山区城市道路匝道段纵向视错觉减速标线影响研究
2021-05-13 03:15:42尚婷白婧荣
中外公路 2021年2期
尚婷, 白婧荣
(1.重庆交通大学 交通运输学院, 重庆市 400074; 2.重庆交通大学 土木工程学院)
1 前言
山区道路由于受地形条件限制,在公路上多有急弯陡坡等特殊路段,在城市道路中交叉口多存在畸形交叉口,坡度较大,分合流情况复杂。在山区道路的视距不良路段,线形指标通常较低,行车环境复杂。道路线形的复杂程度对车辆行车状态具有十分重要的影响,当行驶道路的线形不良时,车辆行车状态会频繁发生变化,也会增加驾驶员行车的危险性。驾驶员在弯道行驶时容易发生占道行为,造成追尾、刮擦等事故。
2010年,Sunanda Dissanayake研究不同的平曲线及路面标线会改变车辆行驶轨迹;2012年,Michelle L. Rusch等研究得到增强现实线索,可以减少驾驶员反应时间,增加危险检测的可能性;2014—2016年高振海等采用非侵入式眼动仪从视觉搜索广度、换道前预瞄距离、视线转移概率等多角度分析车辆以不同的行驶速度变换车道时的驾驶员眼动特征,丰富了换道辅助驾驶系统的理论依据;冀秉魁建立了不同场景下的驾驶行为预测模型,使得驾驶行为预警系统更加实用化;田晶晶、李世武等分析出驾驶员视认难度系数随着隧道长度的增加和环境复杂程度的增加而变难,其中眼动指标中注视点最为突出;2014年,吴立新研究了不同车型在不同的平曲线半径下的车辆行驶轨迹偏移量;2014年康建设对山区旅游公路的车辆行驶轨迹变化特性进行测量分析,并给出弯道行车的安全防治措施;2016年,胡爱秀利用仿真试验发现鱼刺形减速标线的闪现率、可视性和刺激强度均大于边缘率减速标线,适用于缓弯、缓坡路段和车流量小的交汇口;2016年,尚婷等通过实车试验采集数据分析了视错觉减速标线横向宽度和角度对车速变化的影响;2018年,孙吉书等推导出高速公路凹形竖曲线段防眩板高度计算公式,系统分析了竖曲线半径、前灯眩光照距等因素对凹形竖曲线段防眩板设置高度的影响特性。
