
高可靠低时延丝袜机电磁阀组驱动控制技术
2021-05-07 17:33牛冲彭来湖吕永法史伟民戴宁
现代纺织技术 2021年1期
关键词:电磁阀
牛冲 彭来湖 吕永法 史伟民 戴宁

摘要:针对现有丝袜机电磁阀驱动电路路数多、布线复杂、相互干扰、可靠性差、系统不稳定等问题,开展高可靠低时延电磁阀组驱动控制技术研究,提出一种菊花链式全双工串行总线传输结构的丝袜机电磁阀组驱动控制方案。该方案以差分串行信号形式与多个集成驱动电路模块进行数据传输,通过硬件功能化配置的方法,使电磁阀工作在高压开启、PWM保持状态,进行驱动模块故障自保护、自诊断功能设计,有效减少了电气接线,减少了互扰,提高了系统稳定性和智能化水平。利用示波器对传输信号波形进行观察,并在不同的参数下对电磁阀进行工作测试。结果表明:该方案下数据传输速度快、抗干扰能力强,满足丝袜机高速动作要求;在高压开启时间300ms,PWM占空比62.5%,频率50kHz条件下,电磁阀能够有效执行动作且功耗较低,同时该方案能够及时检测到多种故障并处理,提高了工作可靠性,证明了该技术方案的可行性和有效性。
关键词:电磁阀;菊花链式;高可靠;低时延
中图分类号:TS103.7
文献标志码:A
文章编号:1009-265X(2021)01-0097-06
作者简介:牛冲(1991-),男,河南新乡人,硕士研究生,主要从事针织装备控制技术方面的研究。
Abstract:Inconsiderationoftheproblemsofsolenoidvalveofexistingstockingmachinessuchaslargenumberofdrivingcircuits,complicatedwiring,mutualinterference,poorreliability,andunstablesystem,astudyondrivecontroltechnologyofhigh-reliabilityshort-latencysolenoidvalvegroupisconducted,andadrivecontrolsolutionofsolenoidvalvegroupofstockingmachinesindaisy-chainedfullduplexserialbustransmissionstructureisproposed.Accordingtothesolution,datatransmissionwithmultipleintegrateddrivecircuitmodulesisrealizedbymeansofdifferentialserialsignals.Besides,drivermoduleself-protectionandself-diagnosisfunctiondesignisrealizedbymakingsolenoidvalvesworkunderhighvoltagewithPWMretainingviafunctionalconfigurationofhardware,whichlargelyreduceselectricalwiringandmutualinterference,andimprovessystemstabilityandintelligencelevel.Thetransmittedsignalwaveformisobservedwithoscilloscope,andthesolenoidvalvesunderdifferentoperatingparametersweretested.Theresultsshowthatthesolutioncanrealizehighdatatransmissionspeedandlowmutualinterference,whichmeetsthehigh-speedoperationrequirementsofstockingmachine.Undertheconditionsofhigh-voltageretainingfor300ms,PWMdutyratioof62.5%andfrequencyof50kHz,thesolenoidvalvecaneffectivelyperformtheactionwithlowpowerdissipation.Meanwhile,thesolutionishelpfultodetectmultiplefaultsandprocessthemintime,improvingoperationalreliability,andprovingthefeasibilityandeffectivenessofthetechnicalsolution.
