某海洋综合调查船直叶桨推进器操纵性分析
2021-05-23 12:16马强陆小科姜本俭
广东造船 2021年2期
马强 陆小科 姜本俭


摘 要:福伊特施耐德推进器(简称VSP),又名直翼舵桨装置、摆线推进器、直叶桨推进器等。由于其在国内应用较少,对其操纵性不甚了解。本文对某海洋综合调查船安装的VSP推进器的结构、原理、推进等进行介绍,并对其操纵性进行分析和实船验证,得出其具有矢量特性、舵桨合一性、控制模式多样性。对国内后续安装该类型推进器的船舶提供借鉴和参考。
关键词:直叶桨推进器;VSP;操纵性
中图分类号:U661.31 文献标识码:A
Abstract: The Voith Schneider Propeller (VSP), is also known as cycloidal propeller. Because of its less application in China, the maneuvering performance of VSP is not well understood. This paper introduces the structure, principle and propulsion of the VSP installed on the oceanic resource research vessel, analyzes and verifies its maneuvering performance. It is concluded that it has the vector property, rudder-propeller unity and control mode diversity.
Key words: Voith-Schneider propeller; VSP; Maneuvering performance
1 前言
随着科考船等海上作业船舶对船舶操纵性能要求越来越高,直叶桨推进器(简称VSP)因其独一无二的将推力和转向结合在一个装置中,可精确快速地在各方向产生无级推力,操纵精确灵活,使其在高端船舶领域占有一席之地。但由于VSP价格相对高昂,在国内装船数量较少,目前仅南通中远船务公司2012年交付的“海上安装者”风电安装船、天津新港船舶重工2017年交付的“淞航”远洋渔业调查船、马尾造船股份有限公司2017年交付的Southern Star潜水支持船、以及我司2019年交付的海洋综合资源调查船装有该种推进器。
本文从实船安装的VSP入手,对其结构、原理、推力和方向调节等方面进行介绍,对其操纵性进行分析和实船验证。
2 VSP基本结构和原理
我司建造的海洋综合资源调查船安装的VSP,其内部结构由静止部件、旋转部件、控制部件三部分组成,如图1所示。
图1中输入轴通过减速齿轮(6)减速后,再通过伞齿轮(7)减速后带动旋转箱体(1)转动,从而使桨叶(2)绕控制杆中心转动。当控制杆下控制点S与旋转箱体中心O重合时,桨叶绕推进器旋转中心作切线圆周运动,此时不产生任何推力(如图2所示),真正做到了零螺距零推力;当控制杆下控制点S与旋转箱体中心O成一定的偏心时,桨叶将不位于切线位置而与切线成一定夹角,由此产生对水推力。水反作用于船舶使船舶产生运动,如图3所示。
