
基于磁通门和磁阻传感器的混合宽带磁传感器的研究与设计
2021-05-18 02:16许朋博王鲜然欧阳君杨晓非
仪表技术与传感器 2021年4期
许朋博,王鲜然,欧阳君,杨晓非
(华中科技大学光学与电子信息学院,湖北武汉 430070)
0 引言
频域电磁法是实现大地电磁探测的重要手段和方法。这种方法在铁路隧道勘查、工程地质问题勘查、浅层岩溶勘查、地下水勘查、煤田水文地质勘查、稀有矿床勘查、矿山采空区探测、深部矿产勘查、金属探伤、海缆定位、探潜、海底打捞等多领域有广泛应用[1-5],并取得了很好的效果。一般而言,频域电磁法中被测磁场频率范围从mHz量级到kHz量级不等,被测磁信号幅值范围从pT量级到μT量级不等,跨越的动态范围和频率范围非常广[6-7]。对于磁传感器而言,通常动态范围和频响范围有限,不同的磁传感器适用于不同应用场景。例如:常用的光泵磁力仪、质子磁力仪只能测量准直流或低频磁场。磁通门传感器低频噪声较小,但响应频率一般在1 kHz以内。磁阻传感器频响范围宽,最高可到MHz量级,但低频噪声较大。
本文根据磁通门传感器和磁阻传感器各自的特点,提出一种拓宽传感器工作频率范围的方法。文章通过分析数据融合算法,并在FPGA平台上通过数字信号处理加数据融合的方式设计实现了一种低噪声宽频带的混合磁传感器。通过制作混合宽带磁传感器样机,并搭建磁传感器测试平台,验证了设计方法的可行性,最后评估了混合宽带传感器的性能。
1 混合磁传感器的基本原理分析
1.1 多传感器数据融合
随着科学技术的发展,多传感器信息数据融合技术逐渐成为传感器探测和信息处理领域的重要组成部分[8-9]。多传感器数据融合测量系统一般主要由传感器(2个及以上),数据预处理,特征提取,融合计算和结果输出等部分构成,其系统构成如图1所示。信号预处理用于信号传输前对信号进行调理,包括放大、滤波等,A/D转换器用于将传感器的模拟信号转换为数字信号,特征提取用于对数据进行预处理,融合中心一般为计算机或者微处理器。

