基于WRLS-YOLOv4的大型工程机械检测
2021-05-07 02:24余长生秦伦明王悉陈鹏
现代信息科技 2021年23期
余长生 秦伦明 王悉 陈鹏

摘 要:为解决大型工程机械不规范施工导致输电线路出现故障的问题,提出一种改进YOLOv4的大型工程机械设备检测方法。当前YOLOv4算法存在识别准确率低、漏检率高的缺点,文章借鉴热重启机制思想,设置学习率按余弦函数周期性衰减来减小loss值,提高识别准确率。引入标签平滑对正负样本的标签值进行微调整,避免网络过拟合,降低漏检率。实验结果表明,改进后的WRLS-YOLOv4算法识别大型工程机械较Faster-RCNN、SSD、YOLOv3、YOLOv4效果更好,能够为输电线路进行工程机械监测提供参考依据。
关键词:输电线路;目标检测;深度学习;YOLOv4
中图分类号:TP391 文献标识码: A文章编号:2096-4706(2021)23-0159-04
Detection of Large Construction Machinery Based on WRLS-YOLOv4
YU Changsheng1, QIN Lunming1, WANG Xi2, CHEN Peng1
(1.College of Electronics and Information Engineering, Shanghai University of Electric Power, Shanghai 200090, China; 2.School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing 100044, China)
Abstract: In order to solve the problem of transmission line failure caused by non-standard construction of large construction machinery, a detection method for large construction machinery and equipment based on improved YOLOv4 is proposed. The current YOLOv4 algorithm has the disadvantages of low recognition accuracy and high missed detection rate. This paper draws on the idea of hot restart mechanism and set the learning rate to decrease the loss value by periodically decaying the cosine function, improve the recognition accuracy. The label smoothing is introduced to fine-tune the label values of positive and negative samples to avoid network overfitting and reduce the missed