
车载移动测量系统方位角对比与分析
2017-03-07 09:55钱瑾斐姚连璧
测绘通报 2017年2期
钱瑾斐,姚连璧,2
(1. 同济大学测绘与地理信息学院,上海 200092; 2. 同济大学现代工程测量国家测绘地理信息局重点实验室,上海 200092)
车载移动测量系统方位角对比与分析
钱瑾斐1,姚连璧1,2
(1. 同济大学测绘与地理信息学院,上海 200092; 2. 同济大学现代工程测量国家测绘地理信息局重点实验室,上海 200092)
方位计算对移动测量计算具有重要的意义,本文通过移动测量系统的实测数据,分别在静态环境与动态环境下比较车载移动测量系统的惯性测量单元(IMU)、双天线及轨迹拟合方位角。结果表明:在静态环境下,双天线方位角精度高于IMU方位角的精度;在动态环境下,IMU方位角与拟合方位角在直线段处的表现较好,而在转弯处,双天线方位角的绝对精度更高。
移动测量系统;方位角;惯性测量单元;双天线GNSS;轨迹拟合
车载移动测量系统是一种信息采集与处理系统[1],通过所集成的多传感器平台,能够快速准确地收集数据,有着广泛的应用领域[2-3]。
在移动测量系统中,方位角作为一种十分重要的数据,直接参与系统中位置与姿态的计算。同济大学集成卫星接收机、惯性导航单元、激光断面仪、全景相机等搭建了移动测量系统,实现了数据采集、处理与应用,取得了一定的成果[4-5]。在该系统中,主要的姿态测量传感器为惯性测量单元,该惯性测量单元由3个单轴50型环形激光陀螺仪、3个高精度石英挠性加速度计、减振器及安装机械构件组成,是一款高性能的惯性测量设备,可用于导航、控制和动态测量,并通过多项补偿保证测量精度,密封设计及严格工艺保证产品在恶劣的环境下仍能精密地测量载体的角运动和线运动参数,横滚角和俯仰角测角精度为0.05°,运动的方位角精度为0.1°。
车载移动测量系统中所使用的GNSS传感器为双天线GNSS定位定姿仪。该仪器为双频GNSS接收机,能够接收GPS和GLONASS两个系统的卫星信号,通过NMEA-0183协议,能够直接输出方位角数据。同时为了尽可能地提高移动测量系统定位定姿的精度和可靠性,定位模式采用RTK模式,接入上海测绘院CORS系统,在整周模糊度固定即固定解的情况下,平面上定位精度能达到±0.8 cm+1×10-6D,高程点位精度达到±1.5 cm+1×10-6D,在2 m短基线的条件下,标称定向精度为0.09°。通过全站仪精确测量两个天线中心,本移动测量系统双天线基线的精确长度为2.228 m。
此外,当移动测量系统只有一个GNSS接收机,无法直接获取方位角信息时,可以通过轨迹点拟合得到道路线性[6],进而求得方位角。样条(函数)是一种分段多项式,各相邻段上的多项式之间又具有某种连接性质,因此既保持了多项式的简单性和逼近的可行性,又在各段之间保持了相对独立的局部性质,因此样条是一类特别有效的逼近工具[7]。三次样条函数的一阶导数连续,因此可以通过三次样条拟合轨迹来推算方位角。
对于双天线GNSS的方位角,颜国军与赵文晔等研究了基于双天线的GPS姿态测定技术,指出双天线测向技术能够满足二维常规姿态的要求且具有较高的解算精度[7-8]。邹晓亮将双天线方位角应用到组合导航紧组合算法中,提高了组合导航的定位精度[9]。庞春雷等研究了将双天线GPS应用于低精度IMU的初始对准中的算法,提高了IMU航向角的精度[10]。
目前为止,尽管对于双天线方位角测向技术及IMU与双天线方位角在组合导航中的应用方面已经有了不少的研究,但通常利用一种数据提高另一种数据的精度或通过卡尔曼滤波器等融合两种数据计算来提高定位精度,而对于原始数据对比与分析的研究仍比较少。因此,本文基于笔者所在学院的车载移动测量系统,在静态与动态环境下分别进行测试,对几种方位角的精度与特性进行比较与分析。
1 测试简介