图1 多传感器数据融合过程
1.2 互补滤波数据融合
在多旋翼飞行器的控制中,常常需要控制器实时采集陀螺仪和加速度计的数据,并在微处理器上进行数字滤波和姿态解算。陀螺仪动态性能好,工作频率高,但存在严重的低频噪声。加速度计对加速敏感,存在低频噪声小,而高频噪声大的问题。在实际应用中,根据加速度计和陀螺仪这两种传感器在噪声频带上的互补特性,常使用融合算法将2种传感器数据融合在一起,降低了低频和高频噪声对飞行器姿态测量的影响[10-11]。
针对上述陀螺仪和加速计来讲,当多个传感器针对同一待测信号(角度)互相独立测量时,且噪声互不影响的情况下,互补滤波器提供了一种行之有效的数据融合方式。当有2个测量值
y1=x+n1
y2=x+n2
式中:n1为高频噪声;n2为低频噪声。
假如现有2个互补的传递函数:
F1(s)+F2(s)=1
式中:F1(s)为低通滤波器;F2(s)为高通滤波器。
则系统状态输出x的估计传递函数为
X′(s)=F1(s)Y1+F2(s)Y2
=X(s)+F1(s)n1(s)+F2(s)n2(s)
(1)
通过式(1)可以看出信号X(s)不受滤波器的影响,完全通过。但是对于噪声n1(s)却只有低频部分可以通过,而对于噪声n2(s)只有高频部分可以通过,因为信号X(s)不受滤波器的影响,所以这样的滤波器也称为无损滤波器。互补滤波器常用于融合一阶动态系统的低带宽的位置数据和高带宽的速度数据。
1.3 混合磁传感器的数据融合方案分析
由于穿隧磁阻效应(TMR)传感器较其他磁阻传感器优越的性能,文中用到的磁阻传感器以TMR为例。磁通门具有低频噪声小、频响范围小的特点,而TMR具有低频噪声大、高频噪声小,频响范围大的特点,磁通门和TMR在整个测量频带内两传感器的噪声和工作频带也具有互补的特点。
