基于深度学习的多源数据融合下的汽渡防碰撞预警方法∗
2021-05-25 02:54
舰船电子工程 2021年4期
(江苏科技大学计算机学院 镇江 212003)
1 引言
镇扬汽渡作为江苏省南北交通干线公路243省道的越江枢纽,是长江沿线安全、快捷、优质、畅通的现代化渡口,为长江镇扬通道的畅通、镇扬两市的经济发展、江苏交通事业的振兴和国防交通战备做出了积极的贡献。近年来,伴随着长江流域经济的快速发展,该流域的水路运输业务也变得愈加繁忙,航行于东西方向的船舶的数量激增。镇扬汽渡来往于镇江和扬州之间,属于南北航向,与水路运输船舶交叉碰撞概率急剧上升,轮渡的航行安全问题也变得愈加严峻[1]。
汽渡搭载了船用雷达与船用自动自动识别系统(AIS)。船用雷达可以对船舶进行精确定位,而且观测距离远,分辨率高,不受气候和白昼的影响。但是雷达不能绕过障碍物测量,测量信号容易受到江浪和雨雪等环境因干扰。船用自动识别系统(AIS)是一种现代化船舶导航定位技术,它提供了于船舶航行有关的各种关键信息,包括船名、航速、航向、经纬度、危险等级等重要信息。但是AIS会受到GPS信号影响,数据更新不及时,出现错误的船位、航向以及航速等[2]。所以当下,汽渡驾驶员在愈加复杂的航行环境下,根据雷达或者AIS反馈的周围船舶情况,再依靠自己的经验判断来进行安全省心的驾驶变得越发困难。
现阶段,船舶避碰的解决方案大致可以分为船位预测和主动避碰两大类。船位预测是通过一些算法或者神经网络,根据船舶的历史航行数据预测出大致的航迹;主动避碰是通过在船舶上配备相应的防撞硬件,如防撞气囊模块、激光测距设备等[3]。真实情况下,这两类都是必不可好少。本文将从船舶航迹预测角度提高汽渡的航行安全性。
在船舶航迹预测领域,李兴海建立船舶的运动数学模型并结合全球定位系统GPS,通过分析和计算船舶起点的经纬度、航向、航行速度等,获得船舶到达下一位的航迹参数[4]。徐铁等采用卡尔曼滤波算法对AIS数据进行修正,并利用最小二乘法做AIS节点数据估计,最后对预测结果进行平滑处理,得到了与真实数据比较接近的船舶航迹[5]。甄荣等通过基于BP神经网络的船舶航行动态预测模型,实现多维的船舶航行特征参数的预测,预测结果较好[6]。
