基于工业互联网的5G TSN研究*
2021-05-08 06:10:24樊陆陆
通信技术 2021年4期
樊陆陆,郭 刚
[重庆市工业互联网发展研究中心(中国工业互联网研究院重庆分院),重庆 400707]
0 引言
工业互联网技术是5G、大数据、云计算以及人工智能等新一代信息通信技术和工业网络、工业控制系统等工业技术的融合,是第4次工业革命的基石[1]。时间敏感网络(Time Sensitive Networking,TSN)是目前国际产业界比较看好的全新的工业通信技术,能满足工业互联时低时延、高可靠和确定性的要求。而5G+TSN是未来实现工业互联网无线化和柔性制造的重要基础[2]。
1 5G标准演进情况
2017年12月,3GPP发布了R15非独立组网(Non-Standalone,NSA)标准。2018年6月,3GPP发布了第一个5G独立组网(Standalone,SA)标准,标志着3GPP已经完成5G第一阶段全功能标准化制定工作,进入产业全面冲刺的新时代。2020年7月,3GPP宣布R16版本标准冻结,标志5G第一个演进版本标准完成。3GPP R16标准相比R15有了很大的变化,主要体现在“新能力拓展”“已有能力挖潜”和“运维降本增效”等方面。R16标准应用于更好的服务行业,在提高5G效率方面做了增强,特别是面向工业互联网、车联网以及其他行业应用实现了从“能用”到“好用”的飞跃[3]。
2 5G TSN技术性能评估准则
5G标准3GPP TS 22.104[4]中规范了5G对垂直领域自动化行业的通信业务需求以及物理控制应用业务需求的研究。5G系统应支持与时俱进的网络配置的完全分布式模型。该模型与多流注册协议(Multiple Stream Registration Protocol,MSRP)[5]、IEEE P802.1CS链路本地注册协议(Link-local Registraion Protocol,LRP)[6]和IEEE P802.1Qdd资源分配协议(Resource Allocation Protocol,RAP)[7]能够对齐。另外,5G系统还应支持用户-网络接口或网络-网络接口配置,确保能动态配置时间敏感网络的完全分布式模型。
