
基于UWB 的可穿戴式人员定位设备设计与研究
2021-05-25 10:04:00王喆周畅刁攀
科学技术创新 2021年11期
王喆 周畅 刁攀
(1、黑龙江省仪器仪表专业标准化技术委员会,黑龙江 哈尔滨150070 2、飞亚达精密科技股份有限公司,广东 深圳518057)3、哈尔滨工业大学仪器科学与工程学院,黑龙江 哈尔滨150001)
随着时代的发展,社会对于智能化生活生产的需求越来越高。人员定位目前有许多的方法,但是均具有较大局限。例如:WIFI 定位与蓝牙定位均采用RSSI 进行人员的距离估计。针对当前主流的人员定位系统的算法和产品缺陷,设计了一套基于UWB 技术的可穿戴式人员定位设备。该设备充分利用了UWB 信号的特点,结合到达时间测距、三边定位与小波去噪的算法,减小使用中的震动、多径对定位精度的影响,以实现室内环境下的人员精确定位。
1 系统设计原理
1.1 UWB 测距原理
对穿戴UWB 手表或头盔的人员进行精度较高的定位,首先要实现测距。测距方案有很多,包括大概四大种类:基于信号到达时间(Time Of Arrival, TOA)、基于信号到达时间差(Time Difference Of Arrival, TDOA)、基于信号衰减强度(Received Signal Strength, RSSI)、基于信号到达角度(Angle Of Arrival,AOA)。本文采用如下的双向双侧测距进行测距数据的采集。
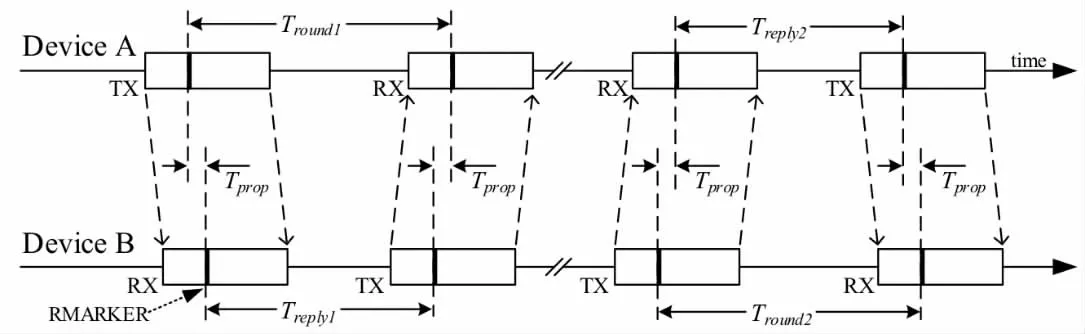
图1 双侧双向测距方案
双侧双向测距是由单侧双向测距演变而来的,该方法可以进一步的减少测距误差。它主要作用是消除同步时钟带来的限制。其示意图如图1。
其过程如下:设备A 发送一条信息,经过Tprop时间后,设备B 将接收到这条消息。再经过Treply1时间后,设备B 将发送一条回复信息,经过Tprop时间后,设备A 将接收到此条信息。之后一定时间后,设备A 会再次发送一则信息,同样经过Tprop后,设备B 会接收到这条信息。上图中,水平方向为时间方向,深颜色为DW1000 的接收与发送消息的时间戳。假设设备A 和设备B 之间没有相对运动,可以得到设备A 与设备B 之间得信息时间为Tprop,而此时为了减少误差,针对Tprop算法才是关键的。式子如下所示:

双向双侧测距不需要两个设备之间进行时钟同步,它的噪声来源是射频芯片的时间戳精度、多径影响、非数据影响,适合应用于工业环境中。
1.2 UWB 三边定位原理
三边定位,即是利用三条边长度(实际中对应为节点与标定点的距离)进行定位,也是本系统采取的定位方式。
x1,2,3,y1,2,3分别代表基站的坐标位置,x,y 分别代表标签的位置坐标,d0.1,0.2,0.3代表标签与各个基站的距离,这个距离值由UWB的硬件设备测得,并会由基站汇总,测距方式采用上一节提到的TOA。可联立式子:
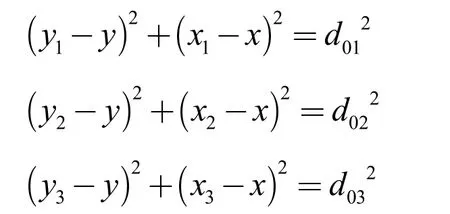
在基站上求解以上的式子,可以解出标签的具体坐标与位置。当然,这只是最理想的情况,在实际应用中,由于测距的波动,坐标的位置是一个模糊的区域而非定解,本文再次利用小波对结果进行降噪,以获取更加稳定、精度更高的数据。
1.3 小波数据滤波原理
设有如下观测信号