目前,深度学习在国内外各个领域均有非常广泛的应用。而深度学习当中的长短期记忆网络(LSTM)模型在处理和时间序列分析预测方面表现出了非常好的效果。林杰等[7]利用LSTM网络提出了一种股价趋势预测方法,引入股票离散型趋势数据到预测模型中,能够在已有交易数据和技术指标的基础上提升股价预测精确度;楚翔皓等[8]将LSTM神经网络对SQL语义进行分类学习,可以精确识别攻击语句,且不容易产生误判行为;SALMAN等[9]将LSTM网络应用到了航行天气变化预测领域,能够有效的预测未来的天气变化情况;WEN等[10]利用LSTM神经网络预测空气污染,其结果显示,空气污染的预测结果与真实的污染数据相近。
受到以上启示,本文提出了一种基于深度学习的多源数据融合下的汽渡防碰撞预警方法。该方法首先雷达与AIS船舶航行数据融合,以此来获得更加可靠,准确的训练数据;再将融合后数据转换为离散的位置序列作为输入;其次,抽取船舶行航行的时空多维特征;最后采用卷积神经网络和深度双向LSTM网络,学习船舶航行轨迹的局部和全局特征。
2 雷达与AIS数据融合
2.1 空间统一
雷达的观测数据是以极坐标的形式表示的,而AIS数据是由AIS系统中GPS提供的基于WGS-84地理坐标系经纬度表示的。空间统一就是要将雷达和AIS数据统一变换到直角坐标系中,且坐标原点定义为和船舶实际位置,这样便于对雷达和AIS两者的数据进行关联和融合。
1)雷达坐标变换
雷达提供的船舶位置数据是基于极坐标下表示的,其数据具体表示为距离R和方位θ,将去转换到直角坐标系下的数据用XR和YR表示[11],转换参考式(1):

2)AIS坐标变换
本文利用高斯-克吕格投影[12]将AIS提供的船舶位置数据由球坐标系转换到直角坐标系下。
高斯-克吕格投影是一种等角横轴切椭圆柱投影。这种投影,将中央经线投影为直线,其长度没有变形,与球面实际长度相等,其余经线为向极点收敛的弧线,距中央经线越远,变形越大。
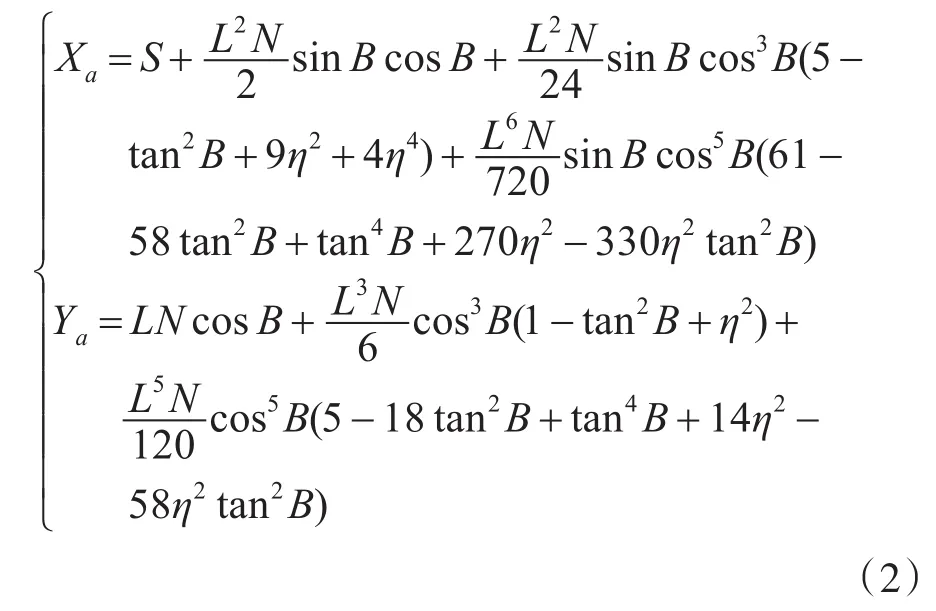
式(2)中,Xα和Yα为AIS数据在直角坐标下的横坐标和纵坐标,L是地理坐标下的经度值,S是赤道至纬度B的子午线弧长;N是纬度B处的卯酉圈曲率半径,B是地理坐标系下的纬度值;。
此时,转换后的AIS数据以直角坐标系表示。
3)脏数据过滤
