颈椎旋提手法教学机器人用于旋提手法规范化培训的自身对照研究
2021-05-12 02:03霍路遥符碧峰冯天笑卜寒梅苏瑾吴思李远栋王平冯敏山杨光
中国中医骨伤科杂志 2021年5期
霍路遥 符碧峰 冯天笑 卜寒梅 苏瑾 吴思 李远栋 王平△ 冯敏山 杨光
目前神经根型颈椎病(CSR)以保守治疗为主,中医手法治疗是有效的治疗手段[1-3]。颈椎旋提手法由朱立国教授创立,经临床研究证实确有疗效[4-5],但手法技术的传承训练难以规范统一。众多研究者从运动学角度分析手法操作特征,基于此方面前期研究,并以王平教授负责的“国家中医药管理局中医药循证能力建设项目”为契机,对旋提手法教学机器人在颈椎旋提手法规范化培训中的效果进行分析,以期为旋提手法的规范化提供参考,为后续多中心临床研究打下基础。
1 资料与方法
1.1 研究对象
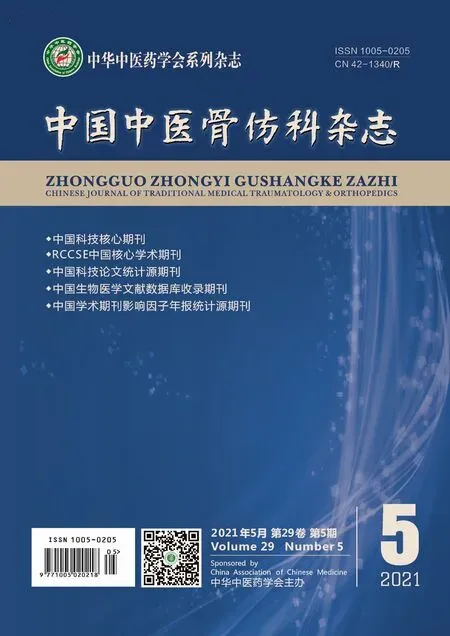
选取天津中医药大学第一附属医院以及天津、甘肃、山东、内蒙古、陕西、江苏、广东、吉林等地各协作单位中已熟练掌握颈椎治疗手法且临床工作5 a以上的20名骨伤科医师作为培训对象,进行自身前后对照研究,20名医师均未接受过颈椎旋提手法教学机器人进行培训;以颈椎旋提手法教学机器人(见图1)为固定的培训设备。
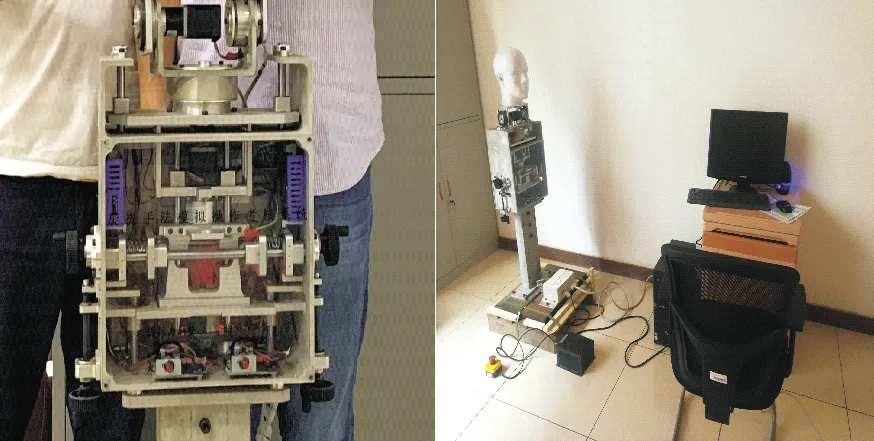
图1 颈椎旋提手法教学机器人装置
1.2 方法
选取已熟练掌握颈椎治疗手法且临床工作5 a以上的20名骨伤科医师,先通过旋提手法教学机器人采集每位医师在体质量指数(BMI)设定为正常状态下的手法操作关键力学参数(预牵引为、提巧力、最大作用为、提扳时间、旋转幅度、俯仰幅度)。然后通过旋提手法教学机器人对20名医师进行2周手法规范化培训,培训后再次使用该系统进行考核并采集数据。比较培训前和培训后总合格率、合格次数、标准差(S)、变异系数(CV)等数据指标,以客观评价颈椎旋提手法教学机器人在手法操作规范化培训方面的作用效果。
1.2.1培训内容 以颈椎旋提手法规范化操作步骤(国家中医药管理局百项中医临床实用技术推广项目)为操作规范。
2)让患者的头部水平旋转至极限角度,最大屈曲,然后再旋转达到有固定感。
3)医生以肘部托患者下颌,轻轻向上牵引3~5 s。
4)嘱其放松肌肉,肘部用短力快速向上提拉,操作成功可以听到一声或多声弹响。
5)应用提、拿等手法再次将颈肩部肌肉放松1~2 min。
1.2.2培训方法 对20名医师通过视频演示及PPT教学,讲解颈椎旋提手法的操作要点,然后并在旋提手法教学机器人装置上进行训练。每位医师每天训练5次,每周训练5 d,共训练2周。
1.2.3操作过程 每位医师均在正常体质量指数状态下,依照操作规范各进行3次操作(见图2),对每次操作的6项核心指标(预牵引力、提扳力、最大作用力、提扳时间、旋转幅度、俯仰幅度)和考核成绩进行记录,记为培训前考核结果(见图3)。随后对20名医师进行颈椎旋提手法操作规范化培训,同前方法进行考核,并记录相关数据。
