
一种新型遥控式阵列定位及生命探测装置
2021-05-24 10:33王彩霞田杨萌杨思琪
物联网技术 2021年5期
叶 倩,王彩霞,田杨萌,杨思琪,刘 琳
(北京信息科技大学 理学院,北京 100192)
0 引 言
火灾是自然灾害与社会灾害中发生概率最高的一种灾害,火灾发生地由于建筑、物质、火源的多样性与人员复杂性,消防条件和气候条件的差异性,使得灾害发生发展过程中的救援变得极为复杂[1]。对于有遮挡物或在严重影响视线的环境条件下,给身处危险之中的人员施救造成了很大的障碍。以往的生命探测仪大部分需要手持,探测距离受限,探测效率低下。普遍使用的雷达探测仪虽会对探测区域进行扫描,但在有障碍物的情况下,很难做到全方位无死角探测。因此,研究能够在视线差、干扰多、探测距离受限等恶劣环境下的探测装置来实现简单、有效、快速的定位非常必要。
音频定位技术主要基于麦克风阵列[2]的应用,采用固定排列的麦克风阵列获取声音信号,然后通过特定算法进行数据处理,最终得到所需信息。基于麦克风阵列的音频定位方法目前主要分为基于高分辨率谱的定位方法,最大输出功率的可控波束形成定位方法[3],基于信号到达各麦克风的时间延迟(Time Different of Arrival, TDOA)估计定位方法。波束形成算法因其远场测量精度优势而被广泛应用。相比TDOA技术,波束形成算法基于阵列传感器上各阵元接收的信号,算法为阵列输出选择适当的加权矢量以补偿每个阵列元素的传播延迟,使得阵列输出可以在某个期望方向上以相同方向叠加,从而实现对原始信号的方向定位,具有更好的精度和适用范围,使阵列在该方向产生主瓣束,并在某个方向对干扰进行一定程度的抑制[4]。
本设计利用运动音频传感器阵列获取音频信号,通过捷联惯导系统获取音频传感器阵列的运动轨迹及变化速度,结合坐标变换并基于麦克风阵列的波束形成声源定位[5]算法计算声源位置,并基于物联网技术实现实时搜救。
1 探测原理
1.1 阵列及波束形成简介
波束形成又被称为空域滤波。波束形成[6]是根据声源物理位置来区分信号的最简单方法,被广泛用于定向传输或接收信号领域。波束形成算法为阵列输出选择适当的加权矢量以补偿每个阵列元素的传播延迟,使得阵列输出可以在某个期望方向上以相同方向叠加,并在某个方向对干扰进行一定程度的抑制。对各阵元输出信号加权求和、滤波,最终输出期望方向的语音信号,相当于形成一个“波束”[7]。波束形成器的基本系统模型如图1所示。尽管阵列的各阵元为全向同性阵元,但对阵列输出进行加权求和处理后,可使某个方向的信号同相相加,即将天线阵列波束“导向”该方向,获得最大的输出增益。
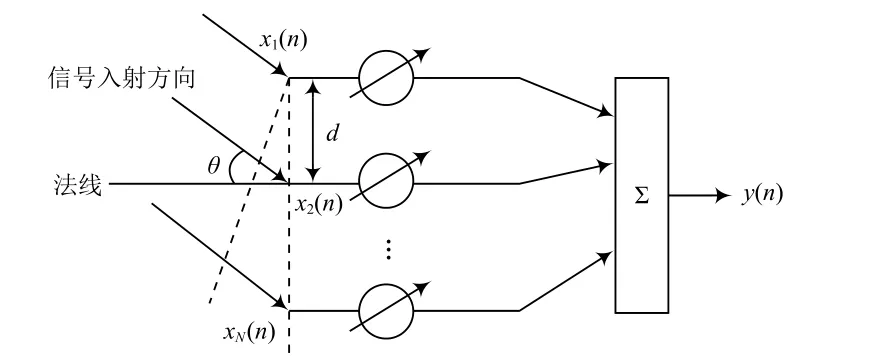
图1 波束形成基本系统模型
目前,根据波束形成的权系数与阵列接收信号是否有关将波束形成主要分为两类,一类是固定波束形成算法,如延迟相加波束形成算法,它的波束形成的权系数与阵列接收信号无关;另一类是自适应波束形成算法,如基于广义旁瓣抵消(GSC)结构和线性约束最小方差(LCMV)结构的自适应波束形成算法,它的波束形成的权系数与阵列接收信号相关。
对于固定波束形成,最常用的也是最传统的方法,即延迟相加波束形成算法。由于麦克风阵列中每个麦克风的位置不同,因此接收到语音信号的时间不同,选定一个麦克风作为参考麦克风,计算出目标声源到达参考麦克风的时间,然后计算其他通道(即麦克风阵列阵元)相对于此参考麦克风的时延,通过时间补偿使各通道的语音信号同步,将各通道的信号相加,使目标方向的信号同相叠加得到增强,等效于阵列波束图的主瓣对准目标方向,其他方向相比于主瓣方向均有不同程度的削弱。
1.2 阵列声定位算法
如图2所示,以均匀线性阵列为例,设有M个阵元,信号到达方向为θ,目标信号为s(t),则第M个阵元相对参考麦克风接收到的信号为s(t-τm),傅里叶变换如下:

麦克风阵列接收的信号可以表示为:
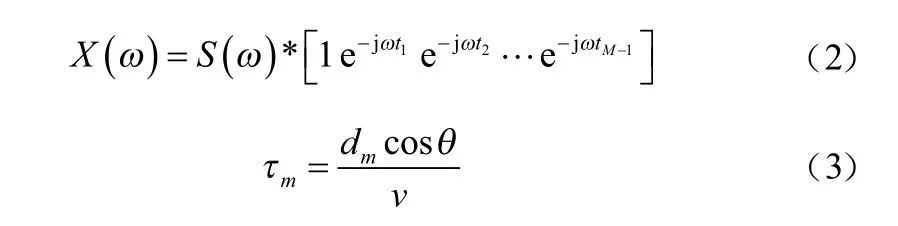
式中:τm表示麦克风阵列的阵元m相对于参考阵元接收到的语音信号时间差;dm表示阵元m相对参考麦克风间的距离;ω为接收信号的载波角频率;v为声速。

式中,W(θ)为阵元的响应矢量。在延迟相加算法中,每个阵元的权值为该阵元相对参考阵元需要补偿的相位延迟,即阵元响应向量的共轭转置。
因此,麦克风阵列的输出信号可表示为:

式中:M个阵元为M个通道;WH为W矩阵的共轭转置;n为阵列间距个数。将每个通道的数据乘以其相应的权系数再相加。利用自适应波束成形算法求得的权矢量为:

经过自适应波束成形算法处理后的语音信号的输出数据为[8]:

输出的阵列方向图为:

式中,a(θ)为阵列的导向矢量。
权矢量不同,阵列信号经波束形成器后的输出也不同,所以自适应波束形成的目的是选择最优权,使波束形成器的信噪比达到最大。
1.3 声源定位算法中运动阵列坐标变换
传统的阵列一般采用固定的麦克风音频阵列定位移动的声源,或采用移动的麦克风阵列定位静止的声源,但算法不能直接使用,需要进行坐标转换,使其相对坐标转化为以往的常规坐标,之后再通过捷联惯导系统采集无人机的坐标。音频传感器阵列安装在无人机上,采集的无人机坐标即为音频传感器阵列的坐标。将音频传感器阵列关联至捷联惯导系统,用于测定运动中的音频传感器阵列的运动轨迹及速度变化。
得到音频传感器阵列的坐标后,采用三维转换方法进行坐标转换,利用公共点,即同时具有WGS84直角坐标和地方坐标的直角坐标的点位,一般需要3个以上重合点,通过布尔莎模型或其他模型计算,得到从一个系统转换到另一个系统的平移参数、旋转参数和比例因子。具体包括计算公共点的重心、推算 WGS84 与地方椭球间的平移参数、地图投影应用于 WGS84 坐标点、确定二维转换参数、建立高程插值模型。首先搜集应用区域内GPS“B”级网3个以上网点WGS84坐标系B、L、H值,及我国坐标系B、L、h、x值(B、L、H分别为大地坐标系中的大地纬度、大地经度及大地高,h、x分别为大地坐标系中的高程及高程异常,N为该点的卯酉圈曲率半径,e为椭球第一偏心率,A为椭球长半径。各参数可以通过各省级测绘局或测绘院具有“A”级、“B”级网的单位获得)。计算不同坐标系三维直角坐标值,计算公式如下:
2 生命探测装置系统设计
本研究设计了一种遥控式生命探测装置,以解决现有技术中生命探测仪使用场景受限、探测效率低下的问题。此设计的技术关键点如下:
(1)音频传感器阵列是运动的、可遥控的;
(2)阵列定位算法是本研究的关键,该技术基于目前的波束形成算法,经过运动和静止坐标系的转换实现运动阵列定位的结果显示;
(3)使用捷联惯导系统测量阵列的运动轨迹及其速度;
(4)定位系统采用GMS传送数据到云平台,使用物联网技术实现数据和信息的交互和共享。
此设计将阵列固定在无人机上,通过控制无人机的航线实现音频传感器阵列的运动,利用运动的音频传感器阵列拾取静止的待搜救人员的音频信号,使用单片机进行音频信号的处理和采集,利用GSM技术实现相对远距离的数据传输,利用三维坐标转换实现音频传感器阵列和声源的坐标转换,以适应现有算法,并实现对静止待搜救人员的定位。该生命探测仪能够被方便、快捷地投放到待测目标区域,并最大限度利用火灾现场上部有利空间进行探测,根据需要随时改变或调整搜救范围,解决因障碍物遮挡带来的定位盲区与探测距离远等问题,生命定位搜寻功能更优。
2.1 系统整体框架
本系统主要由控制器、无人机、音频传感器阵列、信号处理及采集模块和数据传输模块构成,系统结构如图2所示。

