CBTC 系统中列车动态头筛的研究
2021-05-10 08:55季坤
铁道通信信号 2021年4期
季 坤
目前,基于通信的列车自动控制系统(CBTC)成为我国城市轨道交通在营、在建甚至改造线路的主流信号系统解决方案。与固定闭塞或准移动闭塞系统相比,CBTC 系统最核心的原理为:区域控制器Zone Controller (ZC) 通过接收车载控制器Carborne Controller(CC)实时计算并发送的列车定位报告或联锁系统报告的物理区段(计轴区段)占用情况,为线路上所有列车(通信的装备列车、非通信的装备列车、非装备列车或工程车等)创建安全包络Safety Envelope(SE)。ZC 根据每个安全包络的位置及联锁系统发送的轨旁设备状态,向每列车CC 实时提供移动授权,从而实现移动闭塞下的安全防护。
对于由非CBTC 区域进入CBTC 区域的列车,或在正线存车线重新上电后投入运营的列车,或在正线因特殊原因失去定位的列车,在完成列车定位前,CC 无法给ZC 发送定位信息,ZC 只能通过联锁系统报告的物理区段占用情况,为这些列车创建“未识别的安全包络”(Non Identified Safety Envelope,NISE)。当这些列车完成定位时,只有ZC 将列车车头前方的NISE 经过筛选消除掉后,才能为本列车CC 提供有效的移动授权,从而以CBTC 模式运行。将这一消除车头前方NISE 的行为称之为“头筛”。本文将着重研究列车在运行过程中完成头筛(即“动态头筛”)的原理和效率。
1 NISE 的创建和跟踪
头筛的本质是ZC 在判断列车端头前方的NISE 没有其他列车或工程车后安全地消除此NISE,使本列车CC 可获得有效的移动授权,从而升级为CBTC 模式。因此,研究头筛功能必须先了解NISE 的创建、跟踪和分解原理。
ZC 会给未识别的列车创建安全包络NISE。由于这些列车无法提供实时定位报告,ZC 不能确切获悉这些列车的精确定位,所以只能通过计轴区段的占用情况来判定列车的模糊定位,即处于占用区段范围内。考虑到列车可能会在计轴区段内走行且处于占用状态的单个计轴区段内可能有多列车,ZC 会将整个计轴区段均覆盖NISE。随着列车运行,其前进方向的各计轴区段依次进行“空闲-占用-出清”,而NISE 也根据计轴区段状态变化跟随列车推进。NISE 的创建及跟踪过程见图1。
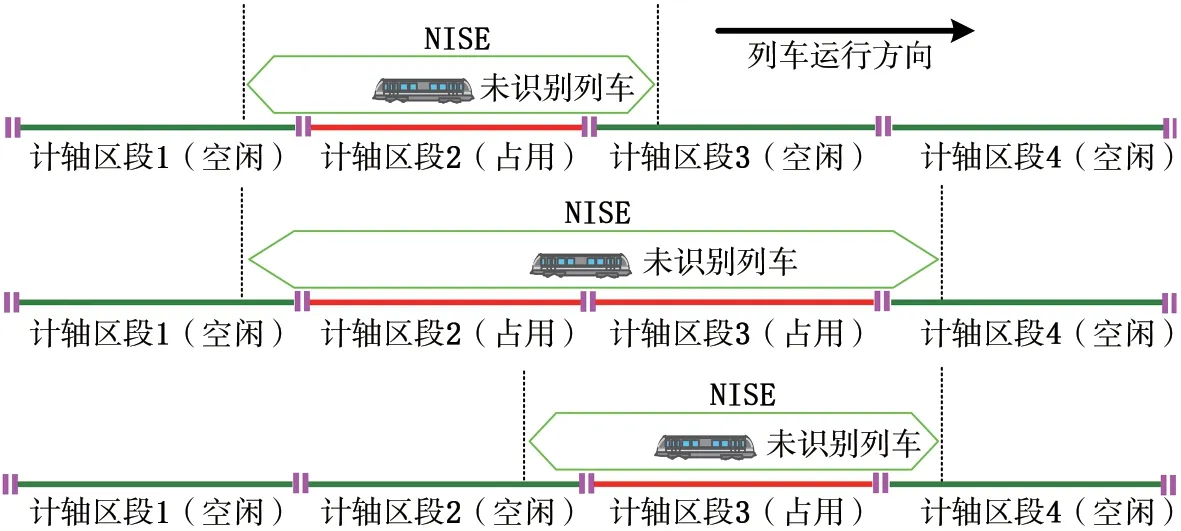
图1 NISE 的创建及跟踪过程
需要说明的是,NISE 的范围除了占用的整个计轴区段外,还包含向相邻空闲计轴区段的安全扩展距离。这一安全扩展距离是考虑了传送给ZC 计轴区段状态由空闲到占用的通信时延期间列车可能走行的最大距离。
2 NISE 的分解