图2为磁通门和TMR混合传感器的噪声谱分析示意图,图2(a)是磁通门传感器的噪声谱,磁通门的低频噪声相对TMR而言较小,但磁通门的工作频率低。图2(c)是TMR传感器的噪声谱,其噪声主要集中在低频段且比磁通门噪声大,在高频段噪声比磁通门小。如果对磁通门传感器和TMR传感器的输出分别加上低通滤波器和高通滤波器,就分别得到图2(b)和图2(d)对应的噪声分布图,可见磁通门的输出噪声进一步减小,滤除了高频噪声,而TMR的低频噪声被滤除。如果将经过滤波后的磁通门传感器和TMR传感器的输出信号在频带上进行“拼接”,即数据融合,就可以得到如图2(e)中所示两传感器数据融合后的噪声谱曲线,可以看出融合后的输出噪声具备磁通门在低频处噪声低的特点,TMR在高频处噪声低的特点,达到了两传感器的性能上扬长避短的效果。

图2 磁通门和TMR数据融合的噪声分析
目前对于数据融合的处理的方式通常是先将传感器的输出信号进行模数转换,然后通过计算机进行数据处理。由于待测磁场信号频率范围较宽,为保证混合磁传感器对待测信号的实时处理以及输出有较好的噪声性能,本文在互补滤波数据融合算法的基础上提出了一种行之有效的数据融合方式,其算法原理如图3所示。图3中GC为磁通门传感器的输出增益,GT为TMR传感器的输出增益,fp1为磁通门传感器经过低通滤波器后的通带截至频率,通带范围0~fp1,fp2为TMR传感器的经过高通滤波后的通带截至频率,通带范围fp1~fn,VC为磁通门输出电压,VT为TMR输出电压,VO为融合后混合传感器的输出电压。
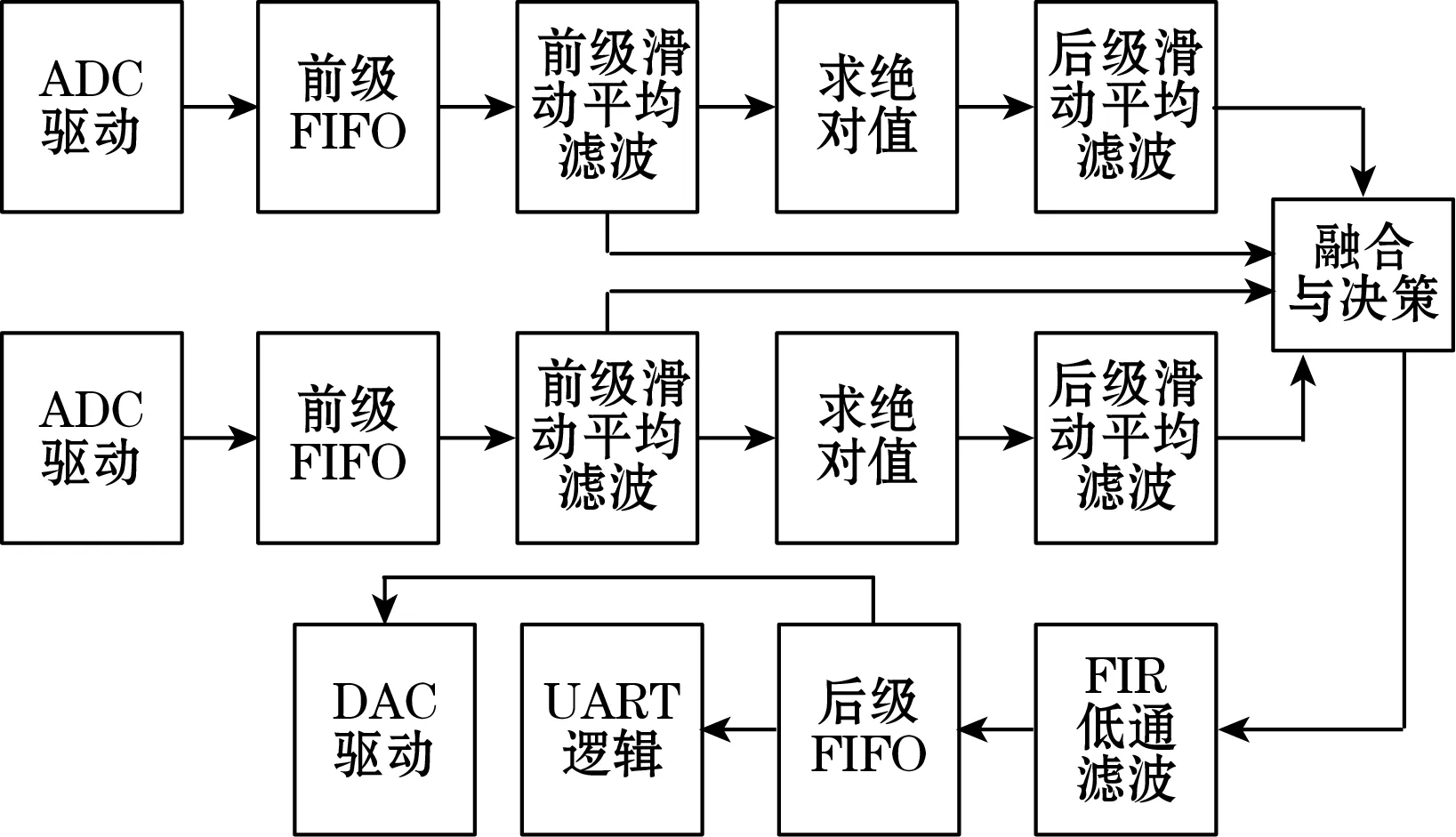
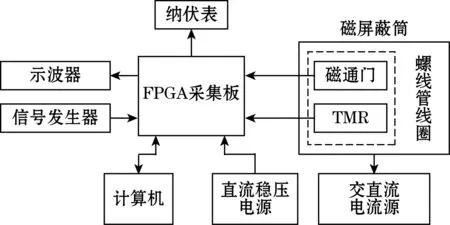
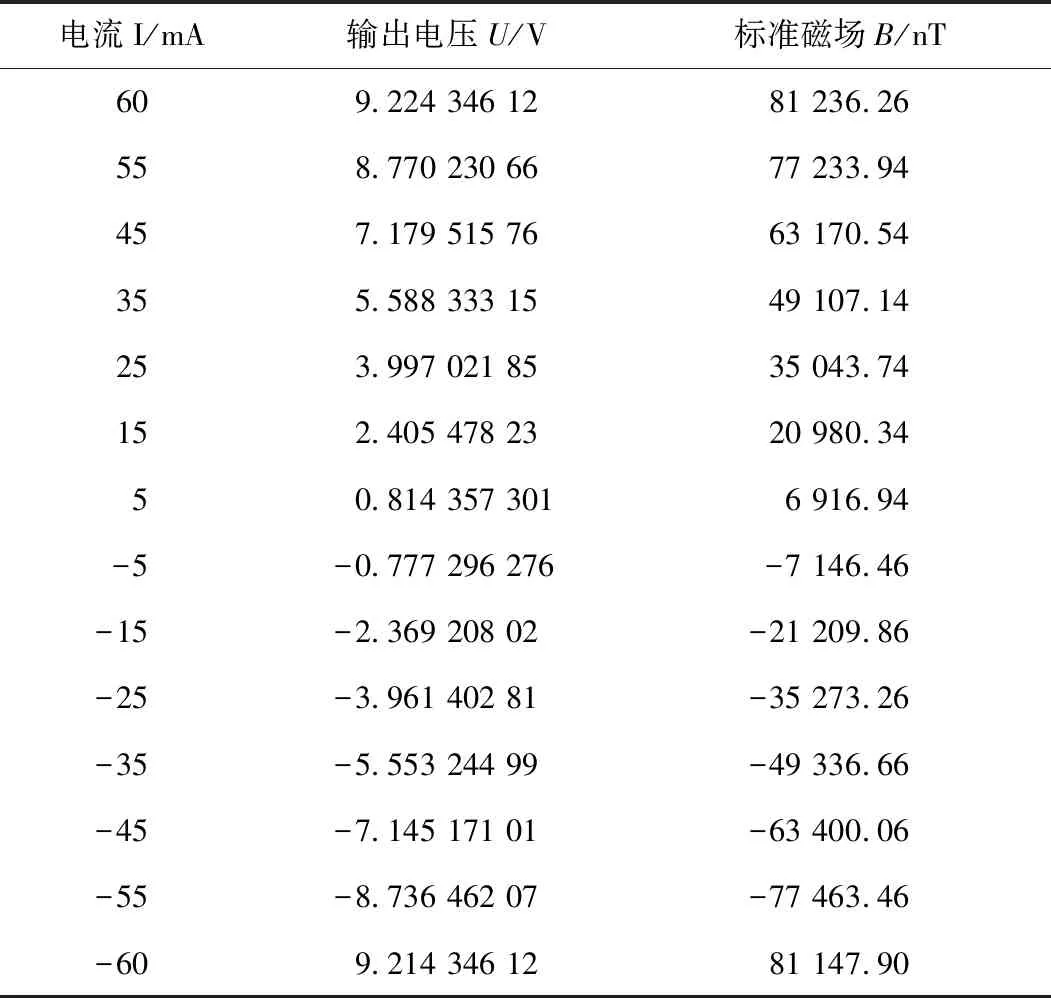
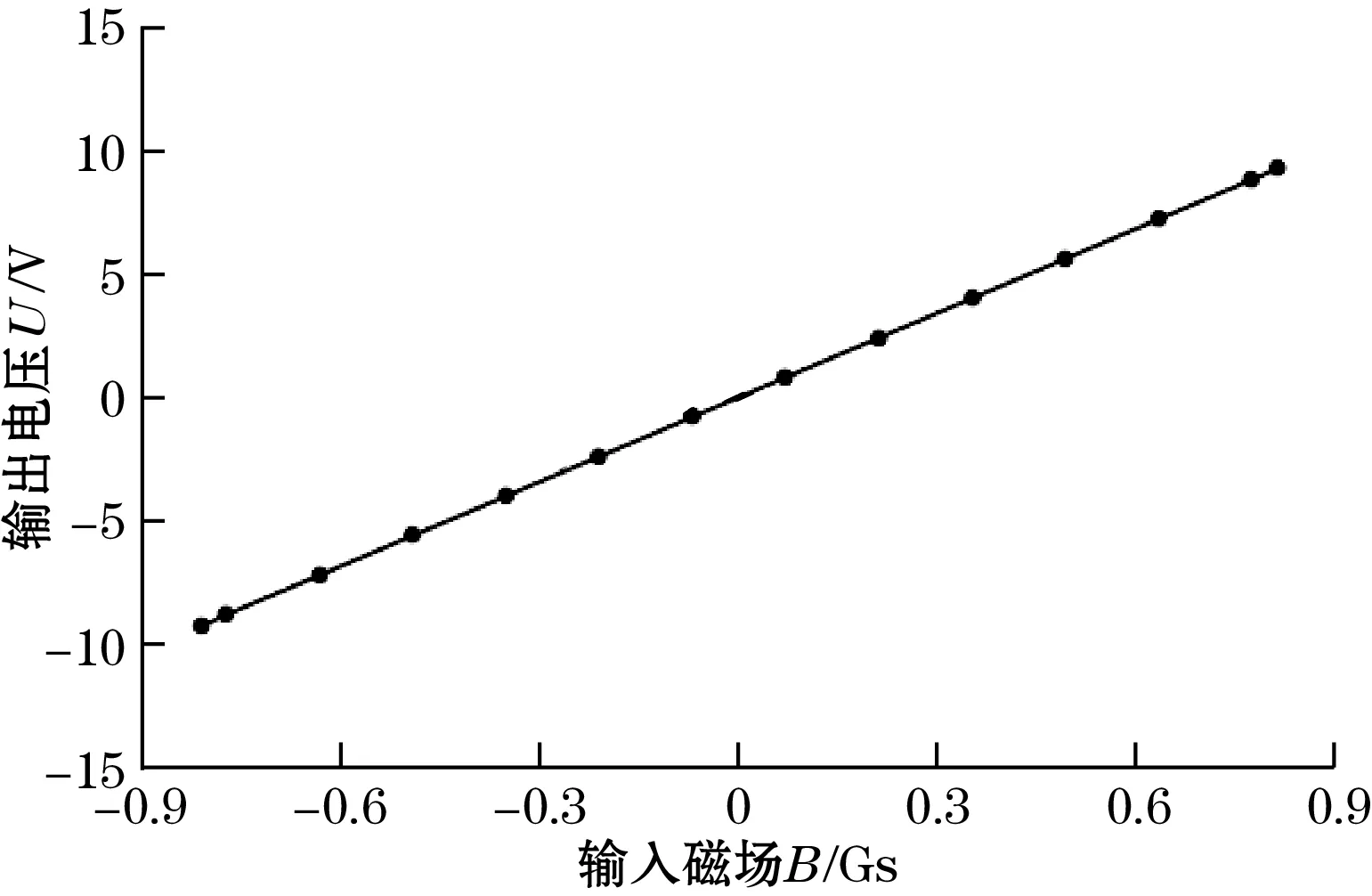
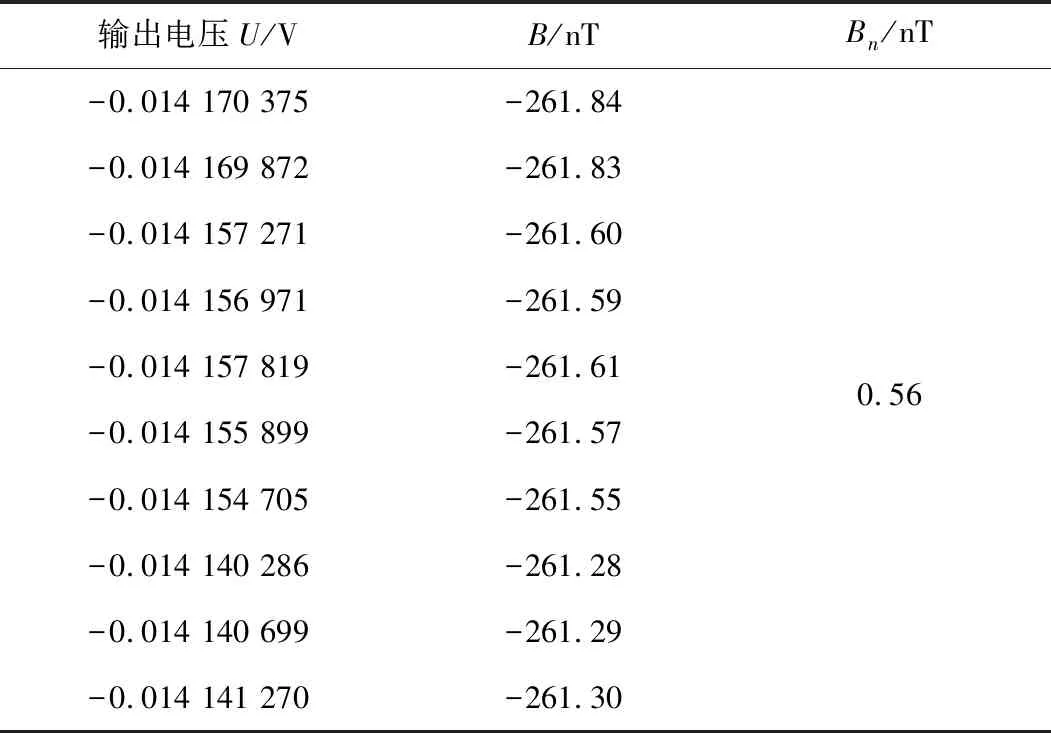
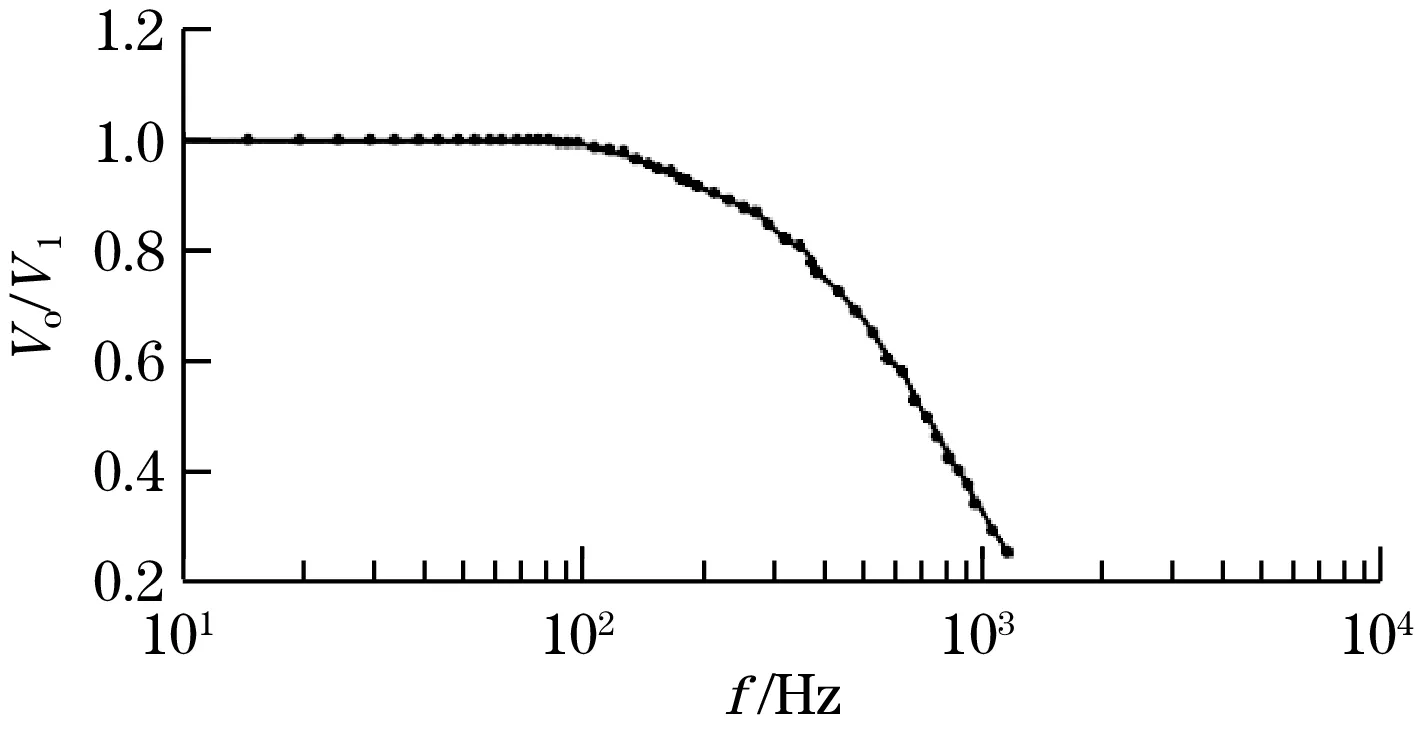
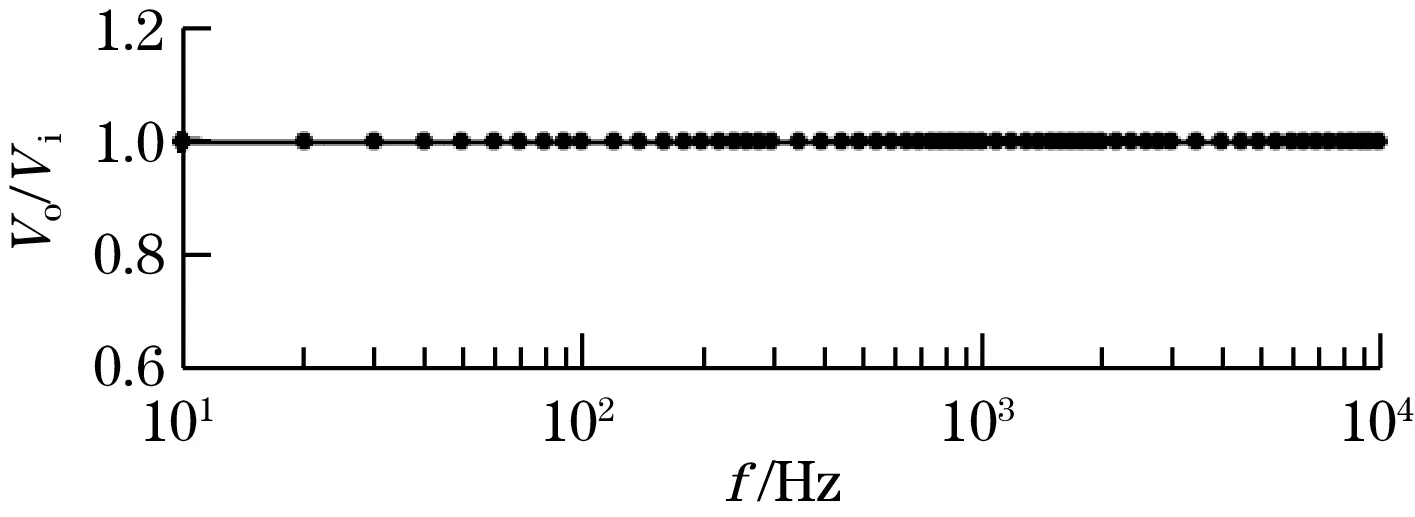