Keywords:solenoidvalve;daisy-chained;high-reliability;short-latency
在提花丝袜机中,三角、剪刀、梭子等执行机构都是由电磁阀进行控制,路数众多,因此电磁阀的驱动控制对整个丝袜机控制系统设计具有重要的作用[1]。丝袜机转速快、机构动作频率高,同时由于运转过程中伺服电机、步进电机等执行器会产生大量电磁干扰,因此对于电磁阀驱动控制的可靠性、通讯速度及抗干扰能力有较高的要求。现有电磁阀驱动控制方案大致可分为两类:一类是采用复杂可编程逻辑器件扩展输出的控制方式,对电磁阀进行单点控制;另一类是以微控制器为核心的总线控制方式。前者导致系统线材繁多,控制线路复杂,故障概率高并且容易引入干扰。后者通讯速度有瓶颈,可扩展性较差,每扩展一个节点就需要增加一块微控制器,成本较高,并且如果节点过多将会造成较大的通讯传输时延。另外现有的控制方案均缺乏对电磁阀的故障检测及保护功能,可靠性较差[2-7]。
本文通过研究SPI总线的传输特性、结构,根据提花丝袜机编织工艺的控制要求,提出了一种高可靠低时延的电磁阀驱动控制技术。该技术采用ARM控制器為控制核心,以集成驱动器直接驱动电磁阀。使用单一串口以菊花链的方式级联多个驱动器,采用双端平衡的差分总线传输控制数据,提高了系统的抗干扰能力和可扩展性。通过串口配置驱动器使电磁阀工作在高压开启、PWM保持的状态以降低工作温度、节约功耗。控制器实时读取驱动器故障寄存器监测电磁阀工作状况,提高工作可靠性。
1驱动控制整体方案设计
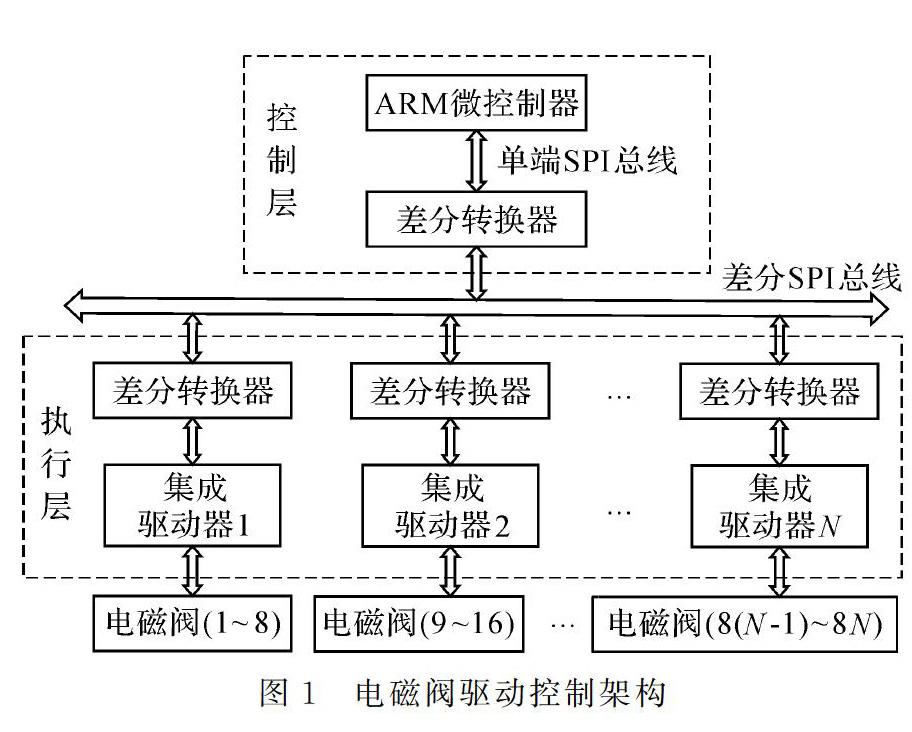
根据分布位置,提花丝袜机电磁阀大致分为两类:梭子电磁阀和其他电磁阀。梭子电磁阀位于梭子机构后面,每路16个。其他电磁阀分布于机器后面两侧,成组排列,一侧各8排,每排8个电磁阀。由于提花丝袜机机型种类较多,电磁阀用量不尽相同,控制方案需要能够方便地进行电磁阀组的扩展以匹配不同机型的需求。
设计电磁阀驱动控制架构如图1所示,分为控制层和执行层,控制层以高性能ARM微控制器为核心,负责链条电磁阀动作指令的解析以及控制数据的整合与发送。执行层为具有SPI串行接口的专用集成驱动器,用于直接驱动电磁阀。控制器与驱动器之间以高速双向全双工串行SPI总线进行通讯,利用差分转换器将单端SPI控制信号转换为差分信号在总线上进行数据传输。
2驱动模块硬件设计
2.1低时延总线传输结构及抗干扰差分电路设计
SPI总线是一种同步串行外设接口协议,它可以使MCU与各种外围设备以串行的方式进行通信以交换信息。SPI总线通信协议简单,具有传输速度快、通信效率高等诸多优点,但是由于SPI总线采用的是单端不平衡传输的数据传输方式,其传输距离较近,通常仅局限于板、卡级别的短距离数据传输。对于一主多从式通讯,SPI总线通常以片选信号来实现从设备的选择,这样将会占用过多的主设备控制端口,造成控制线增多,不便于扩展等问题,同时可靠性也会变差。本技术方案以低时延菊花链式总线传输结构及抗干扰差分电路设计规避以上问题,实现电磁阀的快速可靠控制。
