
基于毫米波雷达实现遥控装载机装车防撞功能的应用研究
2021-05-25 10:03:40周利圆
科学技术创新 2021年11期
周利圆
(广西柳工机械股份有限公司,广西 柳州545007)
远程操控方式适用于对司机的人身安全具有重大威胁的工作环境,比如抢险救灾时生命通道的开通或修复、高温/高尘/高辐射环境中的物料铲掘和搬运等。司机在远程端遥控装载机进行铲装作业,由于摄像头的视野有限,司机会感觉远程端的视频画面没有人眼在现场观察真实,因此在远程端进行装卸物料时,仅从视频画面无法精确地判断当前装载机与卡车之间的距离,在这种情况下,极易发生因距离判断失误而导致装车失败或者装载机碰撞障碍物。这些问题会导致直接和间接的损失,而且工作效率低,因此,我们希望找到一种可靠的、准确的、辅助设备来协助司机探测装载机和卡车之间的距离,尽可能减少碰撞事故和无法装车的情况发生,从而提高生产效率。
1 远程装载机防碰撞系统现状分析
1.1 超声波与毫米波雷达雷达防撞方案比较
1.1.1 超声波雷达原理
超声波测距原理是超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。通过时间差来测算距离。目前,常用探头的工作频率有40KHz、48KHz 和58KHz 三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,故一般采用40KHz的探头。
超声波测距原理简单、成本低、制作方便,但其应用有一定局限性,这是因为超声波的传输速度受大气影响较大,不同的大气条件下传播速度不一样,另一方面是对于远距离的障碍物,由于反射波过于微弱,使得灵敏度下降。故超声波测距常用于短距离测距,最佳距离为4-5 米,一般应用在倒车防撞系统上[3]。
1.1.2 毫米波雷达原理
毫米波雷达测距是利用从目标处反射回来的电磁波发现目标并测定其位置,经过分析判断,对构成危险的目标按程度不同进行报警。在车辆行进中,雷达窄波束向前发射调频连续波信号,当发射信号遇到目标时,被反射回来为同一天线接收,经混频放大处理后,可用其差拍信号间相差来表示雷达与目标的距离,把对应的脉冲信号经微处理器处理计算可得到距离数值,由差频信号与相对速度关系,计算出目标对雷达的相对速度,微处理器将上述两个物理量代入危险时间函数数字模型后,即可算出危险时间,当危险程度达到各种不同级别时,分别输出报警信号或通过车辆控制电路去控制车速或刹车[3]。