图2 音频探测系统设计流程
该装置包括控制器、无人机、音频传感器阵列、信号处理及采集模块、数据传输模块和PC端。控制器用于根据PC端的控制信号控制无人机的飞行航向,实现在复杂环境下的无人机搜救工作。音频传感器阵列安装在无人机上,与信号处理及采集模块连接。信号处理及采集模块和数据传输模块连接,数据传输模块通过云平台与PC端进行数据传输。
此控制器可通过无线通信技术实现与PC端的通信,以及对无人机的控制,有助于无人机在复杂环境下开展搜救工作,如搜救火灾现场被困人员,在大雾弥漫的深山中搜救迷路游客,在雨雪天气对身处其中的人员精准定位并施救,抓捕躲藏在有遮挡物空间的逃犯或犯罪嫌疑人等。
2.2 系统信号处理
音频传感器阵列拾取的信号为模拟信号,而单音频传感器只有信号拾取功能,能够识别信号但无信号采集功能,因此需要借助具有模数转换功能的信号处理及采集模块。信号采集部分使用具有高性能、低功耗的STM32F407系列单片机。
本设计选取的STM32是Cortex_M4最高168 MHz主频带DSP,外围设备的扩充量较强,GPIO的功能选择和精度较高。在STM32单片机外设接GMS模块以搭建云平台。STM32系列单片机内置3个ADC控制器,可独立使用,通过使用双重/三重模式提高采样率,具有体积小、易操作、便携带等优点。
2.3 无人机的捷联惯导系统
2.3.1 无人机应用现状及机体坐标系选取
自20世纪60年代开始,对无人机的研究多以靶机和民用无人机为对象[9]。近年来,我国无人机在飞控系统、语音传输、组合导航、图像拍摄、传感器等诸多技术领域积累了丰富经验,故利用无人机能够解决现有技术中生命探测仪使用场景受限、探测效率低的问题。
2.3.2 捷联惯导系统及其应用
捷联惯导系统是一种无框架系统,由3个速率陀螺、3个线加速度计和微型计算机组成,能精确提供载体的姿态、地速、经纬度等导航参数[10]。对捷联惯导系统而言,平台的作用和概念体现在计算机中,它是写在计算机中的方向余弦阵。直接安装在载体上的惯性元件测得相对惯性空间的加速度和角加速度均为沿载体轴的分量,将这些分量经过坐标转换方向余弦阵后转换为要求的计算机坐标系内的分量。如果该矩阵可以描述载体和地理坐标系间的关系,那么载体坐标系测得的相对惯性空间的加速度和角速度经转换后便可得到沿地理坐标系的加速度和角速度分量,导航计算机便可根据相应的力学方程求解要求的导航和姿态参数。捷联惯导系统原理框图如图3所示。
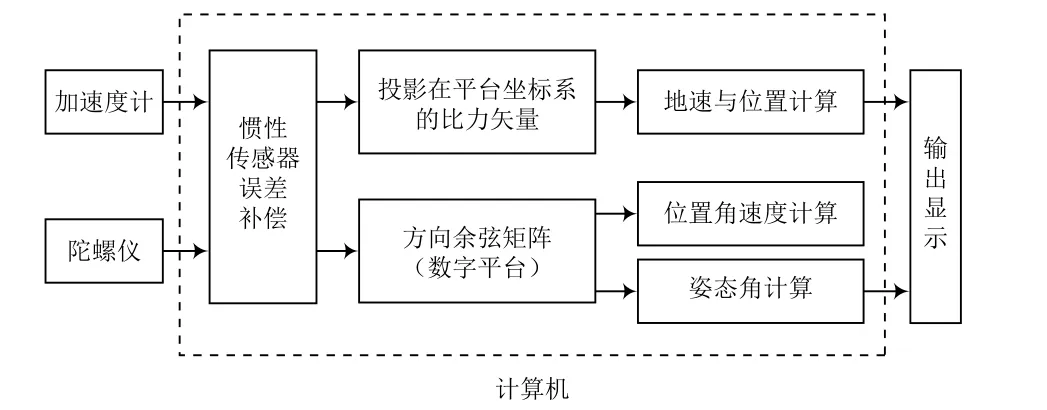
图3 捷联惯导系统原理
相比静止的音频传感器阵列,遥控或运动的音频传感器阵列能够方便、快捷地投放到待测目标区域,并根据需要随时改变或调整搜救范围,解决因障碍物遮挡带来的定位盲区问题。运动音频传感器阵列载体(如无人机)的运动轨迹及速度变化的准确测定是实现运动音频传感器阵列定位算法的关键,运动轨迹及速度变化的微小误差都可能导致阵列声源定位出现较大误差。故遥控或运动的音频传感器阵列使用先进的捷联惯导对阵列运动轨迹及速度变化进行准确测定,实现对待搜救人员的准确定位和搜寻。
3 结 语
在各种灾害中,火灾是发生频率最高也最普遍的灾害。本研究设计了一种遥控式生命探测装置[11],通过控制载有平面麦克风阵列的无人机实现音频传感器阵列的运动,利用运动的音频传感器阵列和单片机拾取、采集静止的待搜救人员的音频信号,利用三维坐标转换实现音频传感器阵列和声源的坐标转换,以适用于现有定位算法。该生命探测仪解决了现有技术中生命探测仪使用场景受限、探测效率低的问题,具有重要的现实意义。
猜你喜欢
复旦学报(自然科学版)(2019年3期)2019-07-19
电子测试(2018年23期)2018-12-29
测控技术(2018年2期)2018-12-09
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
做人与处世(2015年19期)2015-09-10
计算机工程(2015年4期)2015-07-05