5G标准3GPP 38.825 V16.0.0[8]中规范了TSN性能评估要求。表1给出了3GPP RAN工作组评估TSN性能的基准。该TSN性能评估基准能满足更高的层冗余,可以实现超过99.999 9%的可靠性目标,且不需要考虑PHY层数据传输情况。
3 5G TSN技术
工业互联网行业正在进入快速发展期,而5G无疑将助力工业互联网的发展。3GPP R16标准中新增时间敏感通信技术,目的是扩大潜在的工业互联网用例,实现5G和TSC的互通。TSC将5G系统作为一个TSN网桥集成在TSN系统,利用高精度时间同步、TSN管理协同及网络拓扑发现等能力,在固网覆盖困难或存在移动性要求的业务场景辅助TSN网络,提供确定性网络传输服务[2]。
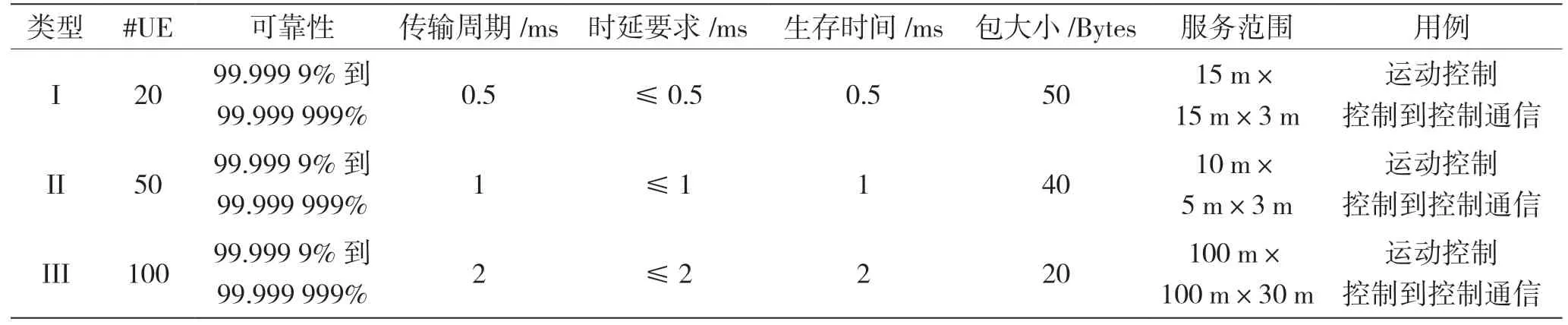
表1 TSN需求评估考虑的用例和需求
3.1 5G TSN时间同步
时间同步是确定性通信的前提。5G网络和工业互联网络有各自的时钟同步机制[2],而实现两者的时间同步是面向工业应用场景的关键能力之一。为了支持TSN时间同步,5GS与外部网络(如工业互联网)集成TSN桥。该TSN桥符合工业以太网的TSN采用的广义精准时钟协议IEEE Std 802.1AS[9]的要求。对于TSN时间同步,5G网络中的各网元设备如用户设备(User Equipment,UE)、5G基站(generation Node Base,gNB)、用户平面功能(User Plane Function,UPF)、网络侧TSN转换器(Network-side TSN translator,NW-TT)和设备侧TSN转换器(Device-side TSN translator,DS-TT)等与5G内部系统时钟同步,可以将整个端到端5G系统视为时间感知系统。整个系统中,只有5G系统边缘的TSN转换器才需要支持IEEE Std 802.1AS协议,执行与IEEE 802.1AS相关的某些功能,如广义精准时钟协议gPTP、时间戳记以及rateRatio等。
5G TSN和工业互联网的时钟分配模型如图1所示。该模型主要包括5GS同步和TSN域同步两个同步系统,其中5GS同步主要实现5G接入网的同步,TSN域同步主要为TSN网络提供同步服务。另外,当TSN主时钟(TSN GM)位于TSN工作域时,要考虑主端口(M)和从端口(S)的情况。标准3GPP TS 23.501 V16.7.0[10]中规范了该版本5GS仅适用于确定精准时钟协议(Precise Time Protocol,PTP)实例和时间同步生成树。
