基于多信号参数融合的目标测向分析
2021-05-07 18:23:19李钊
现代信息科技 2021年21期
关键词:方位角


摘 要:对目标的测向主要是基于单参数的比幅测向原理,但无论采用哪一种单参数进行测向,测向目标位置的收敛时间和定位精度都无法满足越来越快的运用需求。文章介绍了方位角与信号重复频率融合和方位角与相位变化率融合的方法对目标进行测向,给出了方位角与信号重复频率融合和方位角与相位变化率融合的原理和方法。通过仿真分析表明,该融合测向适用范围广,测向角度误差小,在测向精度上远远优于任何单参数测向的方法。
关键词:方位角;重复频率;相位变化率;参数融合;测向
中图分类号:TN974 文献标识码:A文章编号:2096-4706(2021)21-0025-04
Abstract: The target direction finding is mainly based on the single parameter amplitude comparison direction finding principle, but no matter which single parameter is used for direction finding, the convergence time and positioning accuracy of the DF target position can not meet the faster and faster application requirements. In this paper, the methods of azimuth and signal repetition frequency fusion and azimuth and phase change rate fusion are introduced to detect the direction of the target. The principles and methods of azimuth and signal repetition frequency fusion and azimuth and phase change rate fusion are given. The simulation analysis shows that the fusion DF has wide application range and small DF angle error, and is far better than any single parameter DF method in DF accuracy.
Keywords: azimuth; repetition frequency; phase change rate; parameter fusion; direction finding
0 引 言
對辐射目标进行测向的技术是使用接收设备对辐射源进行无源测向[1]的方法,这种方法具有不需要多个接收设备之间的协同工作和互联数据,同时结构相对简单、容易工程实现等优点,提供一种机动性强的测向方法。目前,常用的单站无源测向具体实现方法主要有:方位测量测向法[2]、到达时间测量测向法[3]、多普勒频率测量测向法[4]、相位变化率测量测向法[5]、多普勒变化率测量测向法[6]、方位/到达时间测向法[7]、方位/多普勒频率差测向法[8]、方位/相位变化率测向法[9]等。只利用某个单一的信息源对目标定位一般都存在着精度差和收敛速度慢的特点,因此本文主要以滤波方法[10]为工具,研究对固定辐射源的测向方法,主要探讨在到达方位角的基础上,分别增加了脉冲重复频率和相位变化率基础上的单站测向技术方法,研究多信息参数融合对测向精度的提高。
1 辐射目标测量原理
1.1 比幅测向
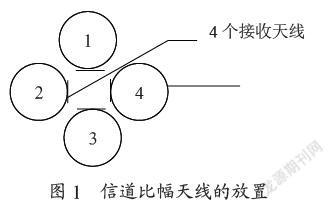
测向是电子接收设备中的重要部分,为了快速和简单,大部分的电子接收设备都采用幅度比较[11]的办法测定信号的方位。它是将一组天线放置成指向不同的方向,比如一个圆周的东、南、西、北4个方向,如图1所示。
假设天线所接收的信号方向是正东北方向,图中1、4两个天线指向该方向附近,收到的信号较2、3两天线强,而且正东北方向正好在北和东之间,从而1、4两天线收到的信号从它们各自的端口输出时强度将相当。这样,如果我们知道4个天线输出的信号的相对强弱就可以换算出信号的方位。很容易想象,如果采用数量更多的天线,可供计算的信息就更多,测向的精度可能就更好。天线使用多少,将根据不同的要求而定,可以有4个、6个、8个等。但大部分告警设备的测向精度不一定要求很高,为了简单和降低成本,大多采用4个天线的比幅系统。