detection rate. The experimental results show that the improved WRLS-YOLOv4 algorithm recognizes large construction machinery better than Faster-RCNN, SSD, YOLOv3 and YOLOv4, and can provide a reference basis for construction machinery monitoring on transmission lines
Keywords: transmission line; object detection; deep learning; YOLOv4
0 引 言
輸电线路作为电力网络中的一环,承担着传输电能的角色,其安全稳定的运行是电力系统的重要保障。据统计,在外力破坏造成的输电线路跳闸事故中,有超过70%是由于大型施工机械特别是塔吊,挖掘机,吊车等在施工过程中碰线而引起的[1]。因此,对输电线路周围环境进行大型工程机械监测是十分有必要的。
目前,在大型施工机械检测的研究上,存在识别准确率低,漏检率高的情况。为解决上述问题,本文提出一种WRLS-YOLOv4(Warm Restart & Label Smoothing-YOLOv4)的大型施工机械检测算法。最后以5种典型的工程机械为例,构建图像数据集,通过多组实验对模型进行训练、验证以及测试,结果表明,本文算法较原YOLOv4算法mAP提高了5.43%,平均漏检率降低了0.11。
1 算法原理
1.1 YOLOv4算法原理
YOLOv4算法在YOLOv3的基础上,使用了多种优化策略,在精度和检测速度上均有较大的提升。YOLOv4采用了CSPDarknet53代替YOLOv3的Darknet53作为主干特征提取网络,该网络的卷积模块使用Mish激活函数,其表达式为:
Mish=x×tan[ln(1+ex)] (1)
为了解决图像由于裁剪和拉伸而失真的问题,YOLOv4还引入了SPP结构和PANet结构。
1.2 热重启机制
Loshchilov等[2]提出了基于热重启机制的梯度下降算法SGDR,在每个训练周期开始时,将学习率调整为初始学习率,在下一个周期开始前,学习率逐渐减小,到达下一个训练周期时,学习率重置为初始学习率。研究结果表明,学习率热重启策略虽然在短期内loss值会增大,但在最终的训练结果上,比传统的学习率逐代衰减策略更好,可以使模型逃离局部最优,加快模型的收敛速度,最终提高模型的识别准确率。
1.3 独热编码
对于多分类问题,通常采用one-hot编码[3]的方式对样本所属类别给定一个标签概率值(0或1),例如在一个人、猫和狗的三分类任务中,一个样本的one-hot编码为x=[0,0,1],样本经过网络最后一层的输出为x=[2,3,5],经softmax归一化[4]后的预测结果为y=[0.042,0.114,0.844],公式为:
(2)
模型会更加关注softmax预测结果中接近1的概率值,让0.844越来越接近1。
2 WRLS-YOLOv4算法
2.1 余弦退火衰减学习率