雷达的测量信号容易受到江浪和雨雪等环境因素干扰,AIS会受到GPS信号不稳定影响接收的船舶数据不准确。脏数据即为不符合数据分布统计规律的异常值,是不符合实际工程情况的,也可成为“异常值”。此类数据对深度学习训练精度产生影响,所以在融合数据之前,须将此类过滤,减小训练数据集体积,同时提高训练精度和效率。
2.2 时间同步
在对雷达与AIS数据做航迹关联时,只有在同一时刻下才能有效地关联出航迹信息。而雷达与AIS的数据采样周期不同,所以在数据融合时,需要将两者的数据在时间上进行同步化,本文将采用内插外推法进行时间同步[13]。
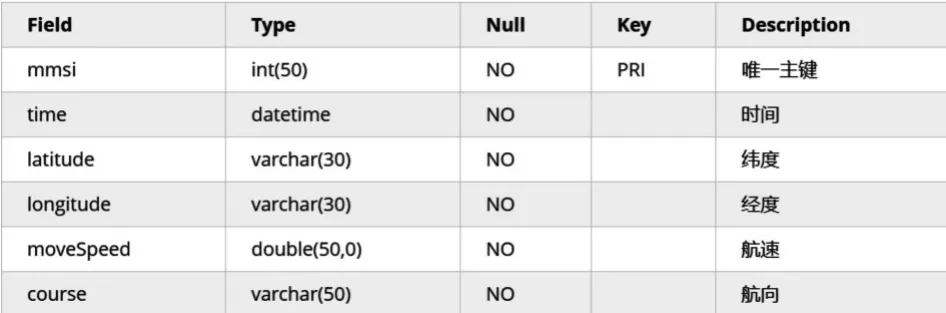
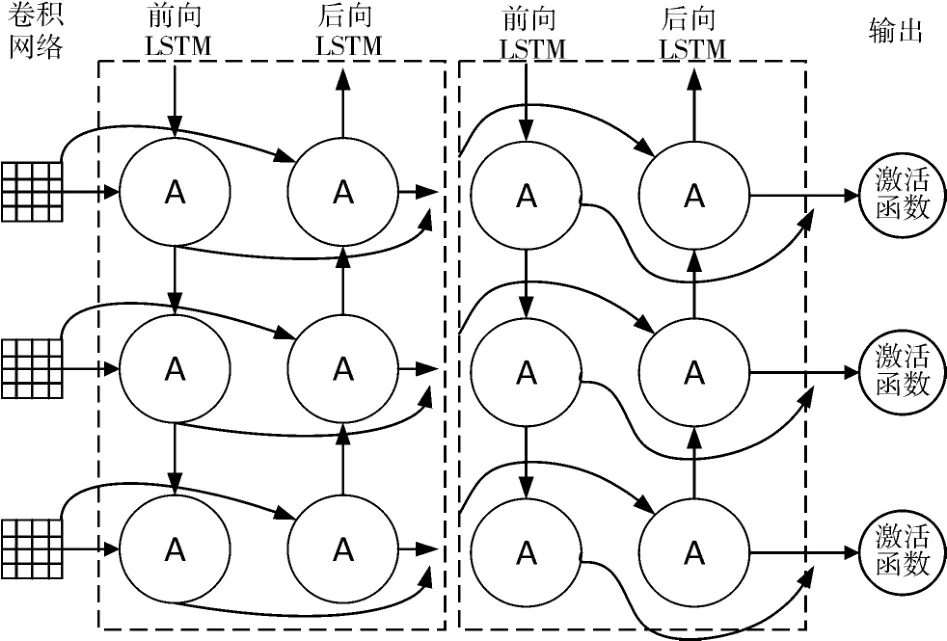
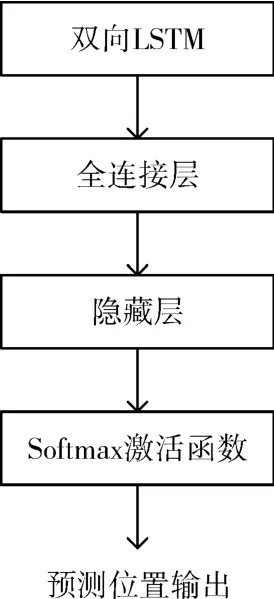
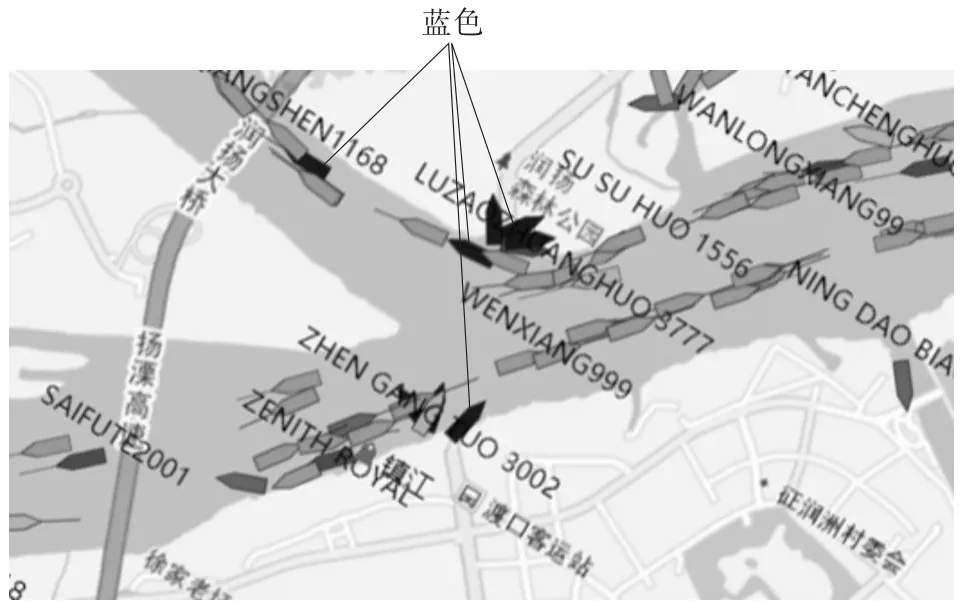
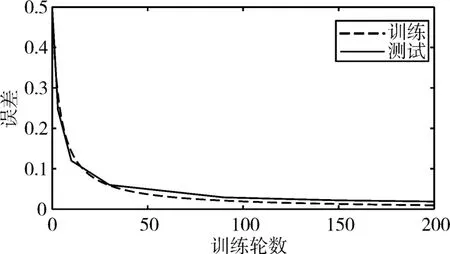
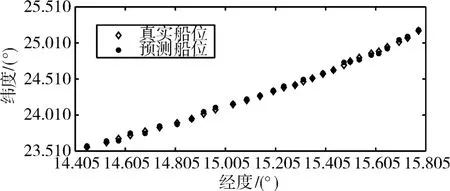
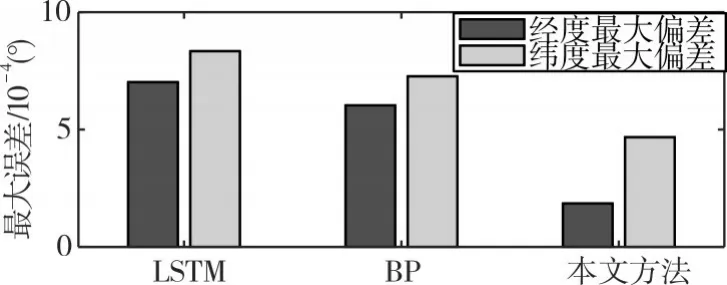
汽渡搭载的雷达刷新周期一般是2s左右,而AIS的数据更新周期不固定,它受汽渡的航速和航向决定,一般在2s~5min之间。假设雷达对目标船舶的探测时间为t,AIS的采样周期为T,AIS第nT和第(n+1)T个时刻雷达有探测值,且nT 通过式(3),可以将AIS的数据外推到雷达的探测时刻t上,完成时间的同步。由于船舶的机动性相对比较迟缓,采用该方法可以满足精度需求。 汽渡搭载的雷达可以探测100余艘船舶,而AIS的一个信道可以接收400多艘船舶的信息,所以需要将两者的航迹进行空间粗关联,从而减小计算量,降低计算复杂度。 假设AIS目标船舶在Ti(1≤i≤m,m为AIS目标的点迹数)的坐标为,雷达目标船舶j(1≤j≤n,n为雷达目标数)在时刻Ti的坐标为,则在时刻Ti雷达目标j与AIS目标的空间距离distance为 1)若distance≤R(阈值),则时刻Ti的雷达目标与j与AIS的目标相关联。 2)否则,不关联。 空间粗关联之后,进行航迹关联。将连续S(1≤S≤m)个时刻的AIS目标航迹分别于目标航迹进行粗关联。如果雷达目标在T(T≤S)时刻的空间粗关联都与AIS目标关联,则AIS目标与雷达目标为航迹关联。 