小波变换在降噪方面有如下特点:(1)小波变换是一种时频局部化分析方法,即在低频部分具有较高的频率分辨率和较低的时间分辨率,而在高频部分具有较高的时间分辨率和较低的频率分辨率,适合室内测距与定位信号中包含的震动噪声、多径噪声并展示其成份。(2)零均值白噪声序列在小波变换下仍为零均值序列,并且在小波基下的系数序列仍为同方差白噪声序列。(3)在含噪测距数据小波变换域中,测距信号的能量绝大部分集中在绝对值较大的小波系数中,噪声成份能量则主要集中在绝对值较小的小波系数中。通过设定一个阈值,将低于某个阈值的小波系数置为零,而保存高于阈值的小波系数,经过处理之后的小波系数就可以理解为基本上是由信号引起的,从而去除测距信号中的震动与多径干扰。
2 系统功能与实现
2.1 系统功能组成
该系统主要由标签、基站、还有上位机组成,其中标签进行可穿戴设计,将佩戴在需要定位的人员身上。基站固定在建筑物上,作为定位结算的基准站,上位机可以查看基站的数据,以实时掌握人员的定位数据。可穿戴式标签的主控芯片是整个定位系统实现算力的硬件设备,本设备采用STM32 平台进行芯片控制,STM32 是ST 公司推出的微控制器,采用Cortex-M3 内核、ARM-V7 架构。在UWB 射频芯片上,采用DW1000 芯片,DW1000 芯片是遵守IEEE802.15.4-2011 电气规则的低功耗低成本UWB 通信芯片。它广泛应用于测距与定位领域,其极限的精度可以达到10cm。其原理图如图2 所示:
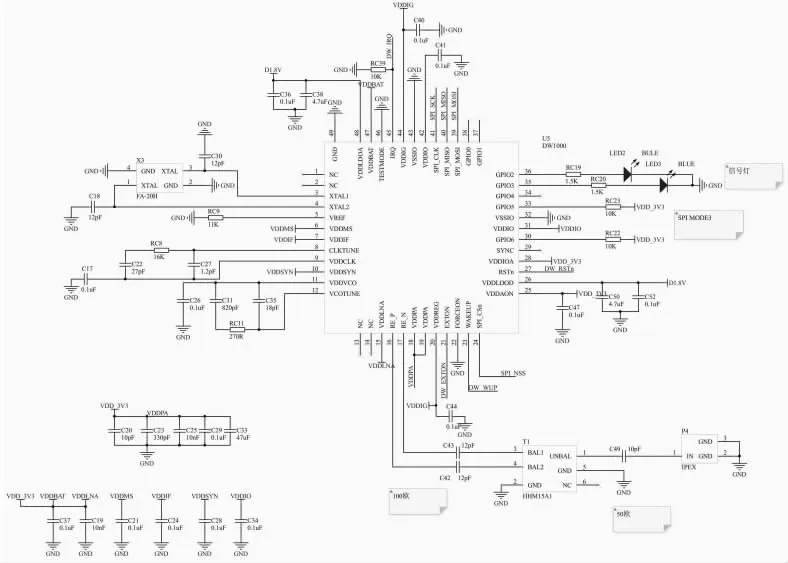
图2 硬件电路方案
为了实现可穿戴,需要缩小设备体积,本文将DW1000 与STM32 集成到一块小型的电路板上,该电路板长6cm,宽3 厘米,可以直接集成到安全头盔的顶部方便进行穿戴。同时还进行了手表式的硬件电路板设计,将上述电路板中的器件分布在板的两侧,最终使得电路板的体积进一步缩小,可以嵌入手表的表盘中,直接佩戴在人员手上。基站则采用正常体积设计,并且使用吸顶天线以扩大信号的覆盖范围。(图3)