(1)国际市场环境不稳定。民营企业的发展受国际市场环境的影响较大,对于一些外向型的民营企业来说,国际市场环境波动和国际关系的好坏影响着企业的生死存亡。
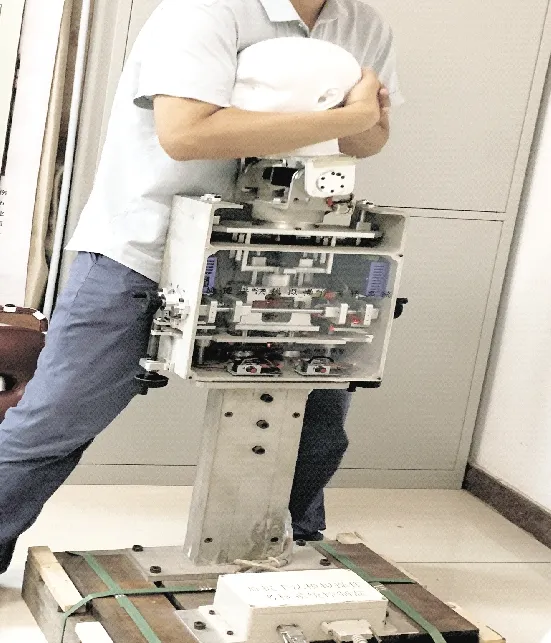
图2 培训人员操作
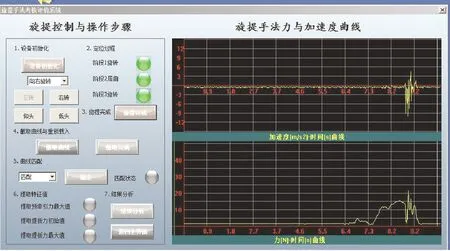
图3 操作中力与时间曲线
1.2.4手法合格判定 培训前与培训后合格判定方法一致。将相应的力学指标在考核系统中进行了设置,参考指标如下[5]。
1)体质量指数19~23(正常人群)的参考值范围:预加载力为(142.10±47.75)N,最大作用力为(227.95±61.45)N,扳动力为(116.91±37.53)N。
2)体质量指数23~25(超重人群)的参考值范围:预加载力为(170.62±31.16)N,最大作用力为(262.40±40.18)N,扳动力为(131.03±25.77)N。
3)体质量指数>25(肥胖人群)的参考值范围:预加载力为(200.51±39.40)N,最大作用力为(341.53±54.68)N,扳动力为(155.13±34.30)N。
4)扳动时间控制在200 ms以内。
5)扳动前后受试者的颈部旋转角度差值<4°。
每3次操作中,至少2次合格,则判定本次考核合格(见图4)。

图4 数据输出界面
1.3 观察指标
每次考核过程中的预牵引力、提扳力、最大作用力、提扳时间旋转幅度、俯仰幅度的测量值、合格率、标准差和变异系数。
1.4 统计学方法

2 结果
2.1 培训前后总合格率的比较
培训前总合格率为25%,培训后总合格率为90%。经χ2检验,χ2=17.289,P<0.05,提示培训前后总合格率的差异有统计学意义,培训后总合格率明显高于培训前(见表1)。

表1 培训前后总合格率比较
2.2 培训前后合格次数比较
经W检验,培训前和培训后P<0.05,不符合正态分布,故采用两相关样本非参数检验。培训前合格次数为1.30(1,1.75),培训后合格次数为2.50(2,3),经检验Z=-3.510,P<0.05,提示培训前后合格次数的差异有统计学意义,培训后合格次数高于培训前(见表2)。

表2 培训前后合格次数
2.3 培训前后关键力学指标合格率比较
培训前预牵引力合格率为73.3%,提扳力合格率为36.7%,最大作用力合格率为26.7%;培训后预牵引力合格率为95.0%,提扳力合格率为91.7%,最大作用力合格率为90.0%。经χ2检验,培训前后比较的χ2分别为10.568、39.468、49.509,P均<0.05,提示培训前后各项力学指标合格率的差异有统计学意义,培训后各项力学指标合格率明显高于培训前。经χ2检验,培训前后的提扳时间、旋转幅度和俯仰幅度差异无统计学意义(见表3)。
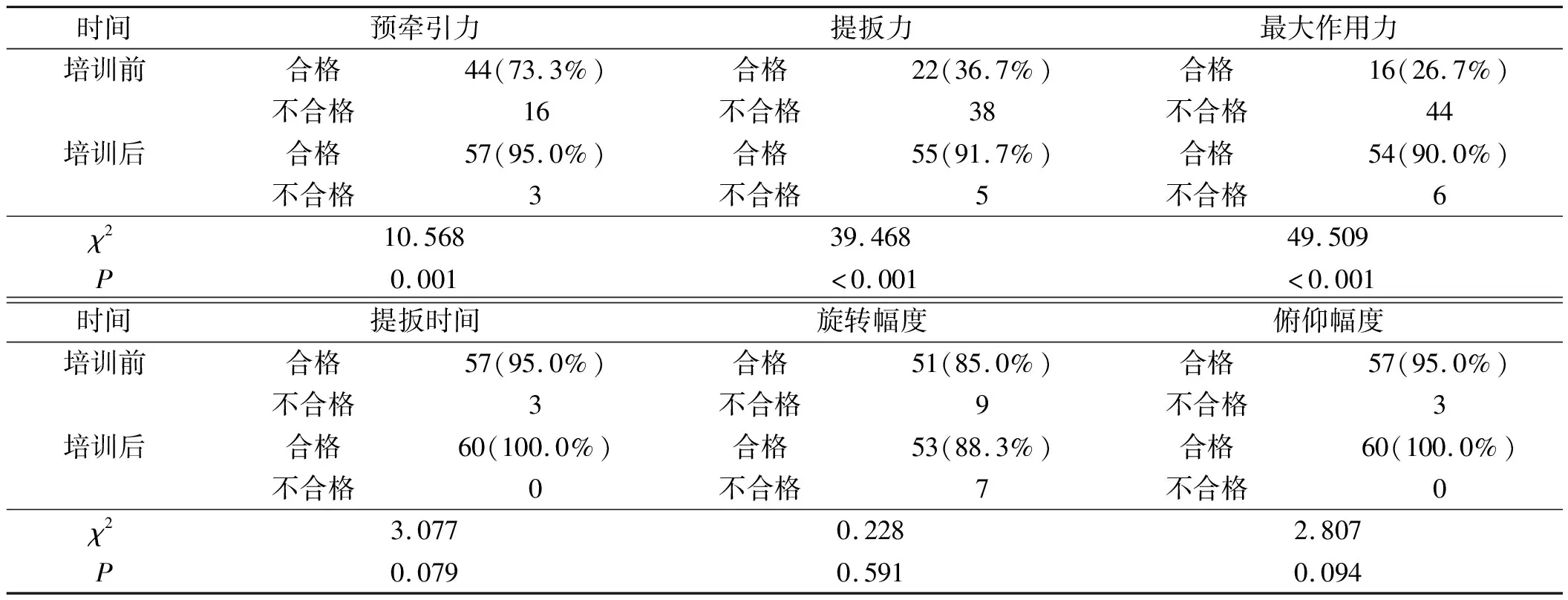
表3 培训前后关键力学指标合格率(次)