如图3(c)所示,现假设磁通门的通带截至频率fp1大于TMR的通带截至频率fp2,即fp2 图3 数据融合算法分析 上一小节分析了磁通门和TMR的融合原理,但其原理分析是简化的分析方法,忽略了一些条件限制,经过仿真实验分析,数据融合前还存在以下问题: (1)磁通门和TMR输出的信号本身都是模拟信号,对噪声敏感,且同一磁场输出电压大小不同。 (2)由于磁通门传感器内部有多处惯性环节,使得输出相对于输入有延时,进而使得磁通门和TMR在测量同一磁场时输出存在相位差。 (3)在信号的采集、转换、输出时都会引入一定量的噪声。 考虑到以上问题,为保证融合方法的可行性,分析设计了混合磁传感器的硬件电路,其硬件系统电路框图如图4所示。 图4 混合传感器的系统框图 磁传感器主要由磁通门和TMR组成,放大电路用于调理传感器输出信号。低通滤波器用于滤除磁通门的高频噪声,高通滤波器用于滤除TMR的低频噪声,全通滤波器用于调整两信号相位差。ADC电路包括ADC转换器、信号衰减电路、抗混叠滤波器等。数据处理电路主要由FPGA系统构成,用于数字滤波,数据融合和电路控制。DAC和重构滤波器电路用于模拟输出,还原待测磁场信号,UART-USB电路用于和其他设备进行数字通信。 混合传感器的数据融合在FPGA系统内部完成,采用Verilog语言对算法进行编程,经过编译下载可以在FPGA内部映射成实际的电路结构,FPGA强大的数据并行处理能力,保证了系统的实时性。在FPGA系统中,算法和控制部分由图5所示的模块组成。 图5 FPGA算法与控制模块组成框图 ADC驱动用于控制ADC对来自磁通门和TMR的模拟信号进行同步采样,DAC驱动用于控制DAC进行数模转换。前级FIFO用于隔离FPGA内部前后级时钟并缓存ADC送来的数据,后级FIFO用于缓存融合后的数据。滑动平均滤波用于对数据进行预处理,初步滤除数据噪声。在数据融合中绝对值电路用于对双极性信号进行求绝对值运算,后级滑动平均滤波模块用于深度平滑数据波形,为数据融合中的判断提供依据,融合与决策用于数据进行控制和输出。