2.1.1低时延菊链式全双工串行总线传输结构
丝袜机运转速度快、执行机构动作频率高,对电磁阀的动作响应速度提出很高的要求,通讯实时性是机器运转过程中电磁阀动作执行是否准确有效的必然要求。传统电磁阀驱动控制方案多采用CAN总线通讯方式,根据CAN总线的位填充机制,按最高1Mbps的波特率计算,单个扩展帧的传输延迟时间约为128~151μs。而SPI总线是一种高速的全双工同步通信总线,通讯波特率高达10Mbps以上。为满足丝袜机控制需求,在10Mbps波特率下传输一帧12个控制字数据的传输延迟时间约为10μs。因此采用SPI总线能够有效减少传播时延。另外SPI总线通讯协议简单,报文数据长度小,通讯双方的发送时延与处理时延也非常小。
采用菊花链式拓扑结构能够实现以最少的信号线控制多个从设备,并且理论上可以无限扩展,因此菊花链式SPI总线传输结构非常适合应用于对通讯速率、可扩展性要求高的场合,其传输结构如图2所示。菊花链式结构采用一个CS信号控制所有驱动器的CS输入,所有驱动器接收同一个CLK时钟信号。只有链上的第一个驱动器从微控制器直接接收命令,其他所有驱动器都从前一个驱动器的DOUT输出获得其DIN数据。
电磁阀控制的动作在丝袜机运转过程中按角度来执行,在针筒转速RMC(r/min)条件下,可得运转过程中的理论最小时间间隔T:
T=60×106RMC×360°(1)
由于机器特性与编织工艺的要求,丝袜机在包含电磁阀动作的步骤中针筒转速在200r/min以下,按最快速度200r/min可计算出电磁阀动作执行理论最小时间间隔约为900μs。
SPI总线在传输波特率B条件下,实现对总共n块电磁阀驱动器的数据传输所需要的总时间TAll:
TAll=106B×8×n(2)
提花丝袜机实际电磁阀组数量为12组,即需要12块驱动器,则n取12,SPI总线传输波特率取最高波特率10Mbps,該条件下可计算得出SPI传输数据总时间约为10μs。
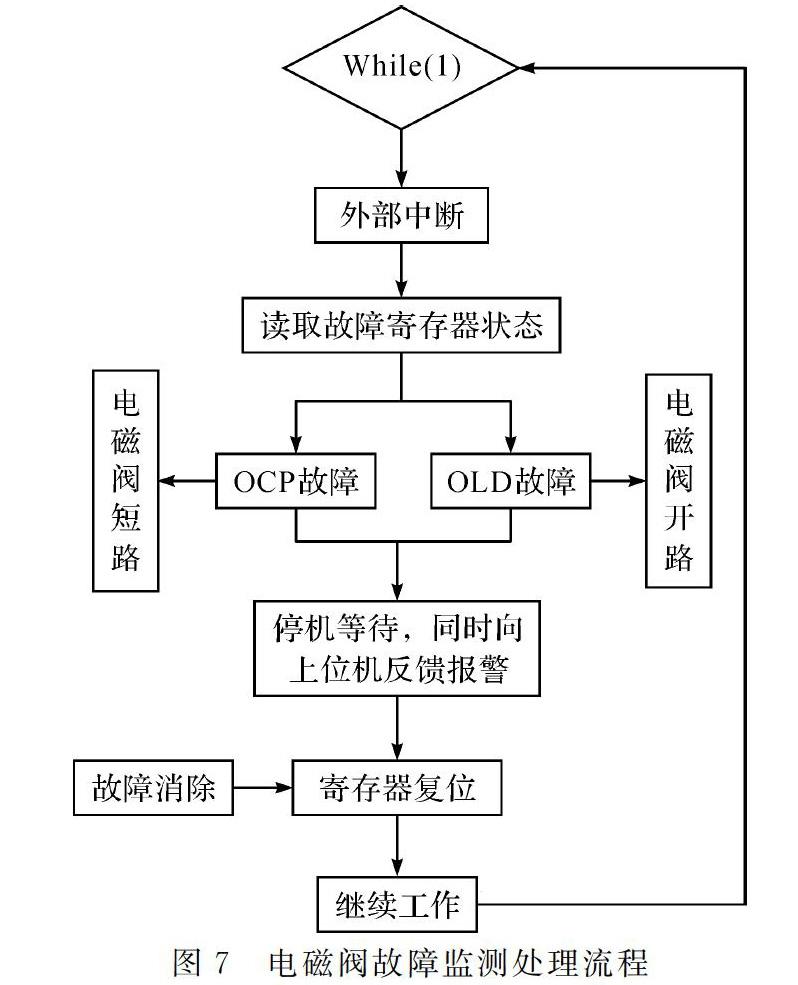
显然TAll 2.1.2抗干扰差分电路设计实现 差分方式传输指发送端在两条信号线上传输的是幅值相等、相位相反的电信号,接收端对两条信号做减法运算来判断逻辑状态“0”还是“1”,这种逻辑判断方式可以有效消除外部共模干扰的影响。丝袜机高速运转过程中,执行部件伺服电机、步进电机等会产生大量的电磁干扰。并且丝袜机上电磁阀分布较为分散,驱动电路模块间传输距离不止板卡级别的短距离。如果使用TTL信号远距离传输,容易受到电磁干扰的影响导致SPI数据传输出错。将SPI数据总线由单端不平衡传输方式转换为双端平衡传输方式,可以极大地抑制外部电磁干扰,提高数据传输的距离,实现SPI数据远距离稳定传输[8-9]。因此设计采用差分转换器对TTL电平进行转换,SPI总线的电平转换电路如图3所示。 控制端采用差分驱动器将LATCH、CLK、SDI等TTL电平转换为差分信号进行传输,同时利用差分接收器将SDO差分信号转换为单片机可处理的TTL电平信号。