毫米波雷达克服了超声波测距探测方式中的缺点,具有稳定的探测性能,不易受被测物体表面形状、颜色等的影响,调制简单,价格低廉,可以全天候工作,不受天气状况如雨、雪、雾影响,探测距离远、运行可靠等特点,且近年来随着高频器件和单片微波集成电路的出现和应用,毫米波雷达的性能有了很大的提高,成本也有所下降,并且雷达的外型尺寸可以做得很小,便于在车上安装,故作为目前国内外车用防撞雷达的普遍选择方式[3]。
1.2 遥控装载机现有的防撞措施
现有的防撞措施是靠安装于车身两侧和后侧的超声波雷达装置,只能预警后方和侧方的障碍物,而前方无任何防撞措施。
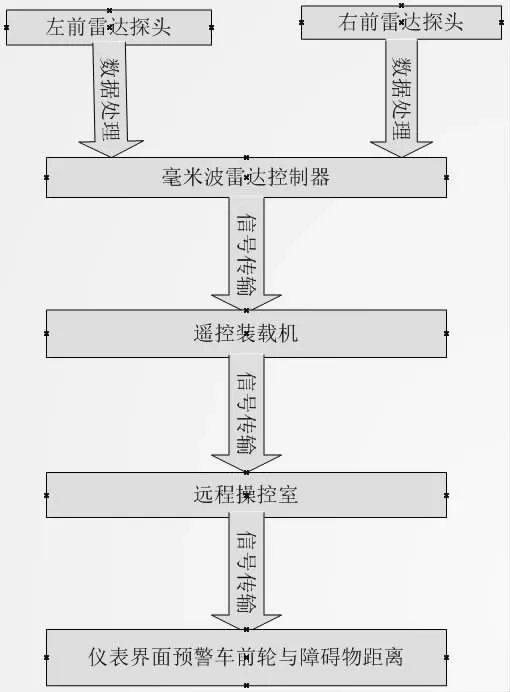
图1 遥控装载机前雷达防碰撞系统流程图
人在现场工作环境中可视范围广,看得清楚,此时事故不易发生,但在远程遥控台,由于摄像头可视范围受限,人眼观测距离感直线下降,这势必会造成视觉判断错误,极大地提高碰撞事故的发生概率。
2 遥控装载机前进装车防撞系统设计
2.1 遥控装载机前进装车防撞系统流程设计(见图1)
整个系统包括两个雷达探头模块、一个雷达控制器模块,该部分与装载机和远程操控台以及远程操控台上的仪表显示屏共同实现防碰撞预警功能。
2.2 毫米波雷达选型
与超声波雷达原理相比,毫米波雷达探测性能稳定,适合运用在复杂和恶劣工况下的主动防撞预警功能。因此,从安全可靠性、稳定性、可行性和成本等各方面考虑,采用AUTOSTAR 公司的G3-24G 型号的毫米波雷达来实现遥控装载机前进防碰撞预警系统。雷达主要性能参数,工作频率:24.00GHz~24.25GHz;最大可追踪目标数:32 个;水平探测角度:±45°@-6db/±75°@-10db;垂直探测角度:±15°@-6db/±22°@-10db;工作带宽:200MHz;探测能力:50m@RCS=10m^2 目标。

图2 右前和左前雷达安装位置图
3 毫米波雷达探头安装位置及报警定义
3.1 毫米波雷达探头安装位置
经过多次安装测试,最终选择安装在前左和前右车灯下方,距地面2.06 米高。探头支架与水平呈前倾19°夹角,这样可以避免动臂和铲斗在卸料点进行卸料时,雷达探测到装载机的工作装置,而出现错误的距离预警。(见图2)
3.2 毫米波雷达报警距离定义
毫米波雷达通过不断地发射雷达波束,对一个±45°(水平)×±15°(垂直)的圆锥形区域进行检测,在检测到范围内任何物体时均有距离报告。检测区域定义三个区域:红色区域、橙色区域和黄色区域。
Alarm(报警红色区):距离2 米内。当在红色区域雷达检测到障碍物时,远程操控台仪表显示装载机车前轮与障碍物的距离,并闪烁红字警示司机注意。
