城市轨道交通车辆智能运维指标体系与应用
2021-05-17 15:12
智能城市 2021年7期
(广州轨道交通建设监理有限公司,广东广州 510010)
1 智能运维总体方案
城市轨道交通车辆智能运维系统分为三大部分,具体包括:车厂智能生产管理系统、车辆智能检修系统、车辆智能专家诊断系统。三大子系统所承担的工作有所不同,具体职能也有所差异。
(1)车厂智能生产系统主要工作内容为安排车辆的生产,智能管理车辆生产计划,并通过设备的自动定位和核对施工工单展开智能冲突检测工作。
(2)车辆智能检修系统的主要功能为智能检修,主要工作任务检测城市轨道车辆的车底、车轮及车侧是否存在异常情况和安全隐患。
(3)车辆智能专家诊断系统主要是应用科学技术手段如图像处理技术、大数据技术和AI技术等,以模糊逻辑为推理算法,对城市轨道车辆的运行状态进行全方位评估和检测,掌握真实的车辆健康信息,确定车辆故障,并判断出故障原因后,制定合理的维修方案,提升车辆的运营水平和运营质量。
2 车辆智能检修系统
2.1 智能检修机器人
在车辆智能检修系统中配置智能检修机器人,能够全面收集车辆信息,减轻人工作业的负担,保证检修的精准性。这种智能检修机器人能够在动静态的工作环境下收集高清的车底、车轮及车侧图像,并能够通过应用先进的图像处理技术、控制技术和算法,判断车辆是否出现异常。
车底定位模块由面阵相机和线扫相机构成,通过轮轴编码器保持相机的稳定性,面阵相机的主要功能是定位车底设备,线扫相机的主要功能是采集车底设备的图像。

图1 检修机器人采集样图
检修机器人采集样如图1所示。智能机器人借助相机采集车底设备的高清图像,以便运维系统根据图像判断轨道车辆设备是否存在异常,更高效地确定故障位置,诊断故障等级,给出相应的故障原因和维修决策方案,便于维修人员选择恰当的检修标准和工具设备,达到提升维修效率、降低经济损失的目的。
2.2 走行部智能检测
走行部检测系统是一个安装在城市轨道交通车辆入库线上的系统,轨道交通车辆不需要停车,就能够对轨道交通车辆进行自动检测,采集高清的走行部及闸片的图像,诊断车辆走行部是否存在异常。走行部智能检测系统的工作原理是借助库内轨旁检测设备采集车侧部分的高清图像,以数字图像处理技术为计算手段,对走行部及闸片展开详细全面的异物检测,判断车辆的关键部件是否存在缺失和变形等问题。走行部监视单元采集模块效果如图2所示。
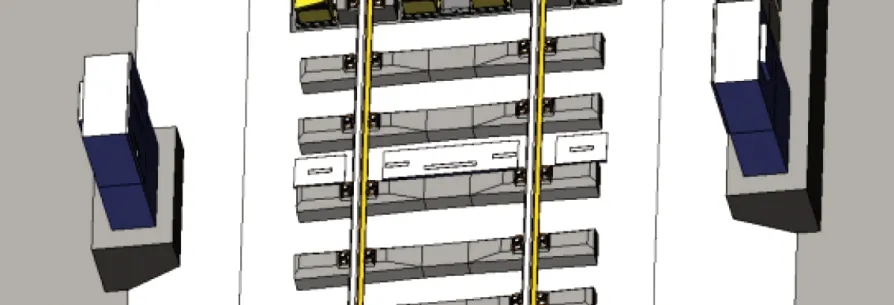
图2 走行部监视单元采集模块效果
2.3 其他规划布局
车辆360°视觉检测的功能检测主要针对城市轨道交通车辆关键部件和可视部位,通过采集的高清图像判断车辆关键部件,如螺栓、螺母、受流器及齿轮箱等是否出现了松动和丢失,检查各类管线是否存在脱落问题。在对车辆关键部件常规测距和可视部位的图像监视过程中,若发现存在异常情况,系统会自动提示和报警。
轮对数字激光检测的主要功能是精准、高质量地完成车轮踏面轮廓、车轮直径及对内侧距的测量工作,以无线数据传输为手段,将采集的数据传输到控制系统,便于分析车辆稳定性,为轮对镟修决策提供科学有效参考,为提升列车运行的稳定性和安全性奠定良好基础。车辆360°视觉检测和轮对数字激光检测能够提升车辆轨旁检修水平,实现对车辆走行部、闸片的科学检测,掌握准确的车体情况,提升车辆检修的智能化水平。
3 车厂智能生产管理系统
3.1 车辆状态管理
车厂智能生产管理系统能够借助定位设备对已经进入厂段的车辆开展实时动态监测,精准定位车辆停放的股道,反馈车辆的带电状态、故障信息等相关状态信息,确定维修工单的情况,为检修人员查询确定车辆的整体状态提供便利。同时,以逻辑条件为算法,能够对股道的状态进行全天候动态管理和检测,判断作业是否能够正常进行,确定各个检修维护作业时间是否冲突,最终达到提升车辆状态管理智能化水平的目标[1]。
3.2 运营日计划管理
智能运维系统能够综合考虑车辆检修计划、施工情况及厂段股道信息等影响因素,建立并完善车辆智能排布模型;按照各影响因素的权重值对车辆进行排布,智能化排列车辆运营日计划;根据车辆检修的具体需要和实际情况,如需要收回、发出的车辆,检修维护人员再次对运营日计划进行灵活调整,提升运营日计划管理的水平。
3.3 定位管理