航迹融合就是将雷达与AIS的航迹经过一定的算法对数据进行融合处理,使得融合后的数据集精度更高,更加接近于船舶的真实航迹。航迹融合分为如下两种情况。 1)如果雷达与AIS的目标距离相近,AIS的航迹数据就可以满足训练需求。此时,直接将AIS的航迹数据作为融合之后的训练数据集。 2)如果雷达与AIS的目标相距较远。如果雷达与AIS的航迹点欧氏距离大于150m,方位差欧式距离大于5°,航速差欧式距离大于1.2,航速差欧式距离大于3°,设AIS加权权重为1,则将AIS航迹点作为融合时刻点。 假设在系统k时刻,雷达的测量值为xR,AIS的测量值为xA,且两者相互独立。雷达的测量均方误差为,加全因子为wR;AIS的测量均方误差为,加全因子为wA。设X为雷达与AIS数据融合之后的航迹信息。如上所述,可得式(5): 融合后的数据使用MMSI(水上移动通信业务标识码)作为某一条目标船舶航迹数据的唯一标识符,与MMSI相对应的目标船舶动态序列的相关字段如图1所示。 图1 船舶动态序列字段图 本文通过深度学习的架构建立算法模型,其中主要包含两个船舶航迹特征学习模块,多层卷积神经网络模块和深度双向长短期记忆网络模块。这两个模块的功能各异,可以形成优势互补,完成了船舶航迹的特征挖掘,充分学习轨迹各个特征的规律。 在解决分类预测问题上,卷积神经网络构造特征工程具有非常广泛的应用。本文将使用卷积神经网络充分提取每个目标船舶的航迹特征,对其进行分类,提高深度学习训练效率。 首先使用嵌入层将目标船舶轨迹数据中相关的时间、航向转换为嵌入空间中的特征向量,然后采用连接层,对轨迹的空间位置、时间、航向、航速等特征融合。建立多重卷积神经网络模型,每层神经网络的神经元将对这些特征进行提取。 经过卷积神经网络对这些输入的轨迹特征进行训练后,建立基于目标船舶轨迹的特征工程使得模型提取到每条轨迹的新特征。 使用深度双向LSTM继续对经过卷积神经网络处理过的轨迹新特征,对相对近期数据和远期数据进行处理编码。构建多层模型,学习输入特征和输出特征之间的关系,充分学习到位置之间的语义关系和时序依赖信息。 首先通过设置屏蔽层,还原目标船舶轨迹序列不固长的属性,去除在模型初始化时的轨迹序列中的填充值,使其符合目标船舶轨迹的变长序列。