2.4 培训前后关键力学参数的统计学描述
培训前预牵引力为(15.41±5.42)N,提扳力为(9.75±4.77)N,最大作用力为(19.15±6.72)N,CV分别为0.325、0.489、0.351;培训后预牵引力为(16.46±1.44)N,提扳力为(9.98±1.99)N,最大作用力为(26.7±3.72)N,CV分别为0.087、0.199、0.139,可见培训前各项参数的标准差和变异系数明显大于培训后(见表4)。说明培训后的各项力学参数更加稳定,每位医师的操作较培训前更加规范统一(见图5)。
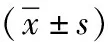
表4 培训前后关键力学参数
图5 培训后多次操作力学曲线
3 讨论
科学技术的发展和学科之间的融合为手法医学研究带来了方法学的重要突破,国内外研究者对手法操作的力学指标进行量化和数学模型重建[8-11],分析得到力学曲线,总结出操作成功的要素,对于制定规范统一的考核标准和教学模式有重要意义。有研究者将教学模拟器、虚拟现实(VR)技术等应用于临床教学及考核[12-14],通过更加客观、可量化的手段将抽象的知识结构展示出来,进行针对性的训练。中国中医科学院望京医院的众多学者通过物理学、运动学方法对手法操作进行量化研究,总结出了操作过程中的关键力学参数和运动轨迹,概括了旋提手法的力学特征,前期研究结果表明左右手操作无差异,作用力的大小与患者体质量指数的变化相关,并得出不同体质量指数下的各项作用力大小的范围[15]。本研究使用的教学机器人是中国中医科学院朱立国教授等联合研发的模拟器,主要由头部模型、颈部模拟装置、脊柱模拟装置和控制系统组成,机械设计从外形、颈部功能、颈部在旋提手法操作过程中的力学变化等方面入手,选择运动和连接方式、确定机械的自由度、确定连杆参数和关节变量;根据临床手法力学及运动力学数据,设计3种机械状态以模拟3种不同体型(正常、超重、肥胖)在旋提手法过程中的力学变化,尽可能模仿人体头颈部在旋提手法过程中的受力特性;控制系统包括力学信号的实时检测系统、力学参数评价分析系统和人机调控系统[16-17]。在旋提手法量化研究的基础上,对旋提手法教学机器人进行研发和临床应用研究,结果表明该方法用于手法培训稳定可靠,明显优于传统方法[18-19]。
中医骨伤科手法历史悠久[20],但正骨手法有操作的风险性,在学习传承上多采用“口口相传,手手相授”的传统方式,强调“手摸心会”,操作时力的大小、方向、速度需要在缓慢的学习过程中领悟和摸索;再加上颈椎旋转类手法存在一定的风险,初学者实际操作的机会少,使得学习效果难以得到客观、规范、统一的检验,行之有效的手法技术难以实现推广应用;由于学习、训练的方法不同,临证之时也难以做到规范统一。本研究结果显示:培训前20名医师预牵引力、提扳力、最大作用力的标准差(5.42、4.77、6.72)和变异系数(0.352、0.489、0.351)较大,组内同质性低,说明每位医师操作时的发力存在着较大的差异。一方面,由于培训前每名观察对象已经有多年临床操作经验,且以旋扳手法为主,形成了肌肉记忆,因而实施颈椎旋提手法时难以掌握动作要领;另一方面,所选观察对象来自全国各地,所受的手法技术培训及训练方法各不相同,无统一规范的教学和考核方法,这是培训前力学参数同质性较低的重要原因,反映出对旋提手法操作进行规范化培训的必要性。