对移动测量系统惯性测量单元与双天线GNSS方位角的测试主要分为静态测试与动态测试。静态测试是将移动测量车停放在同济大学内一个开阔、无信号干扰等GNSS观测条件良好的空旷场地,使移动测量车保持在静止的状态下,同时采集GNSS方位角与IMU姿态角数据,得到静态环境下IMU姿态角和双天线GNSS方位角。
动态测试即实际在道路上行驶的测试。为了尽量保证GNSS信号的接受质量,动态测试选择在上海逸仙路高架曲阳路至军工路段,来回全长约20 km,测试分别于2014年11月14日与2015年5月19日各进行了一次,测试行驶路线如图1所示。
2 测试结果与分析
2.1 测试结果分析
通过计算静态测试数据,得到IMU姿态角和双天线GNSS方位角的平均值与标准差,见表1。

图1 动态测试行驶路线

表1 IMU及GNSS双天线姿态角静态测试结果 (°)
从测试结果来看,在静态条件下,IMU的横滚角、俯仰角的标准差分别为0.017°和0.008°,小于标称精度,而方位角的标准差为0.108°,略大于所标称的运动方位角的精度;双天线GNSS方位角的标准差为0.051°,符合标称精度,并且高于IMU方位角的精度。可以看出,IMU的姿态角和双天线方位角的精度基本满足标称精度;但是在长时间静态观测时,由于IMU内部的陀螺仪的漂移现象导致IMU方位角的精度比双天线的方位角差。此外,可以看到,IMU与GNSS双天线的方位角存在着0.323°的夹角,这是因为IMU与双天线的轴向因安装误差等原因没有完全对准造成的,因此在使用两种方位角时要考虑这个差值。
2.2 动态测试结果分析
动态测试时,在高架上,由于周边高楼遮挡等影响,GNSS的解算状态存在浮点、差分甚至单点解的情况。因此,为了保证双天线GNSS方位角的精度,从上述的实测数据中再挑选出GNSS解算状态为固定解的路段且连续的GNSS观测数据,如图2所示。

图2 固定解行驶轨迹
图2中,(a)中轨迹1总长约3842 m,测量于2014年11月14日,车辆的行驶方向为从南向北;(b)中轨迹2的总长约1517 m,测量于2014年11月14日,车的行驶方向为从北向南;(c)中轨迹3的总长约3892 m,测量于2015年5月19日,车的行驶方向为从南向北;(d)中轨迹4的总长约6109 m,测量于2015年5月19日,车的行驶方向为从北向南。由此分别获得4段IMU方位角、双天线GNSS方位角及样条拟合方位角的数据,如图3所示。

图3 IMU与双天线GNSS方位角数据
2.2.1 方位角在直线段的对比与分析
为了更好地分析动态测试情况下各种方法计算方位角的差异,本文以行驶路线的形状来区分出两种行驶情况:①直线段;②曲线段。直线段是指移动测量车的行驶轨迹为直线或接近于直线;曲线段是指移动测量车的行驶轨迹为曲线,即车辆正在转弯。
在直线段,对比IMU方位角、双天线方位角与拟合方位角,如图4所示。图中为2014年11月14日的部分数据,可以看出,在直线段运动过程中,IMU方位角与拟合方位角的时间序列的波动幅度比GNSS双天线方位角的时间序列小,IMU方位角、双天线方位角与拟合方位角相互之间都明显地存在着一个夹角。
以IMU方位角为基准,分别计算图3中4段轨迹直线段IMU方位角与双天线GNSS方位角、IMU方位角与拟合方位角及GNSS方位角与拟合方位角的差值平均值及其标准差,见表2。
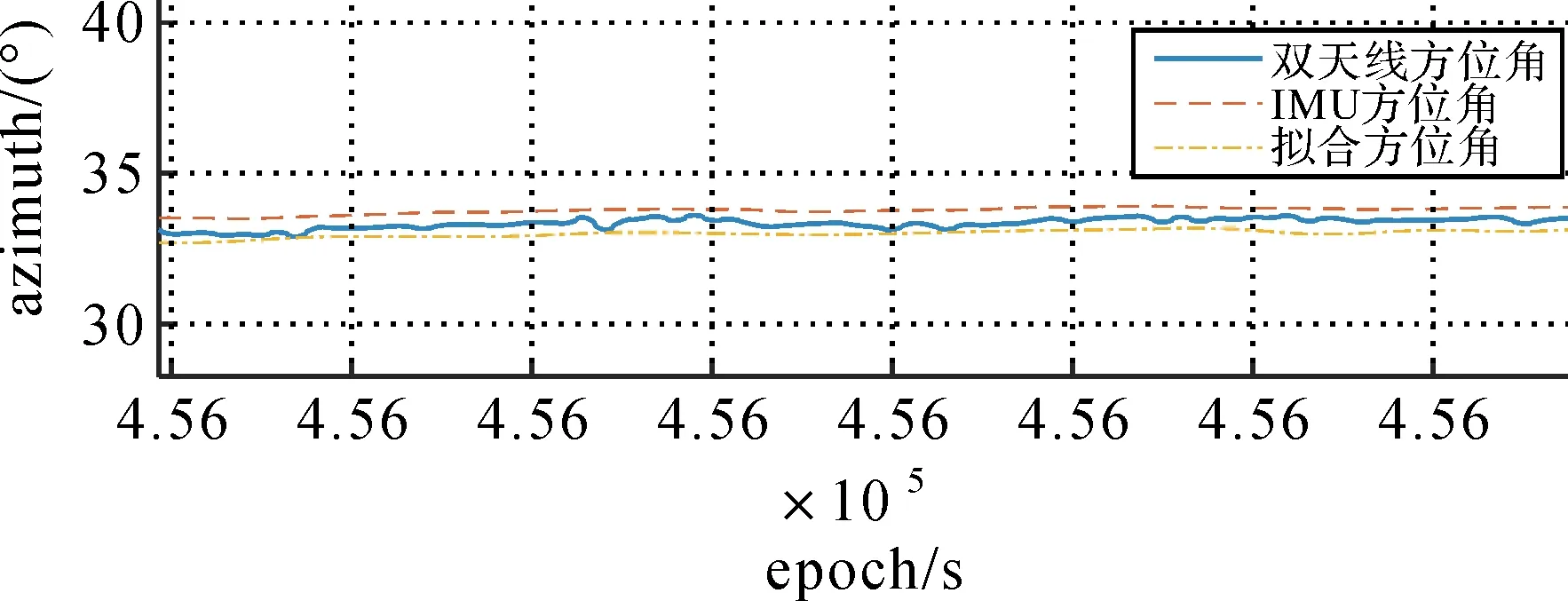
图4 直线段方位角对比
在表2中,从三者的精度方面来看,双天线GNSS方位角与IMU方位角的差值平均值的标准差分别为0.183 9°、0.254 8°、0.162 2°及0.139 4°,标准差的平均值为0.18°,因此,在设IMU方位角为基准参照的条件下,双天线方位角的标准差最大达到了0.254 8°,达到了标称精度的2倍多,说明双天线输出方位角在实际行驶过程时精度较差,相比较而言,拟合方位角的精度表现比较好,标准差为0.1°左右。