行车环境对驾驶安全有着重要影响,驾驶员通过车速仪表盘和车外参照物来判断行车速度的快慢程度,并且在下雨、降雪、大雾等恶劣的天气里行车时,很难看清楚视野边缘作为衬托车速移动的景物,很容易把车速估计得较低。在匝道出口路段,由于交通标志和标线的设置影响着车流的稳定性,如果匝道限速值与主线限速值相差较大或驶出匝道的设置长度过短时,很容易使想要驶出主线的驾驶员采取紧急制动降低行车速度,更甚者导致后车驾驶员反应时间太短而产生追尾事故。横纵向视错觉减速标线主要是通过设置不同间距、长度和宽度的图案,使行驶的车辆在横跨车道时轮胎碾压有明显凹凸感觉,并利用视觉错觉使驾驶员产生前方道路变窄的错觉,从而达到主动降低车速的目的。因此,在山区道路互通匝道处施划纵向视错觉减速标线可以通过驾驶员的视觉来传递减速信息。
该文以重庆市鹅公岩大桥出口匝道进行实车试验,利用眼动仪对驾驶人视觉的精确追踪,观察驾驶人在经过纵向视错觉减速标线路段和一般路段时的眼动特征,记录车辆行驶数据及其驾驶员相关眼动数据;利用无人机对试验道路的交通流特性进行采集,获得交通流量、车型比例、车头时距和试验车辆轨迹横向偏移量等数据,再对试验所得数据进行分析,得出驾驶人注视行为特征、瞳孔变化规律和车辆行驶轨迹特征。
2 试验设计及数据采集
2.1 试验道路选择
通过综合考察后选取重庆市鹅公岩大桥的出口匝道作为实例进行分析,选取布设纵向减速标线的匝道段为试验路段,减速标线布设长度为120 m,布设位置为道路ZH点到HZ点;对比路段为与之相邻的内侧匝道,其中试验路段与对比路段的匝道设计参数一致,可以尽可能减小因道路设计因素带来的试验误差。对鹅公岩大桥试验匝道和对比匝道的纵向坡度、超高和地形图进行测量,此匝道为双向两车道,车道宽度4 m,道路宽度6 m,纵坡坡度5.204%,匝道转弯半径60 m,由于鹅公岩匝道为重庆南岸区通往九龙坡区的主要通道,在高峰时期车辆十分拥堵,此时减速标线并不能发挥理想效果,因此,该文利用航拍视频录制自由流状态下的交通流量视频,在120 m长度布设减速标线试验路段,车型组成主要为小型客车和中型货车,对基本所需数据的计算得到至少需要35个试验样本量,该文对测得的73辆小客车进行分析,其区间速度平均值为30.99 km/h,对比路段200 m通过的44辆标准小客车的区间平均速度为33.86 km/h,根据超高计算公式,取μ=0.20代入公式计算,得到超高值为7.42%,计算得到其合成坡度为9.06%,满足规范要求。