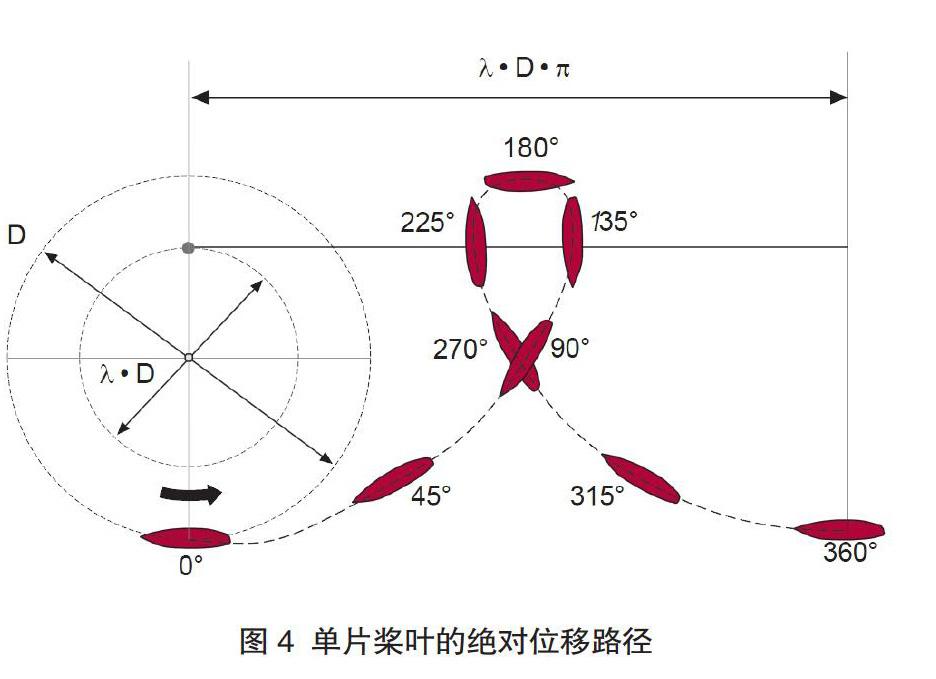
VSP垂直向下的数片桨叶围绕同一垂直轴线匀速旋转,每片桨叶分别绕着各自的轴心做摆动,经叠加后形成摆线运动,如图4所示。
3 VSP推力和方向调节
VSP的推力和方向两者的变化,均由同一套伺服机构来控制,如图5所示:伺服机构主要由两台成90°夹角的伺服马达(1)组成,通过集成在本体上的液压系统改变伺服马达的行程,即可改变控制杆上控制点S相对中心O 的位置,从而使控制杆下控制点S沿相反方向改变,并通过桨叶执行装置(3)改变桨叶的转角,随之产生推力,且偏心距越大推力越大。
由于其推力方向与控制杆成90°夹角,故控制杆上控制点S与船体横向的夹角,即为其推力与船体首向的夹角,此角度可以从本地指示面板(见图6)看到。为了与船舶航行描述一致,图6中将此面板旋转了90°。此指示板是安装在外壳盖内,从外部可以看到指针;指示面板上分布有刻度线,沿径向等分的几个同心圆为螺距大小刻度。最大刻度为100%,即螺距边界线(3);最外圆为控制杆边界线(2),即控制杆的机械限位。
理论上指示板上的指针可以指示在螺距边界线内的任意位置,但考虑到船舶航行的安全性,即在纵向分量大时(高速状态)如果横向分量过大,则存在船体倾覆的风险。故推进器厂家根据不同船的型号、任务和速度,对每艘船都设置了不同的控制图谱曲线(1),以限制横向分量的大小,船舶在正常航行时都不会超出该限制曲线;只有在DP模式下,由于船舶航速很低即悬停状态,控制杆可超出该限制曲线但不超过螺距边界线。
本船的控制图谱曲线,如图6中(1)曲线所示。从图中可以看出,控制图谱曲线为一条由上下两部分的抛物线和中间部分的直段线组成的函数曲线。当本船在100%指令航行时,控制杆上控制点S将在这条红色曲线上运行;当指令为90%时,控制点将在等比例缩小的红色曲线上运行。因此,只有在首向不变时即横向螺距为0时纵向螺距可以达到最大值;而随着横向螺距的加大,纵向螺距随之减小,当达到本船的横向螺距限制点(约73%),纵向螺距减小到0~20%之间。
由此可知,VSP最终是通过改变舵心的偏心距OS来调节推力大小、通过改变舵心的相位角來调节推力方向;此外,在偏心距一定的情况下,随着输入转速的增加,推力也会随着加大。与全回转推进器相比,由于其方向改变无需转动大齿轮盘,使得其转向更迅速快捷,但同时也限制了转向推力的输出,而不是像全回转推进器一样推力的大小与方向无关。
4 VSP操纵性分析
VSP遥控手柄为矢量手柄,手柄方向即为推力方向,手柄推进大小即为指令大小。VSP通过接受到这两个信号,根据预先设定的函数曲线,最终分解为纵向螺距和横向螺距,并反馈给液压执行机构使控制点达到所需位置,在手柄矢量方向产生相应的推力。
由于手柄的矢量特性,船舶的操纵性就与推进器的所属位置密切相关,(如图8所示);当推进器位于船舶尾部时,由于推力对尾部作用,故船舶前进中转向右舷,手柄应设定为左向前(如图7所示);而当船舶倒车中转向右舷,手柄应设定为右向后;如果推进器位于船舶首部时,则操作方向与之相反。因此,港作拖轮为了与常规操舵方向一致,通常将推进器安装于靠首部位置。
