制方案Fig.7 Combined control scheme of drilling movement
3.2 外环控制器
(1)位移闭环。外环位移控制器选择常规PID作为控制算法,为了提高系统快速性,防止引入干扰,以比例控制为主,取较小的积分和微分环节。
(2)钻压闭环。外环钻压控制器采用前馈+分段PI反馈控制的方法,前馈是指根据钻压-钻速经验关系,预先给定送钻速度作为前馈信号;然后再利用钻压闭环,通过PI控制器得到反馈控制信号;两部分信号叠加后积分成送钻进尺信号,进而利用绞车位移闭环实现送钻。
4 系统仿真
4.1 基于Simulation X的动力学仿真模型
Simulation X软件是国外海洋工程领域常用的仿真平台之一[20],如图8所示,利用Simulation X建立了系统仿真模型,从而实现对系统动力学特性及控制效果的仿真。
仿真时间设置:Start-0 s,Stop-200 s。
求解器选择:Fixed Step Solver (External Solver)。
仿真步长设置:dtMin 0.000 8 s。
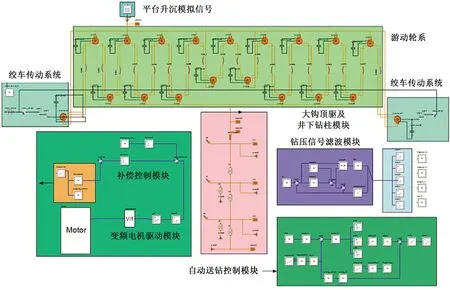
图8 基于Simulation X的双绞车补偿系统模型Fig.8 Model of compensation system with dual-winch based on Simulation X
4.2 控制性能仿真利用