匝道出口的车速限制可以保证车辆运行速度的均匀性和交通流稳定性,此匝道出口的减速路段设置纵向减速标线,可以提前提醒驾驶员在驶出匝道前进行充分的减速,减小前后车辆之间的运行速度差值,避免发生追尾事故。
2.2 试验设备
试验中主要用到4种仪器设备,分别为行车记录仪、无人航拍机、眼动仪和坡度计。行车记录仪能够记录的数据相对来说精度较高,且可以录制行驶过程中所有的视频状态,信息比较全面,可以为后期试验校对时间与路段位置的一致性,也可以确定行车地点和驾驶周边的环境。精灵4pro无人机的感应系统为视觉定位系统和前视障碍物感知系统;支持APP控制。坡度计用于测量试验路段的坡度。Smart Eye型眼动仪可以用于记录试验过程中驾驶员的眼动指标的变化,以文本文档和视频形式保存,再通过配套分析软件Begaze来分析注视和扫视行为数据,简化试验数据分析过程。
3 交通特性分析
3.1 区间速度
速度描述统计量数据见表1。

表1 速度分布描述统计量
由表1可知:鹅公岩大桥试验匝道的速度样本数为73个,满足样本量的要求;对比试验路段和对比路段的P-P图(图1),验证真实数据和待检验分布的累计概率,检验其是否符合正态分布。
表1表明:① 对比路段速度的标准差7.27 km/h大于试验路段速度的标准差5.94 km/h,即对比路段的速度分布较为离散,其大部分的数值和其平均值之间差异较大;② 对比路段速度的均值33.86 km/h大于试验路段速度的均值30.99 km/h,说明在同样的道路环境下,在匝道设置纵向减速标线可以使区间速度的均值降低8.48%。对比路段与试验路段的V15相差不大,V85相差较大,试验路段的V85相对对比路段V85降低了14.99%。
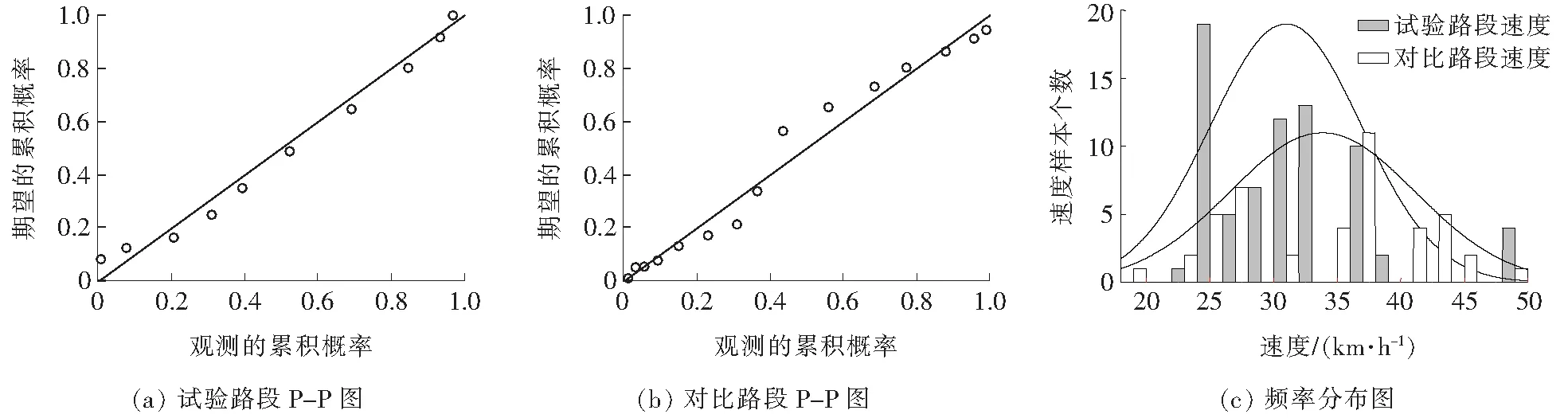
图1 速度正态P-P图和频率分布图
3.2 车头时距
车头时距描述统计量见表2。
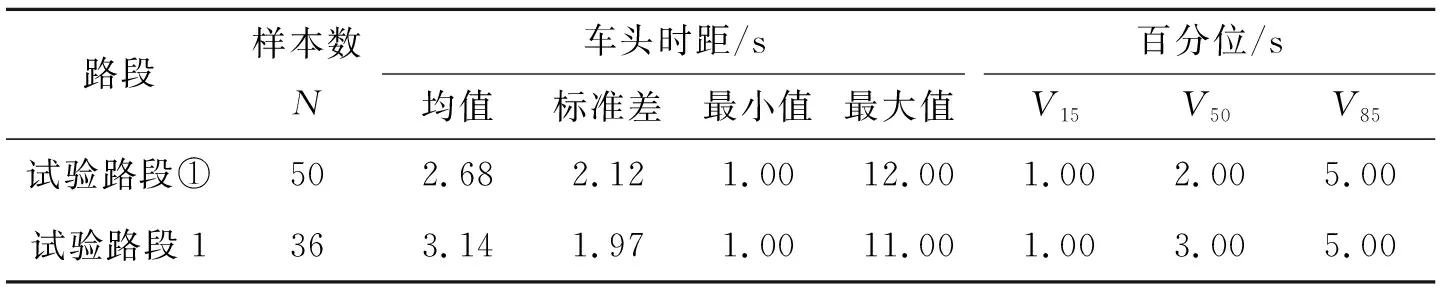
表2 车头时距描述统计量