FIR滤波器用于对融合后的数据进行多级滤波,进一步降低系统输出噪声。UART逻辑用于对融合后的数据进行收发控制,保证与其他设备的正常通信。 根据以上分析,设计并制作了混合传感器的样机,其中图6为磁通门传感器和TMR传感器的样机,图7为基于FPGA的数据融合系统样机。 图6 磁通门和TMR传感器样机 图7 FPGA数据采集系统 传感器在设计和制作完成后,其性能指标需要通过测试进行分析和评估。通过对系统软件和硬件的测试,可以分析出系统的性能,进而不断的对系统进行优化,使整个系统的性能达到最优。为了真实可靠的评估和分析混合磁传感器的性能,根据实验室现有仪器,搭建了磁传感器测试平台,测试平台组成框图如图8所示,实物平台如图9所示。 图8 磁传感器测试平台框图 图9 磁传感器测试设备 将磁通门和TMR传感器放入带有螺线管的磁屏蔽筒中,并通过电缆连接至屏蔽筒外的FPGA系统板。磁屏蔽筒是由高导磁率的磁性材料内外多层组成,可以为外界干扰磁场提供一个低磁阻的磁通路,使磁力线都通过铁壳短路而不影响屏蔽体里面的部件,达到屏蔽目的[5]。周围环境磁场经过磁屏蔽筒的屏蔽,桶内的剩磁小于5 nT,可以忽略不计,近似为零磁场环境。屏蔽筒内有用于产生磁场的螺线管线圈,通过高精度交直流电流源为螺线管线圈提供电流激励,可产生标准磁场。电源采用线性可编程直流稳压电源,输出电压精度高,纹波小。计算机通过USB接口与FPGA板进行数字通信,用于对FPGA进行编程和获取磁场数据,并通过计算机软件直接进行分析和处理。示波器用于测试传感器的频率响应。电压表采用纳伏表,用于测量传感器输出电压,信号发生器用于测试和调整电路各项参数。 3.2.1 灵敏度 灵敏度(静态灵敏度)是传感器或检测仪表在稳定状态下输出量的变化Δy与输入量的变化Δx之比,用k表示: k=Δy/Δx (2) 如果输入输出特性为线性的传感器或者仪表,则有: k=y/x (3) 根据上述对传感器灵敏度的定义,通过搭建的测试平台对混合磁传感器的灵敏度进行标定。