LSTM通常被应用在处理长期状态的时间序列,把近期和远期的船舶航迹数据作为输入训练集,可以提高位置预测的精确性。 图2介绍了深度双向LSTM模块的体系结构,每一个神经元都有一个前向LSTM和一个后向LSTM组成。前向LSTM会从左到右处理输入向量,而后向LSTM会以相反的顺序处理。通过前后双向反馈对目标船舶轨迹规律充分学习,从而获得最终的位置向量特征。 图2 深度双向LSTM体系结构 如图3所示,本文采用的目标船舶位置预测实质为一个分类器,其中的类别是候选位置集,即实际目标船舶的经纬度位置索引。在算法输入时,已经将候选位置集进行向量处理。 图3 预测位置输出模块 经过深度双向LSTM对目标船舶轨迹的特征学习之后,获得最终的向量特征,再通过全连接层计算出预测的下一位置向量。最后,位置索引匹配真实的经纬度信息,实现目标船舶的位置预测。 本文数据集选取图4所示镇扬汽渡所在蓝色区域的航速在0~14kn的船舶AIS数据,并且AIS的数据接收时间间隔为10s。训练集使用的雷达数据均来自于2036号汽渡,船名为“JIANGSULU⁃DU3015”,MMSI为413798958,呼号为ZYQD15,长宽高为90×16×N/A m。 图4 镇扬汽渡航道示意图 本文实验均运行于个人PC,具体配置如下。 机器型号:Lenovo Y7000P-1060; 系统类型:Ubuntu 18.04桌面版; 显卡版本:NVIDIA GeForce GTX 1060; CPU处理器:Intel(R)Core(TM)i7-8750H CPU@2.20GHz 2.21GHz; 内存容量:16GB RAM。 本文将使用Python 3.5编程语言实现,过程中需要依赖第三方Python库Numpy1.10.1,Scipy和TensorFlow 1.3.0,Keras 2.0.9。 本实验中涉及到的参数初始化: 1)学习率(Learning Rate):指神经网络中随时间推移,信息累计的速度,初始化为0.2。 2)权重(Weight):衰减权重系数为0.0001,更新权重为0.1,更新权重的衰减系统为0.0002。 3)层数(The Number of Layers):指神经网络模型的训练深度,模型结构的复杂度与计算量和该参数成正比,本文将层数初始化为10000。 4)批尺寸(Batch Size):采用批梯度下降法,可以解决局部优化问题,选择合适的批尺寸可以提高模型的效率。