这样就保证在总线上的传输均是双端平衡的差分信号,提高了信号传输过程中的抗干扰能力,保证了数据传输的准确性。差分转换器转换频率高达25MHz,能够满足高速SPI总线的差动转换需求。 2.2高可靠驱动电路设计 可靠性是指元件、产品或系统在一定时间内、在一定条件下无故障执行指定功能的能力或可能性。本研究所述电磁阀驱动控制技术采用了高集成度模块化的驱动电路、低功耗工作方式以及完整的故障自检测自保护设计,从而大大提高了丝袜机控制系统电磁阀控制模块的可靠性。 2.2.1高集成度模块化驱动电路设计 传统的以开关管单点驱动控制电磁阀,势必造成控制支路偏多,控制线缆数增多,出现故障的概率就会增加,同时这种驱动电路难以实现有效的故障检测以保护整个驱动电路模块。驱动电路模块采用集成驱动器,并进行过流保护和开路、短路负载检测功能设计。内置二极管用来钳制由电感负载生成的关闭瞬态反向电动势,完备的故障检测机制及保护功能使该驱动电路具有很高的可靠性。同时其具备SPI串行接口支持菊花链连接,可通过串口配置内部寄存器使输出处于PWM脉冲输出模式,能够设计用来降低电磁阀功耗,延长电磁阀工作寿命。驱动模块功能框图如图4所示。 该集成驱动器工作电压范围8~38V,内置LDO(低压差线性稳压器)对输入电压降压处理并提供给内部逻辑单元工作。核心逻辑单元包含控制寄存器、数据寄存器和故障寄存器,可与SPI串行接口锁存器进行数据交互。逻辑单元控制8个NMOS场效应管的开关并诊断当前工作状况,故障发生触发保护单元关断输出并使能报警引脚。 2.2.2低功耗工作模式实现 丝袜机上采用的电磁阀工作规格为24V/1.3W(梭子组)、24V/0.3W(功能气阀组)和24V/2.5W(EV三角)3种,则电磁阀的额定工作电流小于20mA。集成驱动器可提供最高200mA(8通道打开)的连续输出电流,且电流驱动能力随着PWM占空比的降低而增加,因此该驱动器完全能够满足电磁阀驱动的要求。 由电磁阀的工作原理可知,在电感、线圈匝数确定的情况下,电磁阀吸力大小主要由电磁阀线圈的电流大小决定。较大的电流能够使电磁阀迅速动作,在电磁力克服弹簧复位拉力之后,只需要较小的电流即可维持其始终吸合的状态。所以为了降低线圈工作温度及功耗,采用高压开启、PWM保持的方式使得电磁阀电流在整个动作过程中维持一个理想的工作曲线,在该模式下电磁阀工作过程驱动电压、线圈电流波形图如图5所示。 驱动器提供多组不同高压开启时间和PWM保持占空比参数,通过配置控制寄存器值可选择不同的工作参数。控制寄存器格式如表1所示。 通过实验测试选取合适的高压开启时间、PWM频率及占空比,使电磁阀工作在理想的电流条件下,可有效降低功耗,保护电磁阀,提高系统可靠性。 2.2.3故障自检测自保护设计 驱动模块电路利用MOS管的开关作用实现对电磁阀线圈充电的通断控制,MOS管具有较脆弱的承受短时过载能力,合理设计保护电路可提高器件的可靠性。本设计驱动电路具有过流保护、开路负载检测、欠压闭锁和过热关断等保护和诊断特性,提供独立通道状态报告以及故障情况警报。