当未识别列车连续通过2 个定位应答器后,根据读取的位置信息及先后通过顺序,即可确定列车位置及运行方向,从而实现精确定位。后续,CC根据速度传感器测算的位移量实时计算出列车的实际位置,并周期性地向ZC 发送列车定位报告。根据定位报告中的列车定位信息,ZC 再计算出一个安全包络。由于该安全包络是以通信传输的定位报告为基础,故称之为“通信的安全包络”(Talkative Safety Envelope,TSE)。
TSE 会在NISE 内部进行创建,从而将原有的NISE 进行分解,列车实际所在部分由TSE 覆盖,其余部分依然根据计轴区段的占用状态由NISE 覆盖。NISE 的分解过程见图2。
3 头筛原理
在以下几种运营场景下,列车在起始阶段未被ZC识别,由NISE覆盖;当车地通信正常且实现列车精确定位后,需要尽快地升级到CBTC模式投入正常运营。
1) 由非CBTC 区域(一般为车辆段、停车场)进入CBTC 区域的列车。
2)在正线存车线重新上电后投入运营的列车。
3)因特殊原因在正线失去定位的列车,例如TSE 包络的列车驶向失表的道岔。
4)ZC 重启后,该ZC 管辖区域内的所有列车。
然而,如图2 所示,无论该列车前端还是尾部的NISE 均不能随着TSE 的创建而被消除,这是因为此刻的ZC 依然无法判断原有的NISE 包络中是否有其他列车或工程车。ZC 虽然实时接收到该列车CC 发送的列车定位报告,但由于存在车头前方的NISE,其计算得出的移动授权无有效距离,从而无法升级为CBTC 模式运行。若此刻ZC 消除了车头前方的NISE,移动授权终点将沿运行方向大幅延伸,列车可立即升级成CBTC 模式,随之生成较高速度码,列车在手动驾驶或自动驾驶的ATP 防护模式下,会追尾原有NISE 内的其他列车或工程车,造成严重的安全事故。
因此,ZC 需要设计一套安全且高效的“头筛”判断逻辑。安全性的要求是指只有在确保NISE 中无任何其他车辆的情况下,才能将NISE 删除。高效率的要求是指“头筛”作业可以不停车完成且不限于个别特定地点。具体逻辑如下。
1)初始触发阶段:同时满足两个条件后,启动头筛功能。①在列车当前定位报告中,列车最小车头位置与计轴区段边界(即计轴点) 的距离小于D头筛。D头筛为头筛距离,取值为上线车辆的最小长度,通常是最短工程车的长度。②ZC 判定列车所在位置的下游计轴区段为空闲。
2)持续检查阶段:在T头筛这段时间内,条件①②在每个ZC 运算周期均同时满足。T头筛为头筛延时,取值为计轴磁头被车轴划过到ZC 判定该计轴区段已被占用的最大用时,考虑了最不利的情形之后,取计轴系统判断占用的最大延时、继电器接点落下的最大延时、联锁系统运算时间、ZC 运算时间、有线传输的最大延时、联锁变量的最大有效时间等之和。
3)最终判定阶段:T头筛过后的第1 个ZC 运算周期内,若条件①②依然满足,则ZC 立即消除NISE,头筛成功。