试验路段有效样本数为50,样本均值为2.68 s,标准偏差为2.12 s,中值为2.00 s,对比路段的有效样本数为36,样本均值为3.14s,标准偏差为1.97 s,中值为3.00 s,对试验路段和对比路段的PP图(图2)验证真实数据和待检验分布的累计概率,符合正态分布。研究表明:由于此试验路段为双车道匝道,不同车道上的车辆之间影响较小,设置纵向减速标线对此匝道路段的车头时距无显著影响。
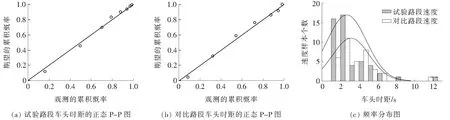
图2 车头时距正态P-P图和频率分布图
4 生理行为指标分析
4.1 注视区域划分方法
为了能够使驾驶员识别到更多的信息获取充足的道路环境状态来保证安全行驶,驾驶员在行驶时需要关注道路上的各种目标。然而,由于并不是所有的目标都会影响到驾驶员的行车安全,因此,驾驶员往往会选择性反复关注特定的几个感兴趣目标。为了能够更加充分地研究驾驶员的眼动特性规律和视觉搜索模式,该文选取机械划分法的原理结合眼动设备采集的注视点数据,利用逐一统计和k均值动态聚类的方法来分析驾驶员视觉特性。动态聚类法的具体过程如下:
第一步:初始化。选择对象集X,按照指定的聚类类别个数k,在X中按照需要的k作为初始聚类中心,设置迭代中止条件,迭代时首先进行相似度计算:
(1)
式中:cj为第j个聚类中心,而d(xi,cj)是聚类中心cj与样本xi之间的距离。距离的计算采用闵可夫斯基公式:
(2)
第二步:进行迭代。
第三步:更新聚类中心。
第四步:重复上述第二和第三步。
综合分析,根据目前已有研究的驾驶员视野平面划分方法,该文基于动态聚类算法,以驾驶员视觉视线点为基础,再根据道路线形、车辆结构特性和驾驶员的驾驶特性,对驾驶员视野平面进行了划分。
4.2 注视区域划分和注视点分布规律研究
通过注视区域划分方法的方法,利用注视点逐一统计和视野平面划分的方法,将眼动仪统计到的注视点进行聚类分析,选取合适的聚类个数,结合驾驶员行车过程中的视觉特性,该文根据拉依达准则法和标准化数值对眼动数据进行剔除,通过SPSS软件得到相应驾驶员眼动数据对应的均值和标准差,得到剔除异常数据后的可分析眼动数据,根据驾驶员注视点分布规律和实验车辆环境特性,通过Origin软件的k均值聚类,对处理后的眼动数据选取6类k均值聚类对视线点坐标(x,y)进行了聚类分析,聚类结果见表3;根据聚类结果画出的不同驾驶员行驶在鹅公岩大桥的视线点坐标(x1,y1)、(x2,y2)聚类见图3。