本文借鉴热重启机制的思想,在模型学习过程中,随着时间的推移让学习率动态变化。让学习率在每个周期先从初始学习率线性增加至最大学习率,再以余弦函数的方式衰减至最小学习率,以此为一个周期,下一个周期开始时,学习率重置为初始学习率。在学习率衰减过程中,网络向局部最优点靠拢,在学习率增大时,网络又跳出该局部最优点,向着下一个最优点靠近,如此循环往复,有助于模型的收敛,可以减小loss值,提高算法的识别准确率。
余弦退火衰减学习率的衰减函数为:
(3)
其中ηt表示t时刻的学习率,ηmax为最大学习率,本文设为0.001,ηmin为最小学习率,本文设置为0,Tcur是上一次学习率衰减至当前时刻已迭代的次数,Ti为两次学习率衰减t之间相差的迭代次数,本文设为20。
2.2 标签平滑策略
本文引入标签平滑来调整样本的标签值,调整公式为:
(4)
式中qi和qi´分别为第i个样本调整前和调整后的标签值,K为类别总数,ε是一个较小的超参数,本文设为0.05,用以对分类准确性进行微调,缓解one-hot编码导致的过拟合问题。适当地调整正负样本的标签值,可以防止模型过于关注正樣本的预测值,减小正负样本的输出值差值,从而提高模型的泛化能力和鲁棒性,减小漏检率。
3 数据集与实验
3.1 实验数据集
本文的数据集一共14 785张图片,均拍摄于实际施工现场,图中包含塔吊、吊车、挖掘机、铲车和水泥泵车共5类大型工程机械。对上述工程机械图像,运用Labellmg来标注图像中每种工程机械的真实框并生成xml文件,将图片及对应的标注信息制作成标准的VOC2007数据集格式。
3.2 实验环境与训练策略
本文所使用电脑操作系统为Windows10,使用GPU显卡为NVIDA GRID P40,显存11 GB。本文所使用的软件环境为CUDA10.0,CUDNN7.4.1以及Tenserflow-gpu1.13.1。
在训练之前,划分10%的数据集用于测试,90%用于训练。在训练过程中,再把用于训练部分的数据集划分10%用于验证。由于训练过程需要耗费大量时间,本文通过粗略训练和精细训练的方式进行训练,均采用提前终止机制[5]防止训练结果过拟合。
3.3 评价标准
本文使用平均精度AP、平均精度均值mAP、平均漏检率mMR以及每秒帧数FPS来对各个算法训练的模型进行评价。
AP值是指精准率和召回率曲线下的面积,精准率和召回率的公式如下:
(5)
(6)
其中,TP是分类器认为正样本,实际也是正样本的例子,FP是被分类器认为是正样本,实际上是负样本的例子,FN表示分类器认为是负样本,实际上是正样本的例子。由不同的精准率和召回率的点的组合可绘出P-R曲线,AP即是该曲线下的面积。mAP则是把所有类别的AP计算出来然后根据式(7)求平均值。
(7)
其中K为类别总数。
MR是单一类别的漏检率,mMR即为所有类别漏检率的平均值,单一类别的漏检率计算公式为:
(8)
式中,xi为第i张图片的漏检率,M为某一类图像的总数,mMR值越小,模型性能越好。
FPS是指每秒内处理图片的数量,可以反映模型的检测速度能否达到实时检测的要求。FPS值受设备性能影响,本文均在同一设备下对各个模型的FPS进行对比分析。
4 实验结果与分析
4.1 余弦退火衰减实验
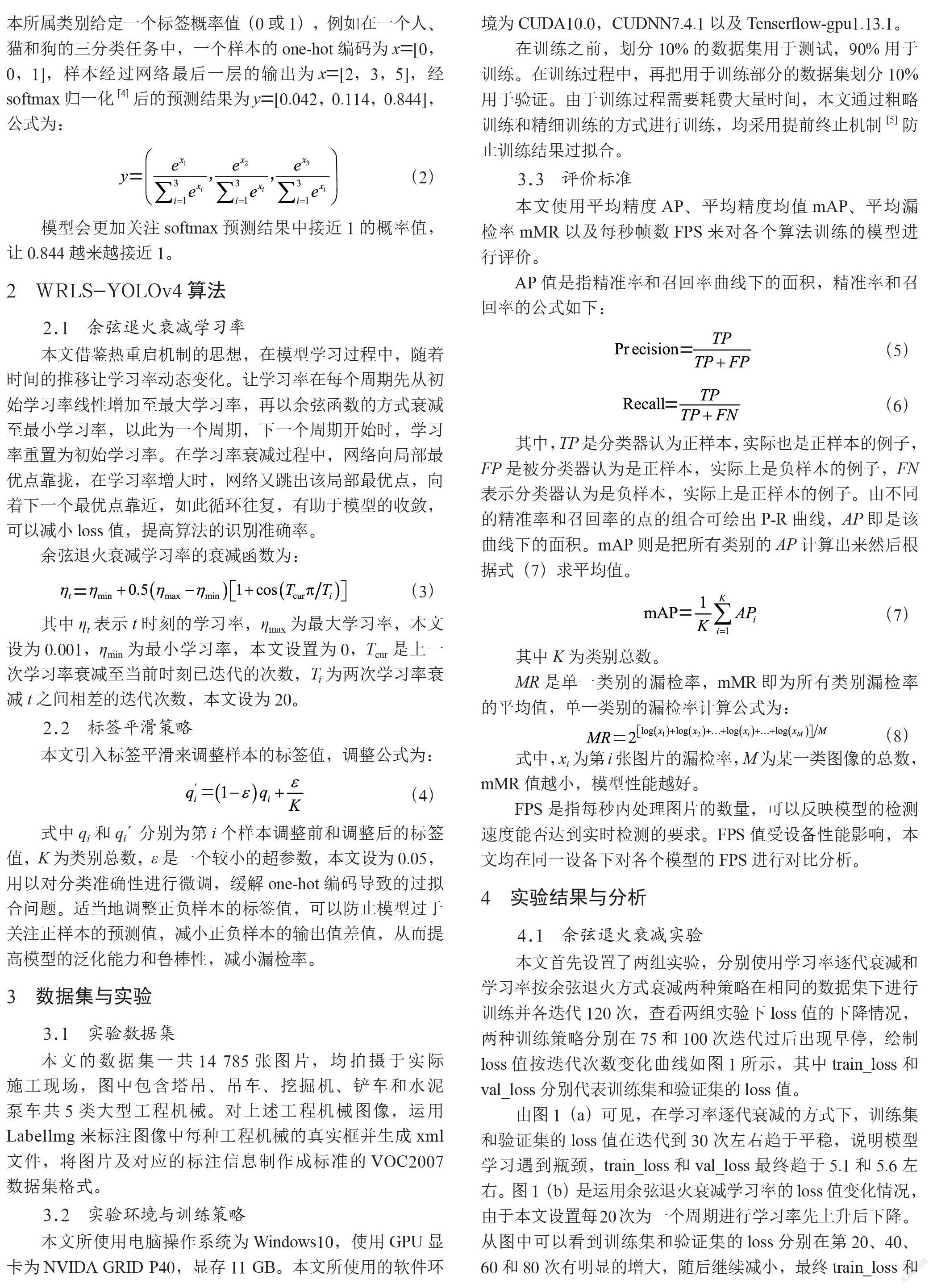