Warning(警告橙色区):距离2~5 米。当在橙色区域雷达检测到障碍物时,远程操控台仪表显示装载机车前轮与障碍物的距离并文字提示司机注意。
Info(提示黄色区):距离5~8 米。当在黄色区域雷达检测到障碍物时,远程操控台仪表显示装载机车前轮与障碍物的距离。
4 遥控装载机测距防碰撞系统程序实现
确定以上方案后,涉及到最重要的是对装载机和远程遥控台程序的更改,实现了遥控装载机前进行走防碰撞的保护,程序流程图见图3。
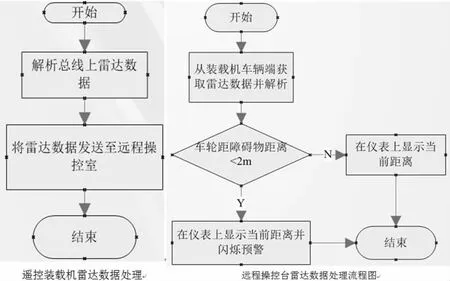
图3 程序流程图
5 遥控装载机测距防碰撞系统使用效果
加装雷达测距防撞系统后与原有的防撞系统配合更好地实现安全行走和装卸物料。经过雷达控制器处理,把8 个有效障碍物点发到总线上,再通过PCAN 画出曲线图(见图4),这8 个点中的最小值可以认为是装载机与卡车之间的最近距离。用测距仪测试装载机与卡车之间的距离(见图5),将雷达测距和测距仪测试的结果进行比较,连续监测测试,接收信号始终非常强烈而且稳定,并且误差都在±10cm 以内。
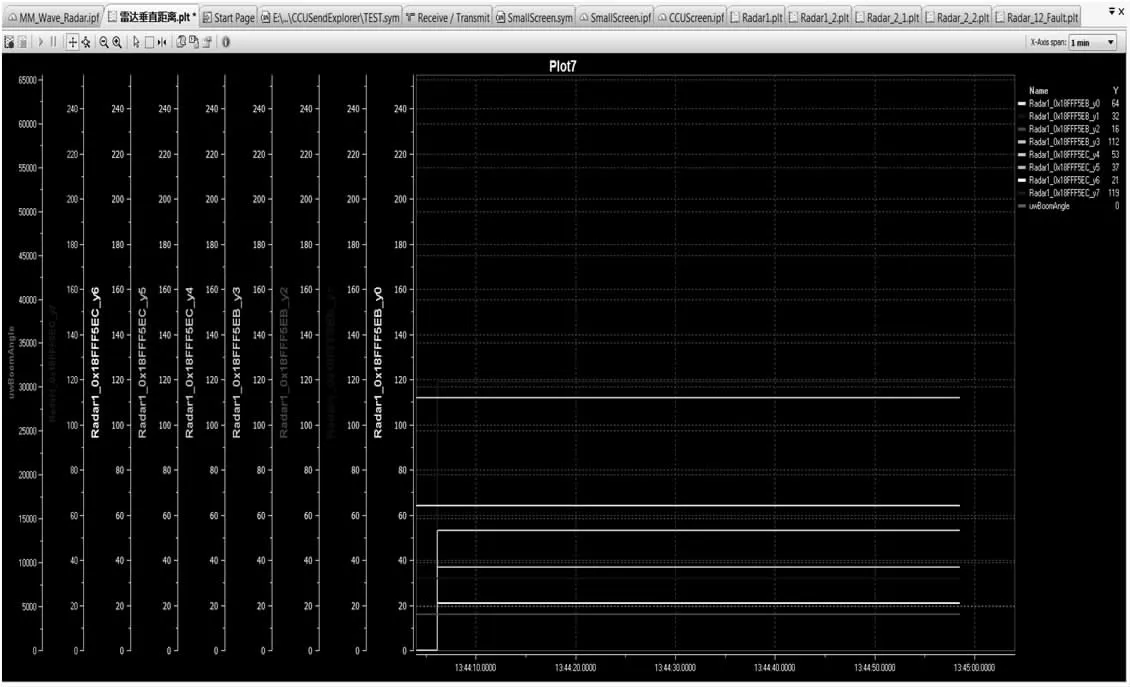
图4 有效障碍物点

图5 测距仪测试装载机与卡车的距离
自从安装该系统后,遥控装载机碰撞事故大大降低。该系统的工作状态良好,基本上没有任何误动作,满足可靠性和安全性的要求,也得到了客户的认可。
6 结论
在装载机安装雷达测距防撞装置实施中,我们创新地使用了雷达毫米波测距系统,充分发挥利器工作特性,增加其灵敏度及动作可靠性,并对控制程序做相应的改动,实现了装载机与卡车,以及装载机与其它障碍物的检测和防撞保护,极大提高了安全性,防止事故的发生。司机可以在远程遥控台通过视频画面的数据提示直观地看到装载机与卡车或障碍物之间的距离,从而更精准地进行装卸物料,可有效确保生产作业安全、提高卸料效率,为装卸流程的顺畅运行带来直接效益。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
科学(2020年3期)2020-01-06 04:02:51
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
电子制作(2017年7期)2017-06-05 09:36:13
中国公路(2017年13期)2017-02-06 03:16:33
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