从三者相互夹角来看,与静态测试中的相同,因为安装误差的关系,IMU方位角与双天线方位角之间存在着一个约0.3°~0.4°的夹角。此外,表2中,对于直线段,坐标样条拟合得到的方位角也同样与IMU方位角和双天线GNSS方位角存在着夹角,分别约为0.7°与0.35°,可以认为直线段轨迹拟合得到的方位角等于车辆行进的方位角方向,则当前移动测量车IMU与双天线的轴线相较车体坐标系的行进方向偏右,其偏差可以通过上述拟合方位角的结果进行标定,进而提高航位推算结果的精度。

表2 直线段IMU方位角、双天线GNSS方位角与拟合方位角差值的平均值及其标准差 (°)
2.2.2 方位角在转弯处的对比与分析
在转弯处,IMU方位角与GNSS双天线方位角的差异,如图5所示。
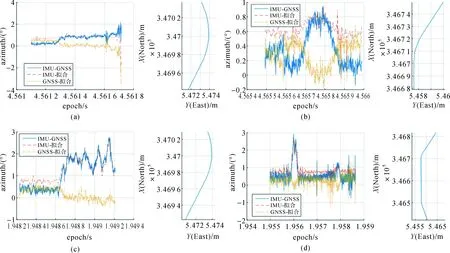
图5 转弯处不同方位角的差异
在图5中,左侧为3种方位角的互差,分别是IMU方位角减双天线方位角、IMU方位角减拟合方位角、双天线方位角减拟合方位角;右图为左图数据相应的平面轨迹,(a)与(c)中,车辆向北行驶,(b)与(d)中,车辆向南行驶。可以看出,除了由安装误差导致的偏角外,在转弯处,IMU与GNSS方位角两者差值的时间序列在数值上都产生了增大的现象,大小从1°~2.5°不等,对于转弯处双天线与拟合方位角差值的时间序列,则存在着两者差值减小的现象。由于双天线方位角是由两个天线空间位置定位得到的,相比IMU不存在漂移等现象,绝对精度更高,因此在转弯处双天线方位角的方向更能反映出车体方向。
而对于轨迹拟合方位角,在直线处,如图4所示,除安装误差外,在数值上与IMU和双天线方位角差别不大,但在转弯处,如图5所示,车辆运动轨迹的切线即拟合方位角与车身的轴线方向实际上是不相同的。当转弯半径比较大时,对拟合方位角与双天线的差值在0.5°左右。当转弯半径比较小时,如图6所示,此时轨迹的切线与车身的轴线方向相差较大,则轨迹拟合的方位角无法真实地反映出移动测量系统的当前方向。
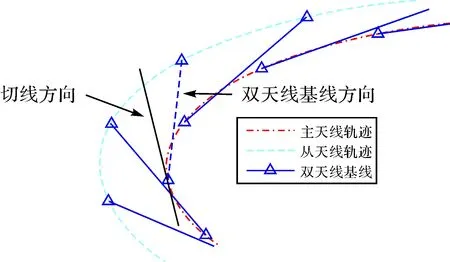
图6 大拐弯处双天线GNSS方向与轨迹切线对比
3 结束语
本文分别在静态环境与动态环境下对IMU和GNSS方位角数据的差异进行了比较与分析。相比其他已有研究成果,本文着重对两者原始未经处理的数据进行比较与分析,得出了以下结论:①由于存在安装误差,各方位角的轴线方向往往存在小的夹角,因此对方位角进行标定是不可或缺的;②在静止状态下,由于陀螺仪漂移等的影响,长时间下IMU方位角的精度比双天线方位角的精度要差;③在移动测量系统直线行驶或接近直线行驶的状态下,除安装误差外,3种方位角中准确度方面差别不大,IMU方位角与轨迹拟合方位角的精度较高;④在移动测量系统转弯时,宜采用双天线的方位角结果为准,在转弯半径比较大且只有单天线轨迹数据时,可
采用拟合方位角替代,在其余情况下,则使用IMU方位角作为移动测量系统的方位角参考。对于本文中的移动测量系统在转弯处IMU与双天线方位角的数值相差较大具体原因,以及这种现象对该移动测量系统的影响,则需要作进一步深入的研究与分析。
[1] 李德仁.移动测量技术及其应用[J].地理空间信息, 2006, 4(4):1-4.
[2] 张智勇.全景移动测量系统及其应用前景展望[J].测绘通报, 2014(3):79-81.
[3] 侯亚娟, 葛中华.车载移动测量系统在大比例尺地形图质检工作中的应用研究[J].测绘通报, 2015(11):60-63.
[4] 周冰.移动测量系统的实现及数据采集[D].上海:同济大学, 2013.
[5] 徐恒立.移动测量系统的定位与定姿[D].上海:同济大学, 2015.
[6] 张玲.基于三次样条曲线拟合公路平面线形方法研究[D].武汉:武汉理工大学, 2007.