将混合磁传感器放入磁屏蔽筒中,将其敏感轴和螺线管产生磁场的方向对准,将输出与纳伏表相连,电流源输出和螺线管输入相连。调整电流源的输出为直流,改变电流源输出电流的大小,即改变屏蔽筒内螺线管产生的标准磁场的大小。每次调整电流源使电流每次步进5 mA,从60 mA至-60 mA变化,记录每次改变电流值时磁通门输出的电压值。根据螺线管产生的标准磁场值和混合传感器对应的输出电压值列出数据如表1所示。 根据表1,利用最小二乘法拟合混合磁传感器输入输出数据,得到图10所示的输入输出拟合曲线,并得出混合传感器的输出电压对应的磁场值大小的转换关系,其转换公式为 VH=0.000 113×BH-0.030 664 (4) 式中:VH为混合磁传感器的输出电压,V;BH为螺线管产生的标准磁场值,nT。 表1 混合磁传感器输入输出数据 图10 混合磁传感器输入输出曲线 由此可以得到灵敏度系数k=0.113 mV/nT,偏置为-0.030 664 V,测量范围为±0.8 Gs(1 Gs=105nT)。 3.2.2 磁传感器噪声 本底噪声是磁传感器的一项重要指标,噪声的大小决定着磁传感器能够测量的最小磁场。本底噪声的定义:当外磁场不变时,磁通门传感器的示值在短时间内的变化,磁场噪声的峰峰值范围通常为0.1~100 nT。测试方法为:取测量峰峰值为噪声指标,将混合磁传感器置于磁屏蔽筒内,在一段时间内,记录传感器输出值。令测量的最大值为Bn1,最小值为Bn2,则噪声Bn为 Bn=Bn1-Bn2 (5) 根据上述测试方法,在10 s内对磁通门传感器的输出值采样10个数据,记录数据如表2所示。 用高精度数据采集卡对混合磁传感器、磁通门传感器和TMR的输出进行连续采样,并对采样得到的数据在计算机中进行噪声谱分析,可得如图11所示的噪声谱曲线图。通过图中曲线可以看出,TMR传感器在低频处噪声密度比磁通门传感器大,在高频处,较磁通门的噪声密度小。