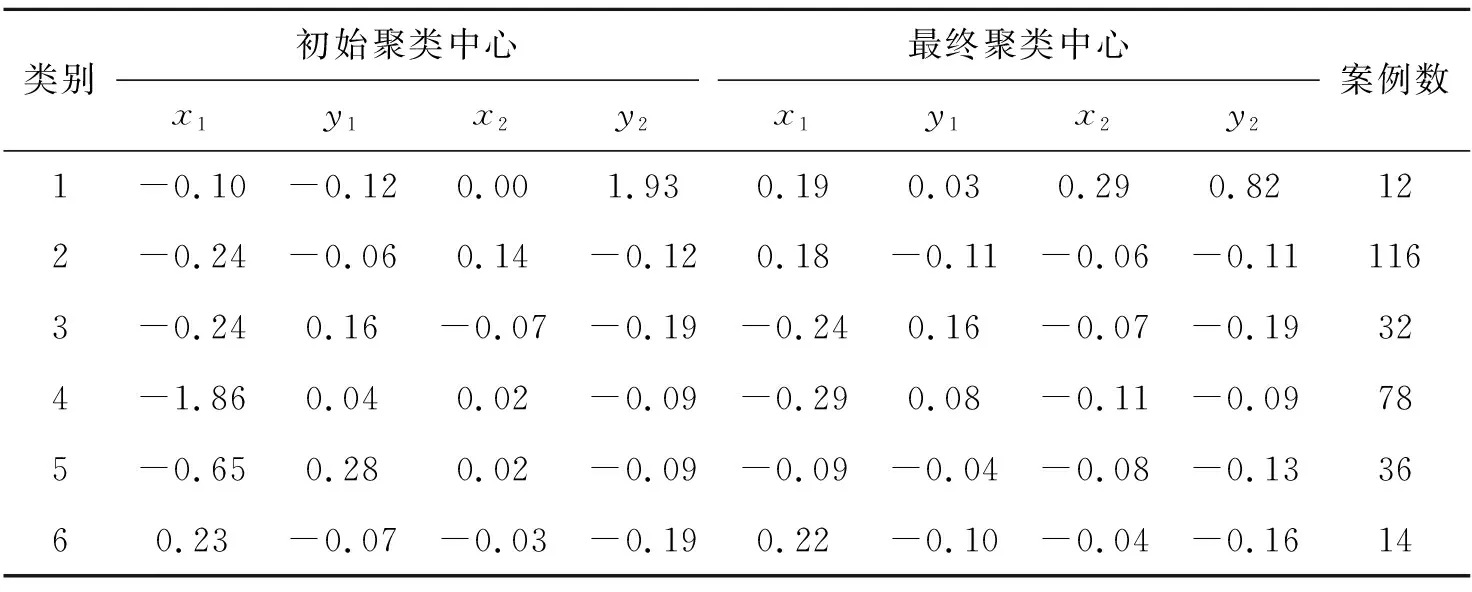
表3 鹅公岩大桥匝道注视点聚类中心
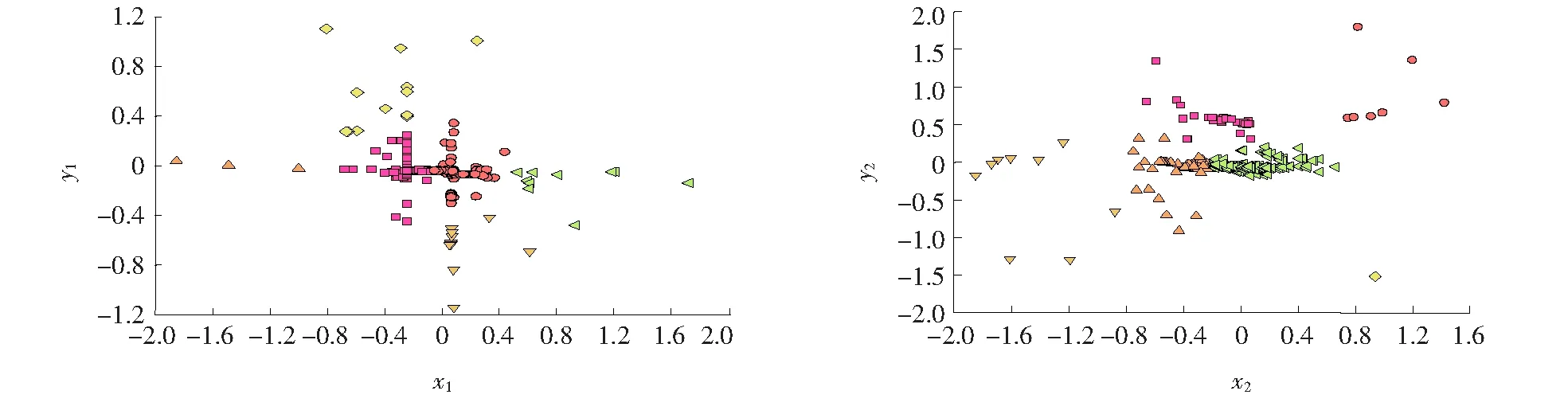
图3 鹅公岩大桥匝道纵向减速标线注视点坐标x-y密度图
通过分析最终聚类结果发现,驾驶员视线点在其视野范围内呈一定分布规律,因此,结合车辆结构和道路线形,按照试验路段的不同驾驶员注视点汇总分析,将驾驶员前方视野平面划分为左前方、右前方、左远前方、右远前方、近前方和远前方6个区域,其具体含义是:左前方(紫色框):驾驶员视线左侧道路轮廓;右前方(橘色框):驾驶员视线右侧道路轮廓;左远前方(绿色框):驾驶员视线左侧上方道路环境;右远前方(蓝色框):驾驶员视线右侧上方道路环境;近前方(白色框):驾驶员视线注意点;远前方(黄色框):驾驶员视线上空及远处道路环境。
在不同的道路线形和环境下,驾驶员的视点分布主要是在道路左右两侧远近不同的道路轮廓及线形走向和道路前方远近不同的道路环境上,因该文的异常数据筛选的方法选取,将少量的视点因变更车道和超车而落在车辆的左右两侧后视镜上的数据剔除了,且后视镜处的视点对该文研究的减速标线影响不大,所以对此不做分析。
通过对各路段注视区域平面划分的结果分析,可以看出该文研究的减速标线主要落在近前方(白色框)区域。当处于左转道路时,视点落在左侧的频率大于右侧,当处于右转道路时,视点落在右侧的频率大于左侧,当处于直线路段时,视线点落在前方的频率稍大一些。驾驶员在右转弯时主要注意内路边缘,左转时注意外路边缘,驾驶员注视行为在曲线路段和平直路段上存在显著差异,对驾驶员视点数进行统计计算,得到驾驶员的视点在标线所在区域的占比,即减速标线所在区域的视点数除以总的视点数。人的眼动行为可分为注视、扫视和眨眼3种,其中注视是表示关注目标的行为。注视时间百分比是驾驶员产生的所有注视行为的时间与产生所有眼动行为的总时间的比值,其反映了某一时间段内驾驶员的注意力集中程度。鹅公岩大桥由于匝道线形复杂和周围环境的单调,在设置减速标线的区域视点占比较多,为40.28%。