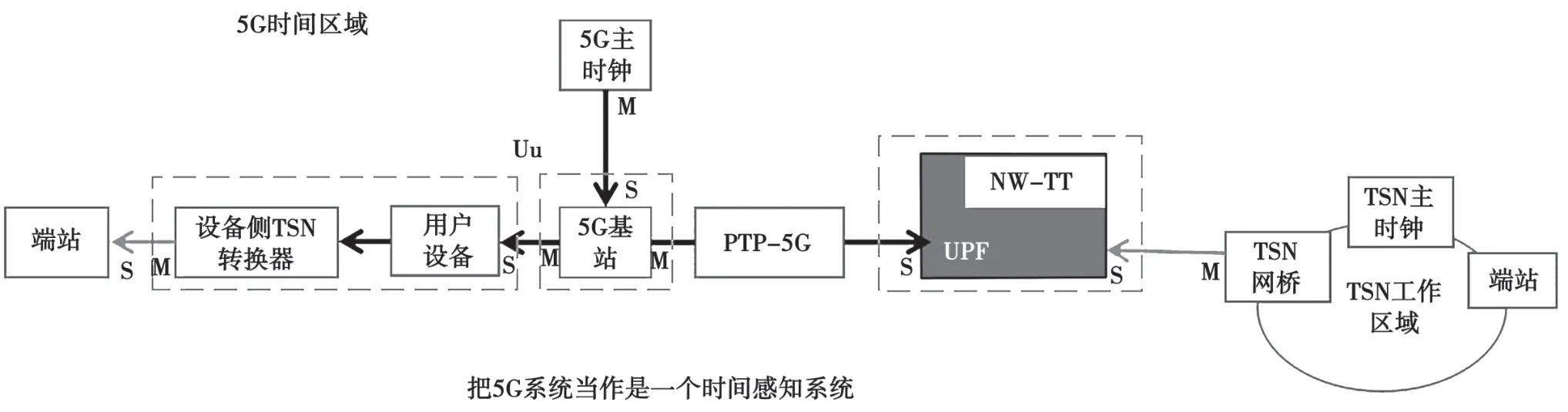
图1 5G TSN和工业互联网的时钟分配模型
5GS网桥PTP端口状态在DS-TT和NW-TT中本地配置时,按照如下规则配置:对于DS-TT端口,所有gPTP域的PTP端口状态均为MasterPort;当TSN主时钟(TSN GM)在5GS外部时,对于每个gPTP域的一个NW-TT端口,PTP端口状态为SlavePort,对于同一gPTP域的所有其他NW-TT端口,PTP端口状态为PassivePort或MasterPort。将5GS配置为所连接网络的gPTP域的主服务器(5G GM)时,所有NW-TT端口均处于该gPTP域的MasterPort状态。
3.2 5GS TSN桥管理
对于TSN网络,5GS功能充当一个或多个TSN桥的角色。5GS网桥由单个UPF侧的端口、UE和UPF之间的用户平面隧道和DS-TT侧的端口组成。对于TSN网络的每个5GS网桥,NW-TT上的端口都支持与TSN网络的连接,同时DS-TT侧上的端口与PDU会话相关联,从而提供与TSN网络的连接。
5GS TSN桥的粒度是每个网络实例的每个UPF,如图2所示。5GS TSN网桥的网桥ID和UPF的UPF ID绑定在一起。5GS在报告5GS TSN网桥信息期间,TSN应用功能实体(TSN AF)存储UE/DS-TT侧的端口与PDU会话之间的绑定关系。与此同时,TSN AF还存储有关UPF/NW-TT一侧的端口信息。UPF/NW-TT根据流量转发信息将流量转发到适当的出口端口。从TSN AF的角度来看,5GS TSN桥在UPF中具有单个NW-TT实体,且NW-TT可能具有用于流量转发的多个端口。
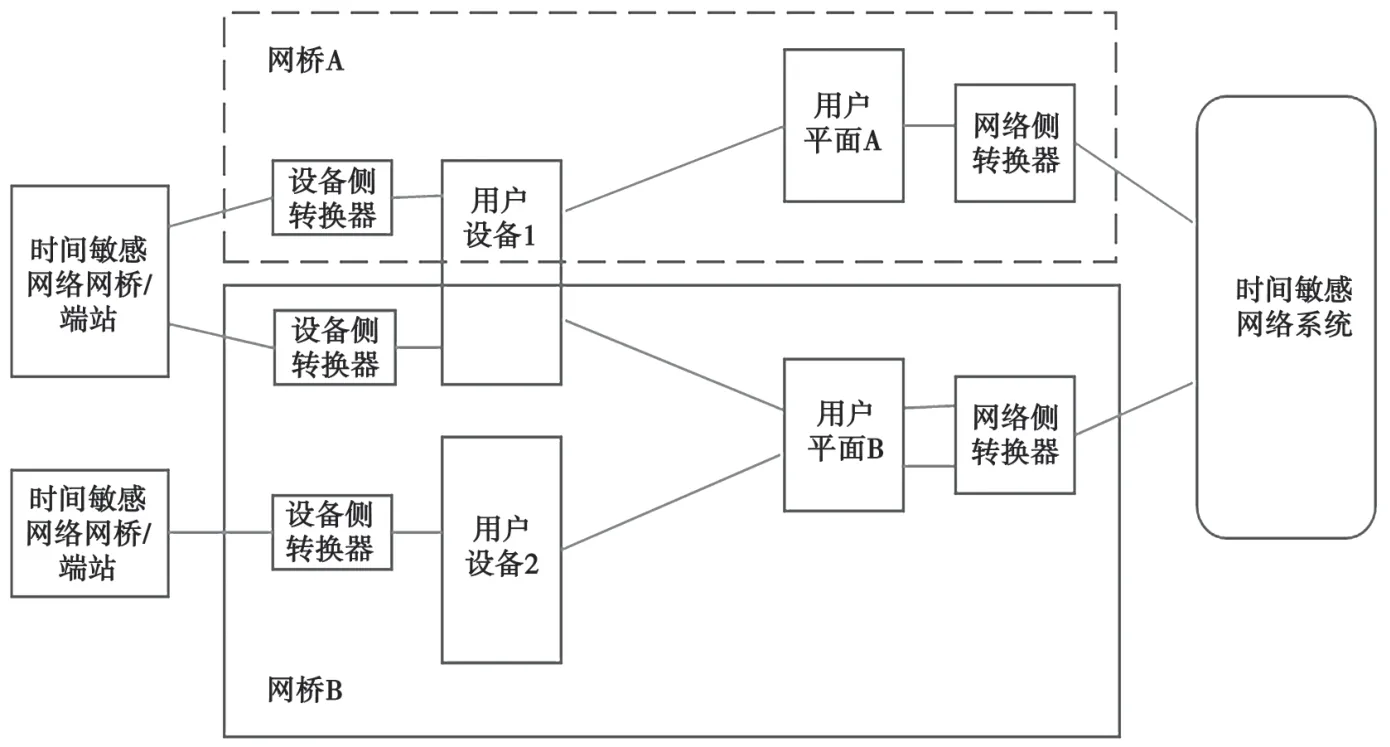
图2 基于UPF的5GS网桥
对于给定的UPF,每个DS-TT端口只有一个PDU会话。通过特定的UPF连接到同一TSN网络的所有PDU会话都被分组为一个5GS桥接器。UE/DS-TT侧和UPF/NW-TT侧的每个端口的功能已集成为5GS桥接器配置的一部分,并通知给TSN AF,交付给CNC以进行TSN桥接器注册和修改。