1.2 干涉仪测向
1.2.1 一维相位干涉仪
一维相位干涉仪又分为单基线和多基线两种。其基本的测向公式为:
其中,φ为到达干涉仪基线两个端点的相位差,D为干涉仪基线长度,θ为测量信号的方位角,λ为测量信号的波长。
当D<λ/2时,测量值就反映了真实值的大小;而当D>λ/2时,由测量值就可能得到多个真实值的估计,出现了“相位模糊”问题。为了解决这个问题,可以采用干涉仪长基线和短基线相结合的方法。使用干涉仪短基线的相位,可以计算出干涉仪长基线实际相位的精确值,当干涉仪的最长基线长度越来越长时,解相位模糊所需要的干涉仪阵的天线单元数量就越多,此时该系统的测向精度也越高。
1.2.2 二维相位干涉仪测向
二维相位干涉仪同样可分为单基线和多基线两种,但二维相位干涉仪的测向天线阵可以有很多种排列方式,例如三角阵形式,圆形阵形式,五元正交形式等。二维相位干涉仪基本测向公式同一维的情况,只是二维所测的相位差还与来波信号的仰角有关。
二维相位干涉仪测向与一维相比,可以实现全方位的测向,同时二维单基线可以消除仰角带来的模糊,二维多基线可以消除相位模糊。随着基线长度的增加,测向精度也会提高。
2 对目标测向的模型
2.1 测向轨迹
在实际测量中,两条以上的测向轨迹一般都不会相交在一个点上,因为测量存在测量噪声,对目标测向的示意图如图2所示。
假設各个时刻平台的位置为[xoi,yoi]T,(i=1,2,…,N),目标的位置为[xt,yt]T,则相应的量测为:
对目标测向的过程即为采用所有的测量φi和相应的平台位置进行目标定位解算。
批处理算法仅适合于监控跟踪静态目标,对实时性要求较高的情况无能为力,且稳定性较差,定位结果受场景,及测角精度的影响较大。同时增加测量数据带来的精度提高很小而计算量却大幅增加,需要进一步深入研究以提高实时性。使用滤波器实现对固定目标的实时跟踪,对漂移瑞利滤波器进行改进,使之适用于固定目标的跟踪模型,用于对固定目标的跟踪。不仅可以获得较为稳定的跟踪精度,而且对平台轨迹的优化和引导均有一定的指导意义。
在对固定目标的定位过程中,常会出现接收数据率不稳定的情况,然而由于目标静止时,其状态随滤波间隔是不变的,等间隔的滤波算法同样适用于这样的场景。
用对漂移瑞利滤波器(The Shifted Rayleigh Filter, SRF)[12]实现对固定目标的实时跟踪,使之适用于固定目标的跟踪模型,用于对固定目标的跟踪。不仅可以获得较为稳定的跟踪精度,而且对平台轨迹的优化和引导均有一定的意义。
2.2 漂移瑞利滤波器
SRF是由Clark针对2/3维的仅有角度测量值的跟踪问题而提出的一种新的时刻匹配滤波算法。该算法适用于多种场景,而且针对模型的维数没有限制。
对固定目标的跟踪,不涉及速度信息,因此,如果采用传统的SRF则会因为目标状态中的速度信息不准确,即存在信息冗余,使得跟踪精度降低。因此,有必要对传统的SRF进行改进,去掉速度维信息,仅对目标的位置进行滤波跟踪。
2.3 迭代漂移瑞利滤波器
当采用滤波器对目标进行跟踪时,滤波初值的获得会影响滤波的收敛时间和最后的定位精度,初值太差甚至可能引起滤波发散现象,无法得到满意的定位结果。然而定位的结果确实随着时间的推移在逐步修正调整,而考虑到对固定目标进行跟踪时,由于目标是静止状态,因此在各个时刻对目标的状态估计均可认为是同时刻的定位值。基于此本项目提出了一种迭代的SRF方法,将累积N个时刻的测量信息进行批处理,采用反复滤波,其过程如下:
(1)采用测向交叉获得对目标位置的初始估计;
(2)基于SRF进行状态滤波,得到一组目标位置的估计值;
(3)判断第一时刻目标位置估计与最后一个时刻目标位置估计的距离,若大于门限D1,则取N时刻的滤波状态作为下一次循环滤波的初值;否则,取N个时刻的定位重心作为下次循环滤波的初值;
(4)重复(2)、(3)直到N个时刻的定位半径小于门限D2或者迭代次数大于最大迭代次数。
以最后一次迭代滤波的N个时刻定位值的重心作为对目标的位置估计。
通过对测向数据的多次迭代利用,即可以提高对固定目标的一次定位精度。同时,考虑到实际情况下为了实现对固定目标的更为精确的定位,可能需要反复对目标进行侦察进行多次探测。则可利用该方法,将上一次所获的雷达的定位结果作为下一次对该雷达目标探测的先验信息(即定位初始),利用迭代的SRF,可获得更高的定位精度。
3 多信号参数融合测向
3.1 方位角与信号重复频率融合