以上3 个阶段中,任意一个阶段不满足条件,则头筛失败。其中,D头筛和T头筛是根据线路情况预置的ZC 运算量。
T头筛是一个关键的安全时间,若在头筛原理中不予以考虑或取值过小,那么在两车追踪间隔较小的情况下可能会发生错误的头筛,即在车头NISE 尚有工程车或其他非通信列车的情况下,将NISE 消除。如图3,尚未完成头筛的列车头部NISE 内实际确有一辆工程车,工程车的车轴已经进入下一计轴区段。但由于传输及判断延时,ZC 依然认为下一计轴区段为空闲状态,而同时列车最小车头位置与计轴点距离小于D头筛。若此刻立即头筛,则工程车将无任何安全包络防护。因此,T头筛取值一定要充分考虑最极端的最大延时情况,确保ZC 有足够的时间真实判断下一计轴区段的空闲状态,从而正确决定是否执行头筛。
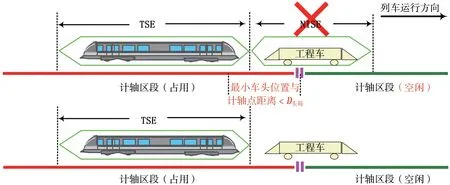
图3 不考虑T 头筛期间持续检查条件后的错误头筛
4 动态头筛的效率分析
当初始触发阶段同时满足条件①②后,系统立即开启头筛流程。在车头前方确无工程车或其他非通信列车的情况下,期望结果是成功头筛,从而升级为CBTC模式投入正常运营。若列车在T头筛这段时间内保持静止不动,则头筛的成功率为100%,这是因为静态列车不会对条件①②的持续成立产生任何干扰。
列车也可在运行中实现不停车的动态头筛。然而,由于列车位移是动态向前的,极有可能在T头筛这段时间内列车最小车头越过计轴点,或者列车车轴刷过计轴点而占用下一计轴区段,从而导致头筛失败。因此,很有必要对动态头筛的成功率进行分析及研究,以便在初期进行优化设计或对运营提出操作建议。而影响动态头筛成功率的最大因素就是列车头筛时的速度,为便于公式描述,将其定义为V头筛,其确切的含义为在动态头筛过程中列车的平均速度。本文研究的动态头筛效率就是在保证头筛成功的前提下尽可能地提高V头筛。
动态头筛开始的临界状态为列车最小车头位置与计轴区段边界(即计轴点)的距离恰好为D头筛。
列车以速度V头筛走行T头筛后,应仍然满足条件①,即列车最小车头位置未越过计轴点。

变式可得:

列车从头筛开始的临界位置到第一根车轴刚好刷过计轴点的用时T刷轴为:

式中:D车钩_第一车轴为列车的车钩前端部与第一根车轴的距离,是固有的车辆长度参数;D误差为头筛开始时CC计算的列车定位误差,即CC根据列车定位报告计算得出的列车最小车头位置和列车实际位置的差值。
从列车第一根车轴刚好刷过计轴点到ZC 判定该计轴区段已占用的实际用时TZC判定占用,受单次头筛时计轴系统判断占用延时、继电器接点落下延时、通信传输时间等随机时间的影响。只要T头筛<T刷轴+TZC判定占用,那 么 就 能 保 证 在 头 筛 判 定 延 时T头筛结束的瞬间,列车前行位移不会对条件②的成立产生干扰,从而实现ZC 头筛成功。

变式可得:

综合式(2) 和式(5) 可知,为保证成功动态头筛,列车头筛速度V头筛应满足:

式(6) 右边部分,除D误差、TZC判定占用为变量外,其余均为系统常量。
基于数学理论分析以及多个实际项目的经验分析可知,由于D头筛在不同项目中取值差异较大,而变量D误差是根据列车运行车况、地点等因素不断变化的,故D头筛、D误差对V头筛起决定性作用。其余参量由于其在不同项目中取值差异极小,故不做这些参量对V头筛计算结果的影响分析。
基于项目典型值,表1 列出了在不同D头筛、D误差取值下保证成功头筛的V头筛范围。
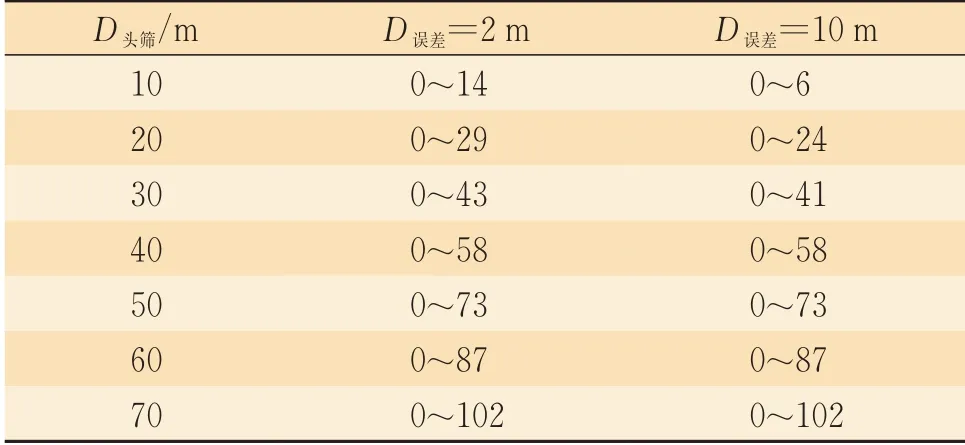
表1 不同D 头筛、D 误差取值下的V 头筛范围 km/h
由表1可知,D头筛越大而D误差越小,则成功头筛的最大V头筛越高。反之,例如当D头筛为10 m 且D误差为10 m 时,成功头筛的最大V头筛不得超过6 km/h。这一极低的速度限制约束了司机驾驶列车的灵活性,对司机娴熟操纵牵引制动手柄、控制车速的要求很高,一旦超速就会导致头筛失败。同时,为满足以低于6 km/h 的速度开始头筛作业,列车需要提前降速,这也在一定程度上影响了运营效率。
5 提高动态头筛效率的措施
通过上文综合分析及研究可知,提高成功头筛的最大V头筛就能提高动态头筛的效率。最有效的办法就是增大D头筛或减小D误差。
增大D头筛就是增加上线工程车的最小长度。考虑到线路配备的各种用途的工程车,种类较多、且车长较短,比较切实可行的措施是输出运营限制条件:若正线存在电客车,那么在此期间上线的工程车车长不得低于某个长度或者要求工程车必须连挂上线且总车长不得低于某个长度。根据经验值,这个长度取值30 m 较为合理。
减小D误差就是在列车开始头筛前减少CC 计算的列车定位误差,可以在系统设计阶段布设定位信标,列车通过读取信标内的精确定位值,从而消除自身定位误差。
6 结束语
本文提出的提高动态头筛效率的2 个措施以最终高效运营为结果导向,通过多个项目的实践证明是切实可行的。但需要在信号系统项目的详细设计阶段,考虑项目实际参数,以实现精细化设计,并在项目交付时进行详细说明。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
铁路计算机应用(2022年5期)2022-06-08
华东交通大学学报(2022年1期)2022-04-06
云南画报(2021年11期)2022-01-18
文萃报·周五版(2021年11期)2021-06-23
铁路通信信号工程技术(2021年5期)2021-05-27
科技视界(2020年8期)2020-05-18
军事文摘(2020年24期)2020-02-06
山东工业技术(2019年2期)2019-02-09
创新作文(1-2年级)(2017年11期)2018-04-17