为了在5GS桥接器上支持TSN调度的流量,5G标准中规范5GS应支持包括在5GS中配置网桥信息、在PDU会话建立后将5GS网桥的网桥信息报告给TSN网络等功能。TSN网络使用5GS桥的桥信息来为5GS桥进行适当的管理配置。5GS Bridge的网桥信息至少包括网桥ID、港口数量以及端口号列表等信息。
4 5G TSN典型应用场景
3GPP R16中定义了运动控制、有线到无线连接替换、智能搬运、移动机器人以及控制到控制通信等5种典型的应用场景[4],可以极大地丰富工业互联网应用场景。
4.1 运动控制
运动控制系统负责以明确定义的方式控制机器或旋转部件的运动,可应用在印刷机、机床或包装机中。运动控制系统的示意图,如图3所示。运动控制器(Motion Controller)周期性地将设置的自动化程序发送给一个或多个线性驱动器(Actuator),以期在随后的一个或者多个过程中自动化地执行相应的动作,如驱动某个组件的运动或者旋转等。同时,传感器(Sensor)评估设备当前的状态,并将评估结果反馈给运动控制器。该过程严格执行闭环循环,以便在一个应用周期内,运动控制器能将新的应用程序发送给所有执行器,且所有传感器将其实际值发送回运动控制器。
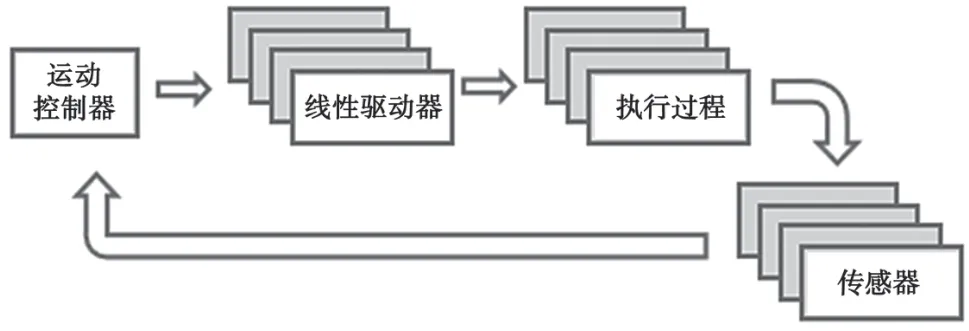
图3 运动控制系统
4.2 有线到无线连接替换
在传统工厂中,生产环境是固定的,通常使用工业以太网技术通过电缆连接相互协作的机器或者设备。在将来的工业互联网场景中,为了增加生产设备的灵活性,可用无线连接替代现有的有线连接。假设有4台机器在生产过程中相互配合,为了方便更换电缆,每台机器都配备了一个与控制器连接的5G UE(如图4所示),利用5G网络实现PLC之间、PLC与厂内系统间的系统数据传输,减少工厂内有线连接,快速实现产线产能匹配。
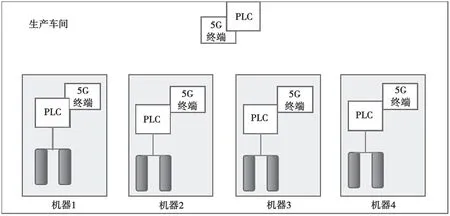
图4 具有无线连接的4台协作机器的示例
4.3 智能搬运