系统基站以超宽带定位技术与车载定位设备为技术手段,对进入车厂车辆进行精准定位,并使车辆状态在车厂控制中心的监控屏幕上能够实现实时更新。借助安装在铁鞋等车厂内关键设备上的定位设备,系统基站能够精准定位这些关键设备的位置,并调整其摆放位置。佩戴安全帽和胸牌等定位设备的作业人员及检修人员,同样能够实现和系统基站进行通信,并且能够在车厂控制中心的监控屏幕上实时更新其位置和状态,防止未授权人员进入现场,提高生产作业和检修作业的安全性。
3.4 施工作业管理
车厂智能生产管理系统能够快速、高效、自动生产车厂当日的检修计划工单,值班人员能够借助移动终端远程设备查看核对检修人员,并且可以一键派发检修计划工单。系统以当值检修人员的专业资格、经验为参考,同时考虑车辆检修工作的工作量和检修难度,合理分配检修任务,完成车辆检修计划工单的派发。
派发完工单且车辆检修完成关闭工单后,车厂智能生产管理系统就自动生成车辆电子维修履历,便于判断车辆寿命周期和后期的检修工作。
3.5 智能移动终端应用
智能移动终端的应用使得工作人员可以直接利用手持移动终端完成检修工单的填写、申请等,可以扫描二维码,直接对应设备的检修任务单,简化登车作业审批、请销点及断送电等检修流程,提升车辆检修的智能化和无纸化水平。同时,智能移动终端的应用丰富了故障上报形式,从简单的文字记录完善到拍照、音频等,提供实时查询车辆状态的条件,掌握实时的车辆状态信息和检修数据,查看车辆历史故障的处理[2]。
4 智能专家诊断系统
4.1 车载数据采集
车载状态监测设备的主要任务是实时动态监测车辆关键系统和关键部件的运行状态,实时更新车辆运行状态,这一设备由传感器、多功能车辆总线(MVB)网络等部件构成,其数据传输依靠5G等车地无线传输方式实现。
4.2 数据趋势判断
车载状态监测设备能够实时收集车辆的状态信息,智能专家诊断系统能够比较实时的车辆状态信息与车辆关键系统、关键部件的历史数据,绘制记录图表,并对车辆状态的数据进行科学全面分析。
运行区间车辆右轨振动数据如图3所示。

图3 车辆轮轨振动记录
分析图3可以发现,在区间K25+292~K25+400中,车辆轮轨的最大振动有效值为74.284 mm/s2,波磨路段的振动频率为400~450 Hz,虽然没有超出车辆智能专家诊断系统所设定的范围,但结合该轴的历史数据分析图表,可发现振幅较大,最后发出报警提醒,检修维护人员接收报警提醒后应及时展开车辆走行部的检修作业。
4.3 异常状态检测
车辆智能专家诊断系统的工作原理为选择影响车辆运转的关键因素,全面收集影响车辆运转的过程变量,以全部车辆状态数据为基础,统计不同区段模拟量数据,再提取不同区段的各类参考数和区间特征值(如最大值、最小值),利用相应算法完成数据重组。最后,车辆智能专家诊断系统会选择同类车辆及其相关状态数据、故障判定的标准作为参照和学习样本,利用无监督机器学习算法对城市轨道交通车辆进行数据检查,判断车辆是否出现异常情况[3]。
4.4 故障预测方法
系统故障预测应以故障数据点作为基础,并应用监督机器学习方法。先选择数据进行标记和处理,以时间窗为段;再按照数据处理流程对数据进行归一化和均衡化处理,形成数据集,并根据故障预测的需要将数据集划分为训练集和测试集;以机器学习算法为学习方法,让系统在训练集中进行故障预测,建立故障预测的模型,实现对数据异常的反映,保证系统检测到数据存在连续异常时,能够自动发出报警信号。
5 结语
城市轨道交通车辆智能运维系统优势突出,在城市轨道交通车辆中应用智能运维系统,不仅能够提高车辆检修的效率、延长车轮等设备的使用寿命,还能够控制检测维修费用,节约人力成本,提高车辆检修的安全性。
猜你喜欢
铁道通信信号(2019年8期)2019-10-10
汽车杂志(2019年3期)2019-03-26
当代工人(2019年24期)2019-01-17
测控技术(2018年9期)2018-11-25
汽车杂志(2018年5期)2018-06-25
电子制作(2016年19期)2016-08-24
设备管理与维修(2016年5期)2016-03-16
汽车零部件(2016年12期)2016-02-23
新疆钢铁(2015年2期)2015-11-07
中国石油石化(2015年12期)2015-04-20