由于两个推进器手柄并不联锁,故当左侧推进器手柄位于右下角45°方向、右侧推进器手柄位于右上角45°方向时,船体可以实现向右舷横移,如图9所示。
对于控制模式,由于推进电机由变频器控制,使得其输入转速是可变的。VSP的推力大小受到螺距和转速两方面的影响,故VSP操纵模式可分为定转速模式和联控模式:
(1)定转速模式是在转速不变的情况下,通过改变螺距来改变推力大小。本船设有三档转速,分别为650、800、1 000 r/min,此三档转速共用一条螺距调节曲线,如图10所示;
(2)联控模式是既改变转速又改变螺距来改变推力大小。在低转速时先调节螺距,当螺距达到100%时再提高转速直至额定转速,如图11所示。
从图10、图11可以看出:联控模式下能充分发挥VSP的舵效,经济性高,故航行状态下推荐使用该模式;而在靠码头或繁忙航道内航行时,为提高响应速度、保证船舶安全,推荐采用1 000 r/min定转速模式。
此外,由于VSP的推力方向可以360°可调,故在配置2台及以上VSP时就具有了动力定位(DP)能力。在DP模式下,也可分为定转速和联控模式两类,其特性与上述相同,不再复述;该模式下唯一的区别,就是其控制图谱曲线是螺距边界线的外圆,这样可使任何方向力的最大值是相等的,使得其能在任何方向发挥最大的动力定位能力。
最后,由于VSP的推力可任意方向,且响应速度快,使得配置2台VSP时能产生与波浪相反的扭矩,实现减摇功能。此减摇功能能覆盖船舶从0到全速范围,不过由于减摇的实现需预留一定的功率,故低速下减摇效果好于高速阶段。
5 实船验证
通过海上航行试验,对其操纵性进行了相应验证:
推进器装于尾部,其转向方式与上述描述一致,其响应速度相当灵敏,基本做到舵角指令到则舵角方向同时到位;实船全速时从左舵15°到右舵15°仅用7.4 s,约4°/ s,远高于规范要求的2.3°/ s;在回转试验中,回转直径在3倍船长以内,优于规范要求的不超过5倍长。
必须指出,在做上述试验前存在一个操舵角度的问题。因其操纵手柄是矢量手柄,操纵杆上并无角度标注,因此如果用矢量手柄做上述试验,对于舵角指令的下达存在反复修正的情况。由于本船自动舵模块配置了随动舵手轮,此手轮上有电子显示角度。为此,在做上述试验时,先通过矢量手柄控制好航速,再选用自动舵模式下的随动模式,通过随动舵手轮控制方向,从而解决了舵角指令的精确下达问题。因此,其他船在选用此类推进器的控制模块时,需考虑操舵指令问题。
6 结束语
通过以上对VSP的实船应用介绍和操纵性分析与验证可以看出,VSP的操纵具有矢量特性,且与安装位置有关,操纵反馈迅速灵敏,舵桨合一。同时其具有多种控制模式,不同船型可以根据操作习惯设定几种控制模式,以实现最大经济效益。
参考文献
[1] VSP. DAYANG︱32R5 ECS/265-2 Operation Manual[Z],2019 .
[2] R.劳克斯,宋新新.特种船舶低噪声直翼推进器[J].机电设备,1990(03).
[3] 王振邦.擺线推进器机构的研究[J].船工科技,1983(03) .
[4] 钱晓南.直翼推进器的性能分析及其理论[J].中国造船,1963(03) .