5 轨迹指标分析
通过对试验中录制的视频进行分析,该文主要针对小客车的行驶轨迹,按照30帧/s(图4)的频数划分数据采集断面A-G,再结合数据采集断面对车辆轨迹横向偏移量D(t)(假设视频中的车辆为一个质点,其横向偏移量为质点到车道边缘线的距离)进行标定和数据采集,具体数据见表4、5。
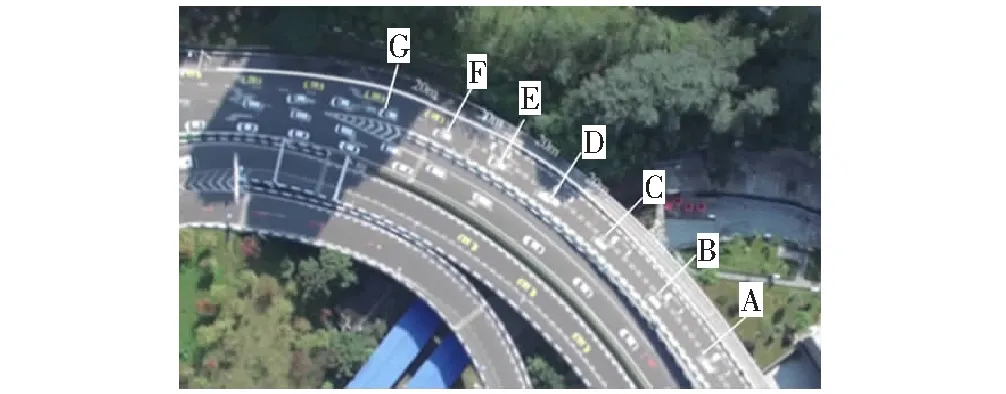
图4 纵向减速标线试验路段数据采集点

表4 试验数据统计分析结果
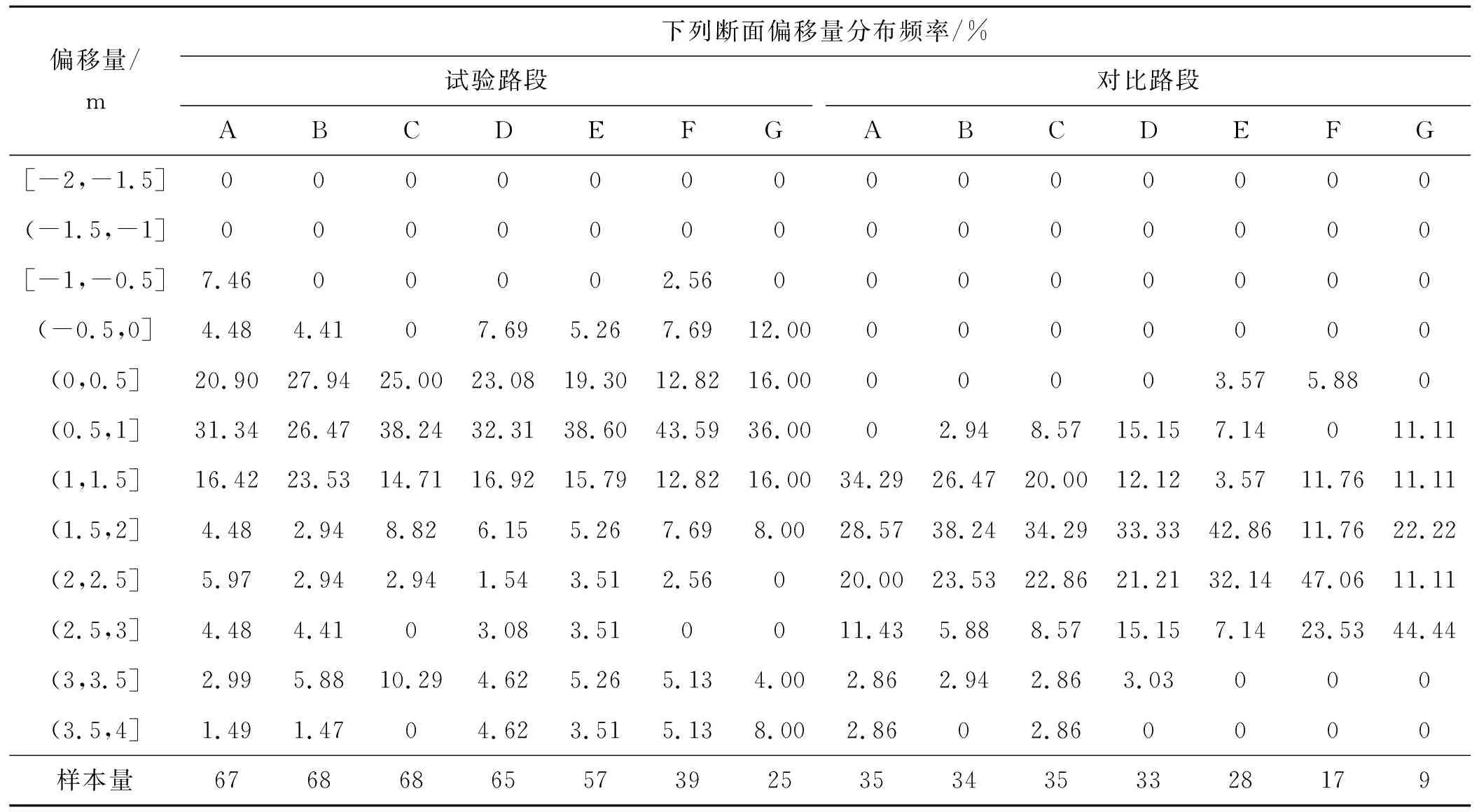
表5 鹅公岩大桥试验路段、对比路段小型车行驶轨迹偏移量频率值
对试验路段的轨迹横向偏移量进行统计分析,可以发现鹅公岩大桥设置减速标线后的第85百分位值要小于未设置的对比路段,鹅公岩大桥试验路段均值小于对比路段均值,说明设置横向减速标线使得山区城市道路匝道路段轨迹横向偏移量的离散程度降低。
对鹅公岩大桥试验路段和对比路段的轨迹横向偏移量进行统计分析,可以发现:在试验路段7个不同断面的轨迹偏移统计中,A、C、D、E、F和G断面偏移量分布频率最大值31.34%、38.24%、32.31%、38.60%、43.59%和36.00%均在(0.5 m,1 m]区间内,B断面偏移量分布频率最大值27.94%在(0,0.5 m]区间内,其次偏移量分布频率值26.47%也在(0.5 m,1 m]区间内;说明大部分车辆在设置减速标线的路段行驶时,其轨迹偏移量一般在0.5~1 m范围内;未设置减速标线的对比路段A断面偏移量分布频率最大值34.29%在(1 m,1.5 m]区间内,B、C、D和E断面偏移量分布频率最大值38.24%、34.29%、33.33%和42.86%均在(1.5 m,2 m]区间内,F断面偏移量分布频率最大值47.06%均在(2 m,2.5 m]区间内,G断面偏移量分布频率最大值44.44%均在(2.5 m,3 m]区间内,说明在未设置减速标线路段的大部分车辆在进入鹅公岩匝道时,其轨迹偏移量逐渐增大,由1~1.5 m区间逐步地稳定过渡到1.5~2 m范围,在驶离匝道时,其轨迹偏移量较为离散,增大到2~3 m的范围。因此,设置减速标线可以缩小车辆在匝道行驶时的横向偏移量,规范车辆行驶轨迹线路。