Simulation X动力学模型开展仿真研究,选择额定设计工况作为仿真工况。首先选择行程5 m、周期12 s的正弦波模拟平台升沉运动,作为仿真模型的输入激励信号,通过试凑法整定合适的位移控制器参数,控制绞车对该升沉运动进行补偿;然后以设定钻压20 t作为仿真模型输入激励信号,整定合适的钻压控制器参数,控制绞车同时实现自动送钻运动。
图9为平台和游车大钩的升沉运动曲线,为了模拟不同钻井过程,将仿真设置为4个阶段。
(1)升沉补偿的稳定运行阶段(0~30 s)。位移控制器比例增益设置为50,可以看出补偿功能稳定运行后,游车大钩的运动幅度较小,相对于平台升沉的位移补偿率超过93%,精度较高。
(2)钻头接触井底前阶段(30~50 s)。升沉补偿运动运行稳定后,开始准备钻进,送钻开始前钻头与井底之间存在一段距离,模型中设置钻头与井底距离1 m,然后以180 m/h速度手动或自动下放钻柱,当钻头开始接触井底时停止。
(3)自动送钻阶段(50~200 s)。设定钻压为20 t、钻压控制器比例增益为50,启动自动送钻,由于比例增益较大,送钻速度较快,钻柱快速下放使钻头很快加载到设定钻压;送钻运动稳定后,井底钻压在设定钻压附近波动,此时将钻压控制器比例增益下降到30,在不影响送钻性能的前提下,提高了系统稳定性。由图9中可以看出,钻柱大约以35 m/h的速度持续送进,实现了升沉补偿与自动送钻运动的同步稳定运行。
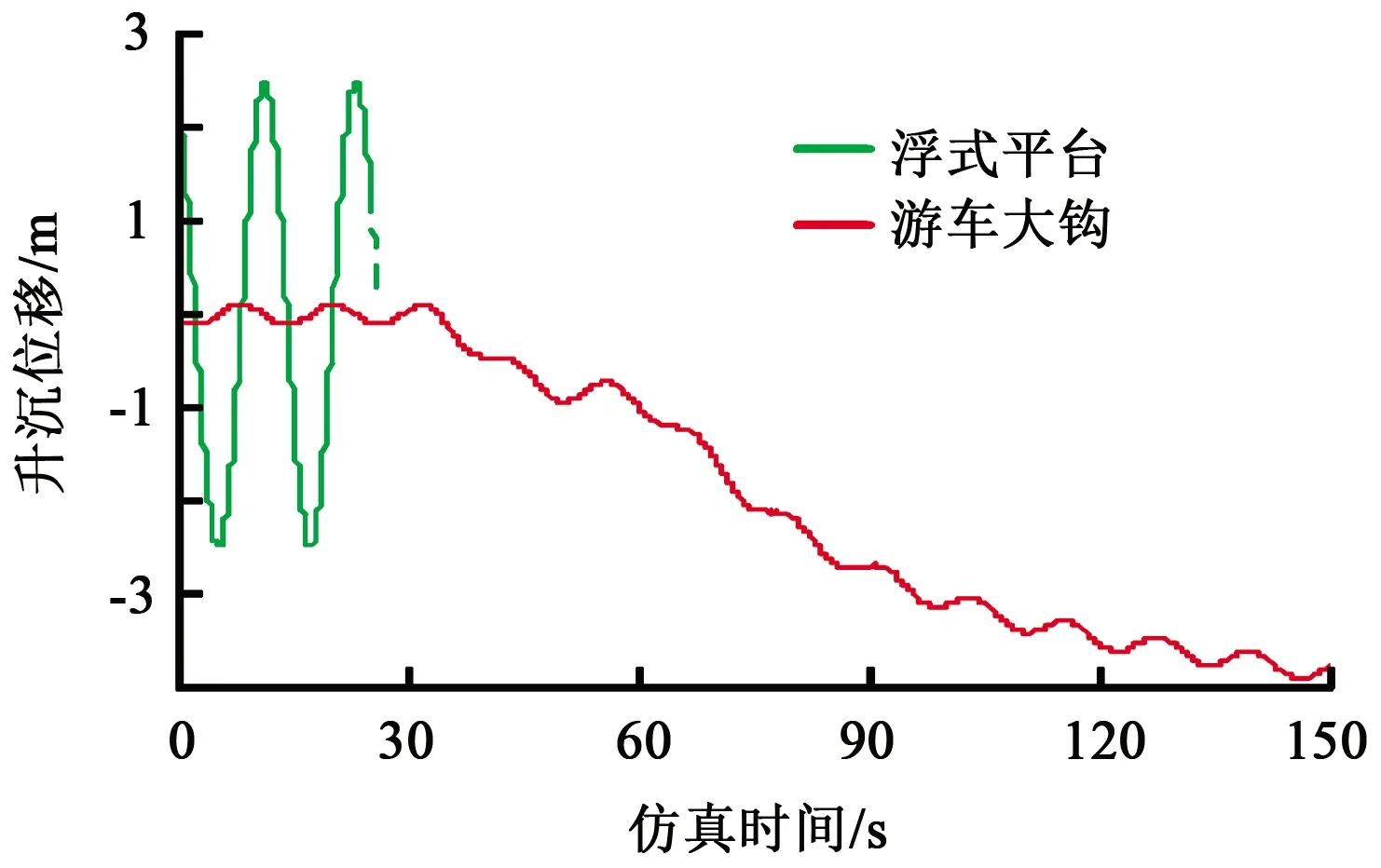
图9 升沉位移变化曲线Fig.9 Variation rules of heave displacement
图10为自动送钻过程中的钻压阶跃响应曲线。图中绿色曲线为设定钻压20 t的阶跃信号,可以看出阶跃响应动态性能良好,钻压稳定在24 kN内,波动率为12%。