在未来的智能工厂中,大型或重型工件将由多个移动机器人/自动引导车搬运到另一个地方。这些移动机器人/自动引导车需要协同工作才能安全地搬运大型或重型工件。这种合作是通过网络物理控制应用程序实现的,以协调的方式控制移动机器人/自动引导车的驱动和移动,从而将大型或重型工件从一个地方平稳安全地运送到另一个地方(如图5所示)。协作移动机器人/自动引导车之间的通信需要高通信服务可用性和超低延迟。控制命令和控制反馈的交换是通过周期性、确定性通信并使用时间敏感型网络完成的。
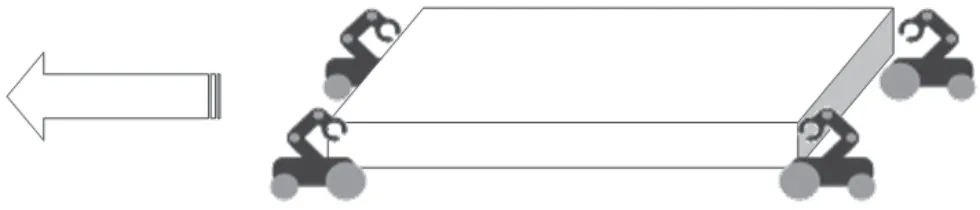
图5 协作搬运大型工件的移动机器人/自动引导车
4.4 移动机器人
移动机器人在工业和内部物流环境中具有大量应用,并将在未来工厂中发挥越来越重要的作用。移动机器人实质上是一种可编程机器,能够按照编程路径执行多种操作来完成各种任务。这意味着移动机器人可以执行诸如在工作步骤中的协助以及货物、材料和其他物体的运输之类的活动。移动机器人系统的特点是相对于环境具有最大的灵活性,具有一定程度的自主权和感知能力,即它们可以感知和响应环境。移动机器人最常见的应用是工厂中的自动导引车。
5 结语
目前,在5G R16第一版本标准中已经规范了与工业互联网相关的技术如5G TSN、业务需求等内容,在后续R16标准中将进一步研究与工业互联网相关的接入组网业务需求、网络架构和功能、空口技术增强等内容[11-13]。5G TSN是实现工业互联网的关键技术,能满足工业互联网低时延、低抖动的通信要求,助力工业互联网的发展。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
科学家(2021年24期)2021-04-25 13:25:34
中国交通信息化(2018年8期)2018-11-09 01:05:44
网络安全和信息化(2017年6期)2017-11-23 08:36:18
网络安全和信息化(2017年9期)2017-11-07 06:30:50
制造技术与机床(2017年3期)2017-06-23 08:11:21
网络安全和信息化(2015年5期)2015-12-03 02:18:24
电脑迷(2015年6期)2015-05-30 08:52:42
职业·中旬(2015年4期)2015-05-30 05:54:49
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31