本文首先设置了两组实验,分别使用学习率逐代衰减和学习率按余弦退火方式衰减两种策略在相同的数据集下进行训练并各迭代120次,查看两组实验下loss值的下降情况,两种训练策略分别在75和100次迭代过后出现早停,绘制loss值按迭代次数变化曲线如图1所示,其中train_loss和val_loss分别代表训练集和验证集的loss值。
由图1(a)可见,在学习率逐代衰减的方式下,训练集和验证集的loss值在迭代到30次左右趋于平稳,说明模型学习遇到瓶颈,train_loss和val_loss最终趋于5.1和5.6左右。图1(b)是运用余弦退火衰减学习率的loss值变化情况,由于本文设置每20次为一个周期进行学习率先上升后下降。从图中可以看到训练集和验证集的loss分别在第20、40、60和80次有明显的增大,随后继续减小,最终train_loss和val_loss都能降到4以下。说明运用学习率余弦退火衰减策略可以使模型学习跳出局部最优,寻找一下个最优点,相较于学习率逐代衰减的方法,最终的loss值更小,从而提高算法的识别准确率。
4.2 标签平滑实验
设置运用标签平滑以及不使用标签平滑的两组实验,均在相同的训练集和验证集下进行训练并迭代100次,其中包括30次粗略训练,70次精细训练,再用相同的测试集对训练好的模型进行测试,比较每一类工程机械的Precision、AP值以及单类别漏检率MR。
在YOLOv4的基础上,引入标签平滑后,在略有牺牲铲车AP值以及漏检率不变的情况下,吊车,水泥泵车,塔吊以及挖掘机的AP值分别提高了2.86%、4.41%、1.13%、0.73%,漏检率减小了0.04、0.03、0.02、0.02,说明引入标签平滑能够提高样本的平均精度,提高模型的泛化能力,降低漏检率。
4.3 余弦退火和标签平滑组合对比实验
通过对余弦退火衰减学习率和标签平滑两种策略进行不同的组合,在相同的训练集和验证集下进行训练并迭代100次,其中包括30次粗略训练,70次精细训练,比较不同组合方法下的模型的检测效果,计算其mAP,得到如表1所示。
从表1可以看出,YOLOv4在单独引入余弦退火衰减学习率以及标签平滑的策略后,mAP较原YOLOv4分别提升了1.66%和1.69%,说明两种策略对模型的训练都有一定的提升作用。本文在YOLOv4的基础上,同时引入两种策略来训练模型,mAP可达88.20%,较原YOLOv4提升了5.43%,表明兩种方法配合使用相比于单独使用得到的模型效果更优。
4.4 不同算法对比实验
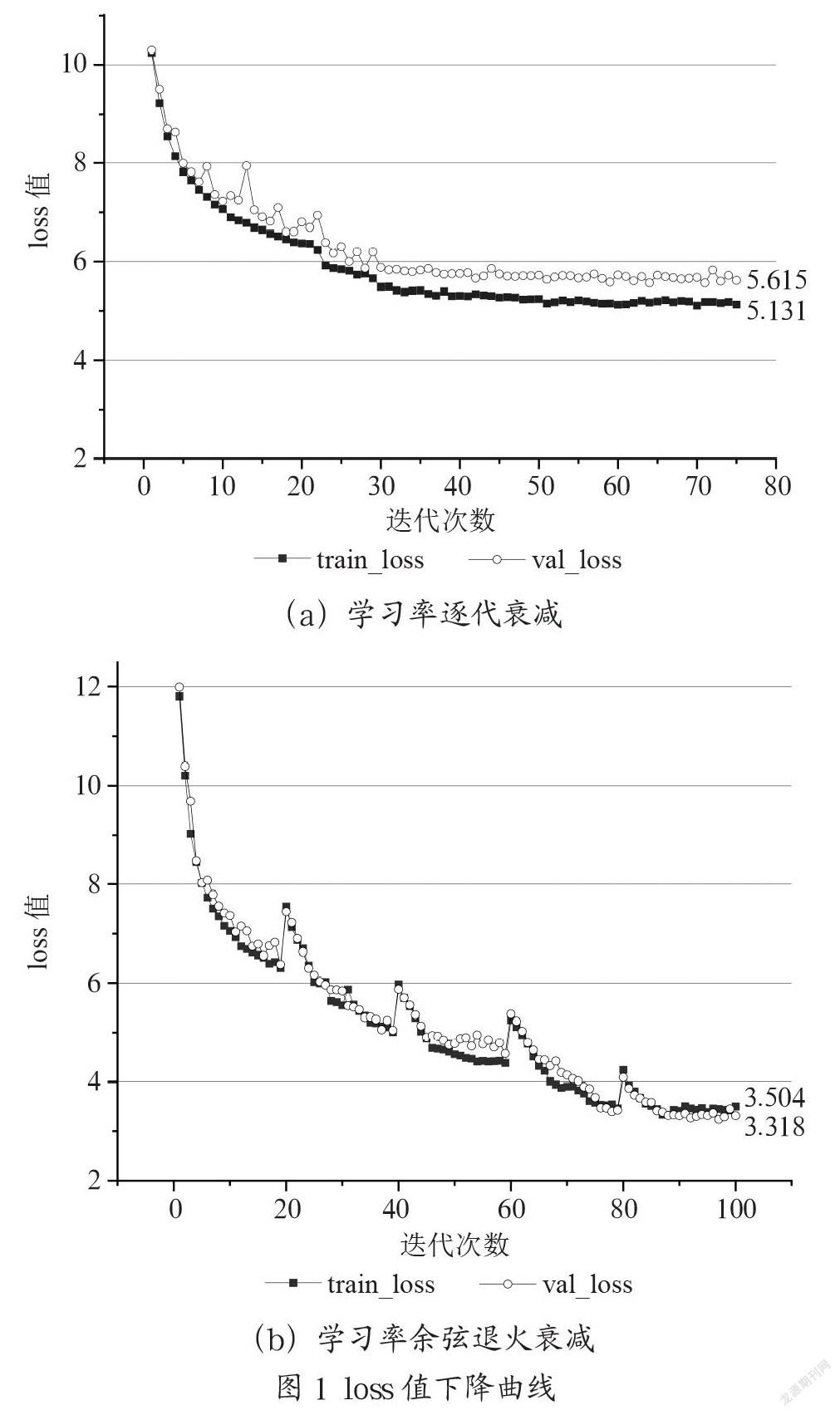
给定相同的训练集和测试集,设置相同的训练条件,分别使用Faster RCNN、SSD、YOLOv3、YOLOv4和本文算法分别进行100次迭代的训练,包括30次粗略训练以及70次精细训练,比较各个算法训练模型的mAP,mMR以及FPS指标,结果如表2所示。
从实验结果可以看出,5种算法中,Faster RCNN的mAP达89.13%,虽略高于WRLS-YOLOv4算法,但其FPS仅有4.6,远不能满足实时检测的要求。SSD算法的检测速度最快,FPS可达44.8,但其mAP只有74.81%,检测准确率较低且平均漏检率较高。WRLS-YOLOv4算法的平均精度均值可达88.20%,较SSD、YOLOv3以及YOLOv4提升了13.39%、10.5%、5.43%,平均漏检率较原YOLOv4减小了0.11,有效改善了YOLOv4漏检率高的缺陷。