在合格率和合格次数方面,本研究结果显示培训前20名医师的考核总合格率为25.0%,合格次数为1.30(1,1.75),明显低于培训后的总合格率(90.0%)和合格次数(2.50(2,3));培训前预牵引力、提扳力、最大作用力的合格率分别为73.3%、36.7%、26.7%,明显低于培训后的95.0%、91.7%、90.0%,差异有统计学意义(P<0.05),培训效果良好。培训前后的提扳时间、旋转幅度、俯仰幅度的合格率均较高,差异无统计学意义(P>0.05),说明旋提手法操作过程中难以掌握的部分为力量大小的控制,尤其是提扳力(合格率为36.7%)和最大作用力(合格率为26.7%),培训后提扳力(合格率为91.7%)和最大作用力(合格率为90.0%)的合格率明显提升,变异系数(CV提扳力=0.199、CV最大作用力=0.139)明显小于培训前(CV提扳力=0.489、CV最大作用力=0.351),组内同质性提高,说明经过旋提手法教学机器人训练,各位医师对操作要点的掌握更加准确熟练,操作更加稳定,体现出旋提手法教学机器人作为训练平台的优效性,在旋提手法规范化培训过程中有着良好的培训效果。标准差和变异系数方面,培训后预牵引力、提扳力、最大作用力的标准差分别为1.44、1.99、3.72,变异系数分别为0.087、0.199、0.139,明显低于培训前(S=5.42、4.77、6.72,CV=0.352、0.489、0.351),培训后的力学指标更加稳定,各项力学数据的离散程度低。说明使用教学机器人进行培训,可以使各位医师快速掌握颈椎旋提手法的操作要领,通过大量可重复的训练,达到稳定、规范、统一的要求。
本研究以颈椎旋提手法教学机器人为培训仪器,结果显示通过本方法进行教学、训练可实现手法的统一标准化,合格率高,培训效果良好,对手法技术的传承、推广有重要的意义。同时服务于本循证能力建设课题,为后期稳定旋提手法的力学特征要素,研究颈椎旋提手法的临床应用疗效打下基础。
猜你喜欢
现代畜牧科技(2021年9期)2021-10-13
快乐语文(2021年11期)2021-07-20
快乐语文(2020年36期)2021-01-14
快乐语文(2020年30期)2021-01-14
中学生数理化·高三版(2016年2期)2016-09-10
中学生天地(A版)(2016年5期)2016-05-14
中国卫生质量管理(2015年2期)2015-12-01
现代企业(2015年8期)2015-02-28
质量探索(2015年3期)2015-01-30
中国卫生(2014年5期)2014-11-10