6 结语
采用统计分析方法对试验路段和对比路段的试验数据进行分析,得到鹅公岩匝道路段的基本线形参数,如超高、合成坡度值和道路宽度等,根据实地情况对试验段的交通流特性、驾驶员生理行为指标和轨迹规律进行分析,其中交通流特性主要包括一定时间内通过试验段的交通流量、区间速度和不同车型的速度对比分析,驾驶员生理行为分析主要包括注视区域划分、注视点分布变化规律,轨迹规律分析主要包括减速标线对轨迹横向偏移量的影响,试验表明:在匝道设置纵向减速标线可以使区间速度的均值降低8.48%,分布更为集中,对车头时距无显著影响,大部分车辆轨迹偏移量一般在0.5~1 m范围内,小于对比路段的1~1.5 m;驾驶员视线点在其视野范围内呈一定分布规律,因此,利用聚类分析结合车辆结构和道路线形,将驾驶员前方视野平面划分为左前方、右前方、左远前方、右远前方、近前方和远前方6个区域,鹅公岩大桥匝道段视点占比为40.28%。总之,在匝道路段设置纵向减速标线可以提前警告驾驶员控制车速,提高匝道行驶安全性。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27 06:35:38
地理空间信息(2022年3期)2022-04-01 14:16:14
中学生数理化·中考版(2021年9期)2021-11-20 06:17:36
中国交通信息化(2020年4期)2021-01-14 01:31:16
西南交通大学学报(2018年6期)2018-12-18 02:23:20
上海公路(2018年4期)2018-03-21 05:57:46
中国交通信息化(2018年11期)2018-03-01 05:43:42
制造技术与机床(2017年7期)2018-01-19 02:29:53
测绘工程(2017年3期)2017-12-22 03:24:50
中国公路(2017年14期)2017-09-26 11:51:45