同时具备一个开漏输出型故障指示引脚,当驱动器发生故障时该引脚被拉低。 本设计中驱动器输出回路使用电流采样保护电路,当输出电流超过额定阈值,通过保护电路关闭驱动电路,同时置位故障寄存器相应标志位。当任何输出处于关闭状态,内部电流吸收器在输出节点下拉约30μA的电流,如果检测到引脚上的电压小于1.2V,则报告开路负载情况同时置位相应通道故障寄存器标志位。当驱动器供电输入电压下降到欠压锁定阈值电压以下,模块所有电路将被禁用。如果芯片温度超过安全极限,所有输出将被关闭。 本设计将其引入到控制器外部中断管脚,并配置为下降沿触发模式,可以迅速监测到故障的发生并及时处理。驱动器提供一个故障寄存器来表征当前各通道的故障状态,故障状态包括过流故障(OCP)和开路故障(OLD),保存在该16位的寄存器。故障寄存器每一位代表一个通道的故障状态,故障发生置位相应标志位。通过串口实时读取驱动器内部故障寄存器的内容,根据寄存器内容判断故障通道及故障类型以实现及时报警停机,从而有效避免因漏动作引起的不良品或机器損坏。 3电磁阀控制软件开发 3.1菊链式多节点驱动程序设计 本设计采用PWM保持的方式进行电磁阀驱动,控制层在启动后将首先配置各驱动模块的控制寄存器以选取合适的高压开启时间及占空比。电磁阀动作在丝袜机工艺程序中按角度动作,控制层在主循环中采用扫描的方式实时读取电磁阀动作指令,并解析整合动作指令为驱动器的控制字数据。控制层将首先判断该控制字数据与驱动器工作状态是否相同,相同则不予传输并继续等待命令,不同则传输当前控制字数据。同时控制层对回读的数据进行校验,判断当前控制字数据是否传输正确。不同则判定传输失败并再次传输当前控制字,相同则确定传输成功再次进入指令等待状态。SPI总线为MSB的传输方式,传输控制字首字节为总线上最后一块从设备的动作数据,尾字节为第一块从设备的动作数据。控制流程如图6所示。 3.2电磁阀故障监测处理程序 电磁阀短路(过流)或电磁阀漏接(开路)均会置位故障寄存器中相应的故障标志位。控制层主程序中捕获到外部故障中断后,读取故障寄存器状态值,判断相应的故障状态并立即停车,同时向上位机反馈当前的故障通道及故障类型,从而有效的避免漏动作或误动作。当故障消除后,可以通过特殊命令故障复位来清除所有的异常状态,恢复正常工作。电磁阀故障监测处理程序流程如图7所示。 4测试分析 4.1气阀动作测试 本设计通过串口配置驱动器使电磁阀工作在高压开启、PWM保持的状态。过短的高压开启时间可能导致线圈无法动作到位,合适的PWM频率能够有效减小线圈上的电流波动和电磁干扰,PWM的占空比决定了保持电流的大小。因此需要选取合适的工作参数使电磁阀工作在相对理想的状态。 为选取合适的高压开启时间、PWM频率和占空比,本设计针对不同的参数值测试线圈电流及工作温度,通过实际测试规格为24VDC/2.5W的电磁阀得到表2中的具体工作数据,表2中工作电流和温度均为多次采样后取得的平均值。 由表2可知,在条件5下(高压开启时间300ms,PWM占空比62.5%,频率50kHz),电磁阀能够有效地驱动机构执行动作,并且此时电磁阀具有较低的功耗。 