为更直观地验证本文方法的检测效果,分别应用4种算法以及本文算法对大型工程机械图像检测。
在场景1的对比中,SSD存在明显的漏检情况,其他算法均能检测到3个吊车。在场景2中,YOLOv3和SSD没有检测到远点的塔吊,本文算法和其他两种算法可以检测到全部4个工程机械。场景3中,共有6个塔吊,SSD仅检测到两个,YOLOv3漏检1个,YOLOv4检测到了全部6个塔吊,但本文算法检测到的塔吊准确率均高于YOLOv4。在场景4的对比中,只有本文算法检测到了远点的挖掘机。通过对比不同算法模型的检测效果可以看出,本文方法训练出的模型效果更优,识别准确率更高,漏检率更低。
5 结 论
本文针对大型工程机械不规范施工而导致输电线路故障以及对YOLOv4算法识别准确率低,漏检率高的问题进行研究,提出一种WRLS-YOLOv4的大型工程机械检测算法。以YOLOv4为基础网络结构,引入学习率余弦退火衰减策略,加速模型跳出局部最优,提高识别准确率。通过标签平滑对样本标签值进行调整,提升模型泛化能力,减小漏检率,并针对输电线路周围常见的工程机械建立数据集,进行多组实验测试及验证。通过对比不同算法效果,表明本文算法比原始的YOLOv4方法检测效果好,在识别准确率以及漏检率方面都有提升,可以对输电线路周围环境的大型工程机械进行检测识别,为其安全运行提供保障。
参考文献:
[1] 刘建伟,周娅,黄祖钦,等.高压输电线路除冰技术综述 [J].机械设计与制造,2012(5):285-287.
[2] LOSHCHIOV I, HUTTER F. SGDR:Stochastic Gradient Descent with Warm Restarts [J/OL].arXiv:608.03983 [cs.LG].[2021-11-03].http://arxiv.org/abs/1608.03983,2016.
[3] 邱志斌,朱轩,廖才波,等.基于目标检测的电网涉鸟故障相关鸟种智能识别 [J].电网技术,2022,46(1):369-377
[4] 朱松豪,赵云斌.基于半监督生成式对抗网络的异常行为检测 [J].南京邮电大学学报,2020,40(4):50-56.
[5] 谢斌红,袁帅,龚大立.基于RDB-YOLOv4的煤矿井下有遮挡行人检测 [J/OL].计算机工程与应用,(2021-04-20).https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=JSGG2021041800B&uniplatform=NZKPT&v=3Qinehu7XHJ1uiLWDnHwCMeat_k_uuMqdTuQF5FxoOrvXKBp-3BWElhF90pYeA29.
作者简介:余长生(1996—),男,汉族,四川内江人,硕士在读,主要研究方向:异物检测;通讯作者:秦伦明(1983—),男,汉族,江苏靖江人,讲师,博士,主要研究方向:电力设备在线监测、多源图像视频信息处理等;王悉(1980—),男,汉族,河北邯郸人,副教授,博士,主要研究方向:列车智能驾驶,模型预测控制;陈鹏,(1997—),男,汉族,山东青岛人,硕士在读,主要研究方向:深度学习与目标检测。
猜你喜欢
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14