而混合磁传感器的噪声密度在低频处较TMR传感器的噪声小,和磁通门的接近,在高频处,噪声密度进一步减小,主要原因是混合传感器在数据融合的过程中采用了数字滤波器的结果。 表2 混合磁传感器本底噪声数据 图11 混合磁传感器噪声谱 3.2.3 混合磁传感器的频率响应 将混合磁传感器置于测试平台中,使其敏感轴和螺线管中磁场的方向对准,使混合磁传感器的电压输出端接到数字示波器的输入端,调整电流源的输出电流大小,使得输出一个固定的电流值,使得螺线管输出一个固定峰值的磁场大小。改变电流源的信号输出频率,读取数字示波器输入信号的峰峰值,从一个较低频率开始,逐步增加电流源输出信号频率,并记录传感器输出电压随频率变化的数据。根据记录的数据做出磁通门磁传感器输出的频率响应曲线。 通过以上方法可以测得磁通门传感器,TMR传感器以及混合磁传感器的频率响应曲线,图12为磁通门传感器经过低通滤波器后的频响曲线,图13为TMR传感器经过高通滤波器后的频响曲线,图14为混合磁传感器的输出频响曲线。 由于磁通门传感器外部接有低通滤波器,这就使得磁通门传感器的工作频率受到限制,从图12中可以看出磁通门在100 Hz处输出开始衰减,在500 Hz处输出(Vo)为输入(Vi)的0.707倍左右,符合低通滤波器的特点。TMR传感器的工作频带较宽,可以从直流到很高频率,TMR传感器连接高通滤波器,可以滤除信号低频噪声,其频率响应曲线在图13中可以看出,符合高通滤波器的特点,同时看出TMR的响应频率可以达到10 kHz。根据磁通门和TMR的频响曲线,结合数据融合算法测得混合磁传感器的频率响应曲线如图14所示,由图14可以看出混合传感器的频率响应范围达到了10 kHz,且曲线平坦度较高,达到了拓展单一磁传感器频带的目的,使得混合传感器可测量较宽频带范围的磁场信号。 图12 磁通门传感器的频响曲线 图13 TMR传感器通过HPF的频响曲线 图14 混合磁传感器的频响曲线 在地磁探测领域,被测磁场信号幅值范围和频率都较广,但还没有一类磁传感器能较好的同时覆盖如此宽的动态范围和频响范围。