Batch批训练大小初始化为100。 5)训练轮数(Epoch):指模型需要对训练学习的周期,训练轮数与批尺寸成反比,我们将其初始化为200。 6)过拟合(Over Fitting):训练轮数过大,得到的结果则会过于泛化。可尝试增加训练数据的同时降低神经网络模型的复杂度。 选取200组连续的雷达与AIS融合数据进行实验,时间间隔为10s。从图5可以看出,随着训练轮数增加,误差曲线逐渐趋于平稳,训练效果很好。 图5 航迹预测 如图6所示,该方法的经纬度预测效果较好,预测准确率可以达到96%左右。选取传统LSTM模型和BP神经网络进行对比,其中BP神经网络的训练层数初始化为4。且输入层、隐含层1、隐含层2、输出层维数分别为4、50、10、2,使用同样的数据进行训练。如图8所示,较LSTM网络,经度最大误差降低了约5×10-4°,纬度最大误差降低了约3×10-4°;较BP神经网络,经度最大误差下降了约4×10-4°,纬度最大误差下降了约 2×10-4°。 图6 经纬度预测 图7 误差对比 本文提出的这种基于深度学习的多数据融合下的轮渡船舶防碰撞预警方法,通过将雷达与AIS数据融合,提高深度学习训练数据集经度,再利用卷积神经网络和深度双向长短期记忆网络的优势,充分学习船舶航迹局部和全局特征。相比于传统的BP神经网络和LSTM网络,可以更好地预测船舶航迹。在下一步的研究当中,结合汽渡本身特有的航行轨迹与特点,让碰撞危险系数和预测碰撞位置可视化。
2.3 航迹关联

2.4 航迹融合

3 深度学习算法模型
3.1 卷积神经网络模块
3.2 深度双向LSTM模块
4 实验和结果分析
4.1 实验平台与数据集
4.2 实验相关参数选择
4.3 实验与结果分析
5 结语
猜你喜欢
车主之友(2022年4期)2022-11-25
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
军民两用技术与产品(2022年5期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
煤气与热力(2022年2期)2022-03-09
北京航空航天大学学报(2021年4期)2021-11-24
软件(2017年6期)2017-09-23