4.2数据传输测试 实验搭建平台如图8(a)所示,使用示波器对SPI总线信号进行观察。实验使用安捷伦MSO-X2002A混合信号示波器,采样率2GSa/s。通过示波器采集SPI总线控制信号LATCH、CLK,在总线末端测得控制信号传输的波形如图8(b)所示。SPI传输时序为片选信号LATCH拉低时开始数据传输,结束后拉高,1个CLK下降沿传输1位数据。图8(b)可观察到,每1位的时间间隔约为3.3μs,一个字节数据传输总时间约为28μs,可计算出传输比特率约为300kbps。在图8中可以看到。在长达2m的信号传输线上测得的差分信号波形稳定,满足长距离传输的要求。 5结语 研究设计了高可靠低时延丝袜机电磁阀组驱动控制技术,使用高速SPI总线菊花链式结构连接主从设备,总线上以差分信号进行传输,解决了传统控制方案通讯速度速度低、距离短、响应慢以及抗干扰性差的问题。利用专用集成驱动器提高了驱动电路的可靠性,配置PWM工作模式及故障自检能力使电磁阀能够安全稳定的以低功耗状态工作。经实践检验,该方案稳定可靠、实时性强,具有较高的工程应用价值。 参考文献: [1]高术森,张团善,乔辉,等.基于STM32的提花丝袜机电磁阀控制系统设计[J].西安工程大学学报,2017,31(5):646-651. [2]彭来湖,万中魁,胡旭东,等.无缝内衣机分布式气阀组驱动控制单元设计[J].纺织学报,2016,37(10):125-129. [3]彭来湖,杨敏,史伟民,等.双总线架构圆纬机编织机构控制单元设计[J].机电工程,2012(6):668-673. [4]叶宏,向忠,胡旭东.气动先导式高压电磁阀的动态特性仿真研究[J].浙江理工大学学报,2017,37(1):85-91. [5]项宏年.高速丝袜机控制系统的研制[D].杭州:浙江理工大学,2018. [6]叶洪伟,王涛,金鑫.高速电磁阀驱动控制策略的研究[J].电工电气,2011(7):18-20. [7]郭张军,吴震宇,刘凤臣.基于ARM7的喷气织机电磁阀控制电路[J].机电工程,2012,29(7):773-776. [8]梁德坚,刘玉琼.SPI总线数据远距离传输实现[J].电子测试,2009(1):72-75. [9]邹丽丽,章世华,董湘麟.高速串行差分信号的PCB设计与仿真[J].中国新技术新产品,2008(16):23-24.
猜你喜欢
科技信息·学术版(2021年13期)2021-10-09
健康之友(2020年1期)2020-03-24
科学导报·科学工程与电力(2019年7期)2019-09-10
E动时尚·科学工程技术(2019年6期)2019-09-10
汽车与驾驶维修(维修版)(2019年6期)2019-09-10
科技视界(2017年12期)2017-09-11
印刷技术·数字印艺(2017年1期)2017-03-01
科技资讯(2016年6期)2016-05-14
科技资讯(2016年9期)2016-05-14
中国高新技术企业(2015年17期)2015-05-18