从方程确定了一个包含测量目标在内的曲面,如果多个这样的曲面都能得到,就可以通过这些曲面的相交电得到测量目标的位置,实现对辐射目标的测向。
3.2 方位角与相位变化率融合
如果接收设备的两个天线阵单元A、B接收到的辐射信息的相位差为φ,如图3所示。
接收系统上的两个单元干涉仪天线阵,可以获得辐射源辐射信号的相位差变化率,含有辐射源目标的位置信息。
4 仿真及分析
根据上述运算验证实际使用的多信号参数融合测向算法构建场景进行仿真试验。仿真设定观测平台对目标测向的运动轨迹的模拟实际角度变化如图4所示。
仿真时间总共为6 370 s,观测平台的初始测向角度为280°,观测平台测向运动角度为无规则运动,变化模拟真实的观测平台测向时的运动轨迹为无规则运动角度,能做到模拟场景更为真实,仿真数据更加真实可靠,更利于后续实际验证。
多信号参数融合测向算法的观测平台对目标测向的角度变化如图5所示。
从上述仿真图可以看出,观测平台对目标测向角度变化和实际模拟的角度趋势是一致的。
多信号参数融合测向算法的观测平台对目标测向误差如图6所示。
从观测平台的测向误差可以看出,多信号参数融合测向算法,在大多情况下能达到测向误差10°以内,由于观测平台测向角度的突然大幅度变化会引起测向误差的激增,但在观测平台测向角度变化均匀变化时,测向角度误差还是能达到10°以内,整个仿真结果还是令人满意的。
5 结 论
在目标测向中,首先通过辐射源目标与观测平台的相对位置获取方位信息,然后运用方位角与信号重复频率融合以及方位角与相位变化率融合测向算法,结合推导测量信息扩维的漂移瑞利滤波器滤波过程,估计出辐射源目标的位置。通过多信号参数融合测向的仿真结果,验证了引入多信息参数对测向精度的优越性,这也说明了融合测向适用范围广,测向角度误差也在较小的范围内,非常适合实际运用。
参考文献:
[1] 李鹏.基于改进的Hough变换的多目標无源测向交叉定位技术 [J].舰船电子对抗,2017,40(3):12-16+34.
[2] 闫文娟,王水璋.六通道无线电监测与测向定位系统的设计与实现 [J].电子测量技术,2018,41(9):116-121.
[3] 李家蓬,安强,付磊,等.多点定位系统脉冲到达时间测量技术研究 [J].舰船电子工程,2021,41(1):30-33+45.
[4] 秦永,邬赟,魏朝平,等.基于时差和多普勒频率的双发单收目标定位系统性能分析 [J].南昌工程学院学报,2021,40(3):61-66.
[5] 郭辉,吉荣华,张君,等.2种影响相位干涉仪测向的问题分析 [J].航天电子对抗,2021,37(1):47-49+64.
[6] 马永圣,张敏,郭福成.多星多普勒频率变化率无源定位方法 [J].航天电子对抗,2017,33(4):17-21+56.
[7] 王长生.基于空/时周期平稳特性的波达方向/时差估计方法研究 [D].成都:电子科技大学,2020.
[8] 刘梦竹.基于到达时间与频率估计的高精度多星无源定位方法研究 [D].哈尔滨:哈尔滨工业大学,2019.
[9] 韦北余,邢明强,王建,等.一种基于比幅比相的星载告警测向方法 [J].航天电子对抗,2021,37(4):48-56.
[10] 安春莲,杨古月,杨延菊.基于中值滤波预处理的强冲击噪声背景测向方法 [J].电子学报,2021,49(6):1159-1166.
[11] 张文东,江炜宁.基于数字中频的短波测向技术 [J].国外电子测量技术,2009,28(3):25-27.
[12] 余骁,邓小波,丁继烈,等.基于碘分子滤波器的星载高光谱测温激光雷达瑞利散射信号仿真 [J].成都信息工程大学学报,2018,33(2):119-123.
作者简介:李钊(1979—),男,汉族,四川成都人,高级工程师,硕士,主要研究方向:电子对抗总体技术。
猜你喜欢
结构工程师(2022年2期)2022-07-15 02:21:32
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
中国电子科学研究院学报(2019年1期)2019-03-06 10:26:04
现代计算机(2018年19期)2018-08-01 08:06:28
城市勘测(2018年3期)2018-07-13 06:49:58
中学生数理化·七年级数学人教版(2017年1期)2017-03-25 09:41:00
测绘通报(2017年2期)2017-03-07 09:55:10
科技创新与应用(2016年9期)2016-05-14 17:43:25
河南科技(2015年18期)2015-11-25 08:50:14