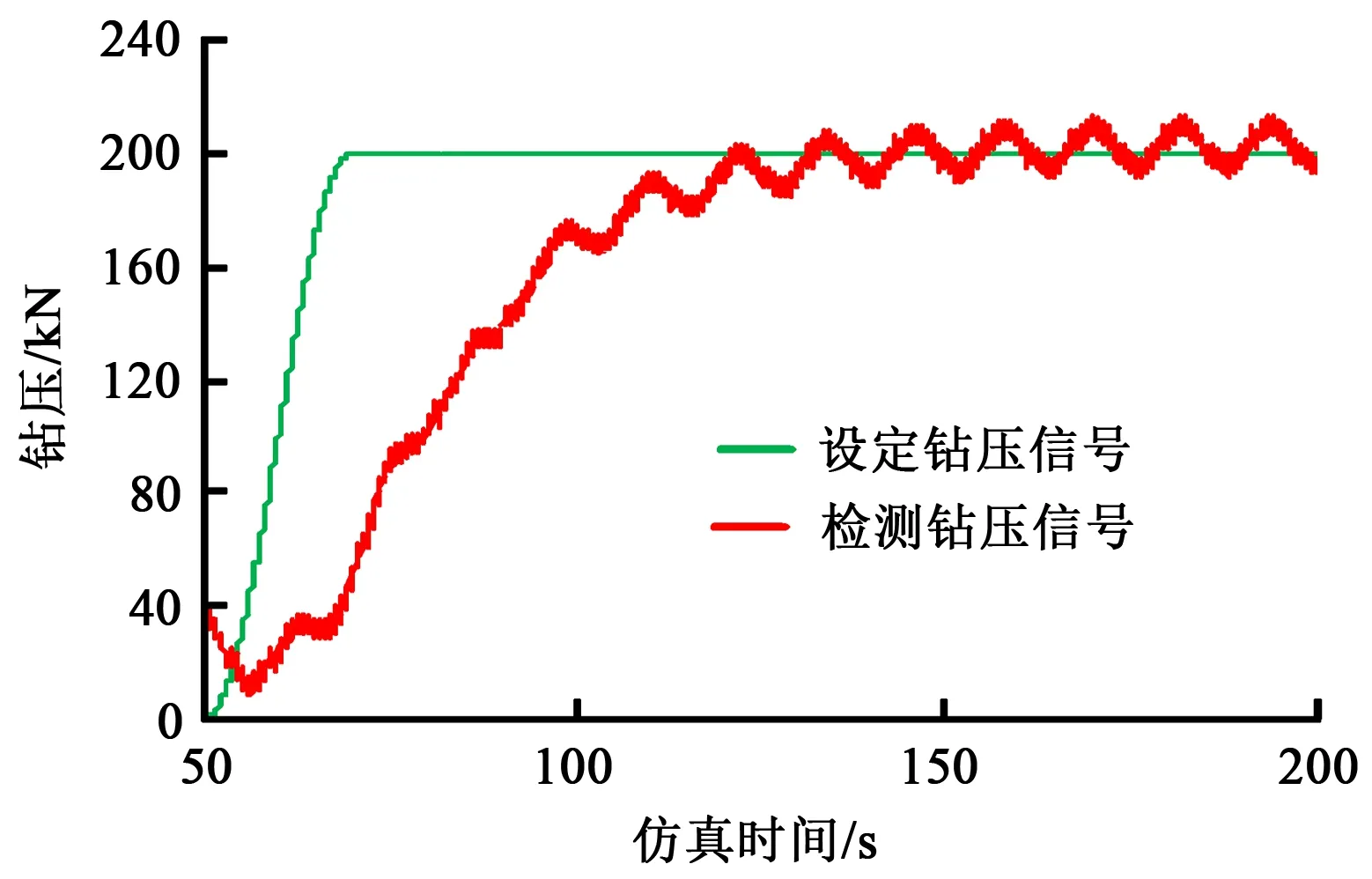
图10 钻压阶跃响应曲线Fig.10 Step response of WOB
5 结 论
(1)提出的新型双绞车补偿方案中,设计了双滚筒绞车的关键结构,两台滚筒可同步运行,此时游动轮系运动和受力完全对称,相对于单绞车方案,具有传动效率高、安全冗余、钢丝绳和滑轮片使用寿命长等特殊优势。
(2)对绞车补偿能力进行了定量评价,绞车补偿系统在不同钻井工况下的补偿能力较强,钻井作业窗口较宽,满足技术指标要求。
(3)双绞车补偿系统运行稳定,可实现补偿与送钻运动的联合控制,补偿率可达93%,送钻过程运行平稳,满足海洋浮式钻井要求。
猜你喜欢
少儿画王(3-6岁)(2023年4期)2023-06-28 11:01:55
装备制造技术(2021年5期)2021-08-14 01:45:02
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
小学科学(2020年11期)2020-03-04 11:39:00
制造技术与机床(2017年7期)2018-01-19 02:29:51
陶瓷学报(2015年4期)2015-12-17 12:45:04
同煤科技(2015年4期)2015-08-21 12:51:04
天津诗人(2014年4期)2014-11-14 19:05:52
河南科技(2014年24期)2014-02-27 14:19:41
河南科技(2014年12期)2014-02-27 14:10:35