[7] 颜国军.基于双天线的GPS姿态测定研究与实现[D].南京:南京航空航天大学, 2005.
[8] 赵文晔.基于双天线的GPS测姿系统研究[D].苏州:苏州大学, 2009.
[9] 邹晓亮.车载测量系统数据处理若干关键技术研究[D].郑州:信息工程大学, 2011.
[10] 庞春雷, 赵修斌, 余永林,等.低精度初始对准双天线测向互辅算法[J].西安电子科技大学学报(自然科学版), 2014, 41(6):167-173.
Comparison and Analysis of Azimuth of Mobile Mapping System
QIAN Jinfei1,YAO Lianbi1,2
(1. College of Surveying and Geo-informatics, Tongji University, Shanghai 200092, China; 2. Key Laboratory of Modern Engineering Surveying, NASMG, Shanghai 200092, China)
Orientation is of great importance for mobile mapping survey. The azimuths of inertial measure unit(IMU), dual antenna GNSS and trajectory fitting in static and dynamic environment are analyzed by measured data from a mobile mapping system. The result shows that azimuth of dual antenna GNSS is more precise than azimuth of IMU in static environment. While azimuths of IMU and trajectory fitting have better performance in dynamic environment, azimuth of dual antenna GNSS has higher absolute precision in the curve sections.
mobile mapping system; azimuth; inertial measure unit; dual antenna GNSS; trajectory fitting
钱瑾斐,姚连璧.车载移动测量系统方位角对比与分析[J].测绘通报,2017(2):49-53.
10.13474/j.cnki.11-2246.2017.0047.
2016-03-11
国家863计划(2013AA12A206);上海市自然科学基金(15ZR1443700);“十三五”国家重点研发计划(2016YFB1200602-02)
钱瑾斐(1990—),男,硕士生,研究方向为移动测量系统多传感器集成与组合导航。E-mail:lqianjf@tongji.edu.cn
P237
A
0494-0911(2017)02-0049-05
猜你喜欢
结构工程师(2022年2期)2022-07-15
计算机技术与发展(2020年9期)2020-11-26
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
现代装饰(2018年5期)2018-05-26
中国神经免疫学和神经病学杂志(2018年6期)2018-01-15
中国三峡(2017年2期)2017-06-09
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