图3 硬件电路与外形方案图
2.2 系统代码实现
本文所述系统的软件部分细分为三个部分,分别是:基站代码、标签代码、上位机代码。基站代码将在四个基站的硬件上运行,执行基站设定的程序,及时接收标签的poll 信息帧、回复response 信息帧,并及时处理final 信息帧,基站最终会得出标签的定位结果;标签代码将在标签硬件上运行,标签首先的任务是发送poll 信息帧,然后就是等待response 的到来,并开始发送final 信息,标签会配合基站通过UWB 信号进行交互信息;上位机代码将会运行形成一个上位机,该上位机用于显示接收基站的定位结果,并进行一系列的可视化实现。基站代码的运行流程如图4 所示。
2.3 系统上位机处理
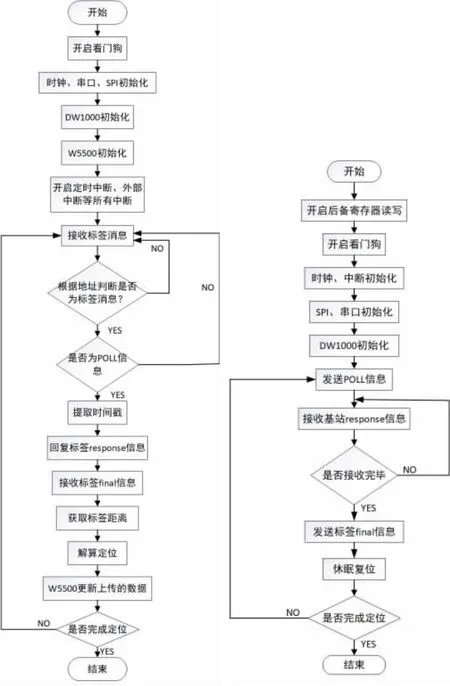
图4 基站与标签程序运行流程图
使用QT Creater 进行QT 上位机的开发,上位机运行采用信号与槽的机制,兼容Windows、Linux/X11、Mac OS X 等操作系统。QT Creater 的开发界面简单,主要包括代码编辑器、编译器、以及一个可视化调试工具和外形设计师QT Designer。本文在QT 5.6.3 版本上进行上位机制作,力求软件稳定可靠。上位机程序使用QWidget 生成文件框界面,把数据当成功能,在QWidget上进行显示输出出来。为了实现任务框的多个切换,还使用了标签专属控件。
3 功能测试与分析
本文进行了一组模拟室内UWB 标签电路板定位的实验,在此次实验中,使用一个UWB 标签与四个UWB 基站来进行测距与定位实验。四个基站固定在四个位置,标签固定在多个点,并在各自的位置上进行一定程度的晃动,可以得到一组晃动不光滑的曲线,以此模拟标签佩戴在人员身上的摇晃震动。其测试图如图5 所示。

图5 实际测试图
由于标签情况类似,本文将标签0 号的结果进行展示处理。采集到的标签0 的x 轴和y 轴坐标如图6、7 所示,图中浅色是采集到的原始数据,深色是降噪去除震动后的坐标数据。

图6 定位结果降噪图(y 轴)
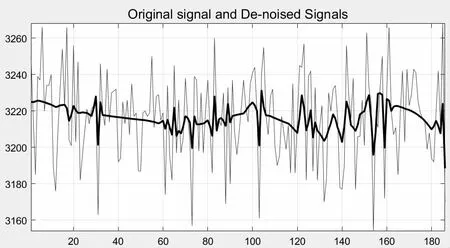
图7 定位结果降噪图(x 轴)
可以看到这时候的标签的位置已经较为稳定的在3220 附近波动,与真实x 坐标3200 接近,相比浅色结果,有了更高的稳定性和精度。同理,y 轴也具有同样的效果。
4 结论
本文研究了一种便携可穿戴式UWB 设备,将该设备应用到人员跟踪、定位、监视的实际场景中,不仅可以降低人员定位的成本,还能有效提升人员的定位精度与实时性。设备采用TOF分析方法实现对于人员与基站之间的厘米级测距,并利用三边定位算法解算出人员相对于基站的高精度坐标位置,同时本文提出的一种基于小波变换的降噪方法可在滤除误差干扰的同时保留了几乎全部的基本测距信息以及大部分的细节信息,在一定程度上明显地改善了UWB 测距和定位数据质量。该套可穿戴UWB 设备具有受环境影响小、定位测距精度高、天线关联少等优点,且无需时间同步。通过实验,验证了基于可穿戴UWB技术的人员定位系统可实现基站覆盖范围内人员厘米级精确定位,可以促进工业厂房、矿井、养老院等地的数字化建设水平,提高使用单位的管理效率。
猜你喜欢
科技风(2021年19期)2021-09-07 14:04:29
电子制作(2019年13期)2020-01-14 03:15:32
科学(2020年3期)2020-01-06 04:02:51
车迷(2018年12期)2018-07-26 00:42:22
制造技术与机床(2017年10期)2017-11-28 05:20:43
电子制作(2017年7期)2017-06-05 09:36:13
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
学习月刊(2015年3期)2015-07-09 03:51:04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