本文的重点就是针对此问题设计并制作出一种能够测量频率范围相对较宽,且量程相对较大,同时噪声又尽可能低的磁传感器,以满足多领域磁场测量的应用需求。在本文提出的数据融合算法的基础上,根据实验结果与分析,可得如下结论: (1)多传感器数据融合基于多个传感器分别测量和转换数据,通过信号采集和数字信号处理技术将不同传感器的数据融合在一起。本文通过将磁通门传感器与TMR传感器进行数据融合和测试,证明了这种方法的可行性。 (2)互补滤波算法将磁通门噪声低,工作频带窄和TMR高频噪声小,频带宽的特点充分结合起来,利用FPGA强大的并行处理数据的能力,采用比较、判断和滤波的方式将两传感器的输出数据进行融合,拓展单一磁传感器的工作频带,这种方式可以有效减小系统噪声,为微弱磁探测和宽频带磁探测提供了一种行之有效的方法。 (3)通过设计和制作混合传感器样机,并搭建系统测试平台,测试了混合磁传感器的灵敏度、噪声和频率响应等参数。通过测试和分析可以看出混合磁传感器较单一磁传感器优越的性能。但混合磁传感器在实际设计和制作中需要反复调试参数,灵活度不够高,如何改进数据融合算法以提高混合传感器的自适应能力,将是后续进一步研究和解决的问题。
2 混合磁传感器的设计实现
2.1 硬件系统结构

2.2 软件系统结构
3 系统测试分析


3.1 测试平台介绍

3.2 混合传感器性能测试


4 结束语
猜你喜欢
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
电脑知识与技术·经验技巧(2020年5期)2020-06-22
航天电子对抗(2019年4期)2019-06-02
传感器与微系统(2018年7期)2018-08-29
中学生数理化·高二版(2016年12期)2017-02-28
Coco薇(2016年1期)2016-01-11
电测与仪表(2015年12期)2015-04-09
