基于BoW模型的增强RGB-D SLAM算法
2021-05-06 09:38荆树旭卢鹏宇翟晓惠
计算机技术与发展 2021年4期
荆树旭,卢鹏宇,翟晓惠,高 涛
(长安大学 信息工程学院,陕西 西安 710064)
0 引 言
随着智能机器人技术的不断发展,研究者们希望机器人可以像人类一样,通过眼睛去观察和理解周围的世界,完成自身的定位和对周围环境的建模。这个问题被称为即时定位与地图构建(simultaneous localization and mapping,SLAM)[1-4]。视觉SLAM[5]是指通过视觉传感器的方式完成即时定位与地图构建。相比使用激光雷达来获取周围环境信息,视觉传感器具有体积小,重量轻,功耗小,价格便宜等优点[4]。2010年,微软推出了可以同时获取彩色图和深度图的相机Kinect。由于其低廉的价格,使得RGB-D相机在视觉SLAM领域得到了广泛的应用[6-8]。
目前,国内外主流的方法是基于特征点法和图优化法的RGB-D SLAM。2010年,Henry等人[9]最早提出了一种基于深度相机的SLAM算法,该算法首先提取SIFT特征点,然后采用最近迭代点(iterative closest point,ICP)算法求解两帧图像之间的最优变换,最后利用图优化工具TORO进行全局优化。2012年,Henry等人[10]提出了一种改进的算法,该算法利用重投影误差改进随机采样一致性(radom sample consensus,RANSAC)算法[11]的配准过程,使用Fast特征提取和Calonder特征描述符代替之前的SIFT,用稀疏光速平差法(sparse bundle adjustment,SBA)代替TORO进行优化。2011年,Newcombe等人[12]提出的KinectFusion是最早能实现实时三维重建的方案,可以在不需要RGB图只需要深度图的情况下就能实时地建立三维模型。2014年,Whelan等人[13]在KinectFusion的基础上增加了回环检测模块来增强鲁棒性。同年,Endres等人[14]测评了SIFT[15]、SURF[16]和ORB[17]这3种方法在RGB-D SLAM中的表现,在后端采用通用图优化工具g2o进行全局优化,最后采用了八叉树地图OctoMap进行地图的构建。2017年,Mur-Artal R等人[18]提出了ORB-SLAM2,这是一个基于单目、双目和RGB-D相机的完整的SLAM系统。2018年,张震等人[19]利用ORB特征和词袋(bag of words,BoW)模型增强了RGB-D SLAM算法的鲁棒性。
上述算法存在的部分问题:采用暴力匹配算法对特征点进行匹配,需要每个特征与其他所有的特征进行匹配,匹配范围大,耗时严重。RANSAC处理数据时具有随机性的特点,忽略了待匹配点质量的差别。BoW模型不考虑图像中视觉单词的位置信息,会导致回环检测的精度不足。针对上述问题,该文利用BoW模型结合型树层次结构,将特征点划分为特征字典某一特定层的节点,只有属于同一父节点的特征才是潜在的正确匹配,从而缩小匹配范围,提高算法的实时性。利用顺序抽样一致性(progressive sample consensus,PROSAC)算法[20]对图像匹配误差进行剔除并且求解相机位姿,利用视觉词典选出一系列闭环候选帧,对闭环候选帧进行严格的筛选,从而筛选出真正的闭环帧,提高算法的鲁棒性。
1 基于BoW模型的增强RGB-D SLAM算法
算法的整体流程如图1所示。在前端,采取ORB算法提取图像的特征点,基于BoW模型改进匹配,在保证匹配效果的同时,减少匹配的时间,提高算法的实时性,结合PROSAC算法和透视n点(PnP)算法计算相机的初始位姿变换,利用bundle adjustment(BA)进行非线性优化,得到更精确的相机位姿。通过关键帧筛选方案判断该帧是否成为关键帧。在后端,通过BoW模型[21]对关键帧序列中的每一帧与当前关键帧图像进行相似度得分计算,得分较高的列为闭环候选帧,利用结构一致性对候选帧序列进行回环判定,筛选出真正的闭环帧,将闭环帧作为新的约束加入到位姿图中,增强算法的鲁棒性。利用通用图优化工具g2o对位姿图进行全局优化,得到全局一致的位姿。最后利用全局优化后的位姿和对应的点云数据,采用贪心三角化算法重建出网格地图。

图1 算法流程
1.1 ORB特征提取与基于BoW的图像特征匹配
1.1.1 ORB特征提取
该文选用ORB特征算法进行特征提取。ORB算法采用改进的FAST角点检测方法获取特征点,采用BRIEF特征描述子生成特征描述符。与SIFT和SURF相比,ORB算法在速度上拥有绝对的优势,不需要使用GPU加速,适合在嵌入式设备或缺少GPU运算能力的设备上使用。
1.1.2 基于BoW的图像特征匹配
当两幅图像进行匹配时,如果采用暴力匹配法,将每幅内的每一个特征与另一幅图像内的每一个特征进行匹配,其时间复杂度为O(N2)。而BoW的正向索引存储了图像特征描述子和它们在字典树中关联的节点,这种方式可以极大地缩小图像特征的匹配范围,加快匹配速度。算法步骤如下:
(1)对任意两幅图像I1和I2,提取它们的ORB特征,得到它们的特征点和描述子,即(keypoints1i,descriptors1i)和(keypoints2i,descriptors2i)。其中keypoints1i表示I1的特征点,descriptos1i表示与keypoints1i对应的特征描述子;keypoints2i表示I2的特征点,descriptos2i表示与keypoints2i对应的特征描述子。
(2)对descriptors1i和descriptors2i求其对应的BoW特征向量(node1i,f1ij)和(node2i,f2ij)。其中node1i和node2i表示第l层的节点,f1ij表示以node1i为父节点的特征,f2ij表示以node2i为父节点的特征。
(3)当node1i=node2i时,计算f1ij和f2ij对应的描述子descripto1ij与descriptor2ij之间的汉明距离Dist,设置最小值为bestDist1,次小值为bestDist2。
设定阈值H和h,若满足:
bestDist1 (1) bestDist1 (2) 则认为该匹配是正确的匹配,存入Matches。 最终可得到鲁棒性强的匹配Matches,Matches被用来进行下一步的图像配准和位姿估计。 完成两幅图像的匹配后,可以进行相机位姿的求解。该文使用PROSAC算法与PnP算法结合计算相机的初始位姿,同时认为最邻近匹配的汉明距离越小,匹配点的质量越高。得到相机的初始位姿后,采用BA对初始位姿进行非线性优化,得到精确的位姿,BA问题即求解最小化重投影误差,如式(3)所示。 (3) 其中,(R,t)表示相机位姿,Xi表示空间点的坐标,xi表示该点在像素内的坐标,Φ表示相机内参,ρ表示Huber核函数。 BA将在g2o中采用Levenberg-Marquadt实现。位姿求解与优化的具体算法如下: (1)对Matches中的匹配点按照bestDist1的值从小到大进行排序。 (2)在排序后的点中选取前n个点作为高质量匹配点作为RANSAC算法和PnP算法的输入,求解出相机位姿的变换矩阵(R,t)和内点数Inliers。 (3)将(R,t)代入式(3)求得优化后的相机位姿(R,t)*。 该文使用关键帧进行定位和建图,通过计算帧间相对运动距离来判断该帧是否为关键帧。帧间相对运动距离的计算公式如下: D=t+min(2π-R,R) (4) 其中,(R,t)表示相机位姿。 对当前帧Framecurr,判断该帧是否为关键帧的方法如下所示: (1)判断Inliersi>Inliersmin,如果该式成立,则进行下一步判断,否则舍弃该帧。 (2)将(R,t)*作为初值输入式(4),求得帧间相对运动距离D。 (3)设定阈值Dmin和Dmax,若Dmin 该文引入了冗余关键帧删除机制,有助于地图的构建和提高SLAM算法的鲁棒性。对当前关键帧KeyFramecurr,如果KeyFramecurr上超过90%以上的特征点可以被至少其他3个关键帧检测到时,认为KeyFramecurr为冗余关键帧,将其从关键帧序列里删除。 该文通过BoW模型对关键帧序列进行回环检测,首先计算待检索图像和数据库图像的BoW向量,计算方式如下: (5) 其中,ni和mi分别表示待检索图像和数据库图像中单词i的数目,ωi表示单词i的权重。然后计算待检索图像和数据库图像之间的相似性分数,计算方式如下: (6) 利用式(6)可以计算当前帧Framecurr与旧的关键帧KeyFramei之间的相似度。通过建立关键帧的倒排索引,记录包含特定单词的关键帧。对于新的一帧图像,首先计算该帧图像包含的单词表,对于每一个单词,通过倒排索引查找具有该单词的所有关键帧,同时记录每个关键帧与当前帧的共同单词个数。对那些共同单词个数超过N的关键帧,计算其与当前帧之间的相似性得分Score。设定阈值sTH,若相似度分数Scorei满足: Scorei>sTH×Scoremax (7) 则将 若闭环候选帧序列不为空,对 该文通过位姿图进行全局优化,将每个关键帧的相机位姿作为节点,将两个位姿的变换关系T作为边构建位姿图。这样对于两个有边连接的节点,会存在一个误差: ei,j=xi-T×xj (8) 其中,xi,xj表示i,j节点的估计值。将所有的顶点和边考虑进来,总的误差函数为: (9) 其中,Ωi,j表示边的信息矩阵。这样整个问题被转换为一个最小二乘问题。该文采用g2o中的Levenberg-Marquadt法进行求解。 在相机运动过程中,可能会出现运动丢失的情况。为此,该文加入了重定位功能:当连续M帧图像都出现失配的时候,采用回环检测的方法寻找关键帧序列中与当前帧最为相似的图像,之后通过1.2节的方法建立帧间约束并将当前帧设置为关键帧。 该文选用网格地图来进行稠密地图的构建,其构建算法如下所示: (1)通过滤波对点云进行处理,减少点云数据容量,去除点云数据中的噪声、离群点。 (2)通过重采样对物体表面进行平滑处理和漏洞修复。 (3)计算点云法线,并将点云位姿、颜色、法线信息合并到一起,构建有向点云。 (4)使用贪心投影三角化算法对有向点云进行三角化,构建三角化网格地图。 为了验证算法的有效性,该文利用Sturm等人[23]提供的RGB-D基准包进行实验,该基准包中包含Kinect产生的彩色图像和深度图像序列,以及机器人的真实运动位姿。同时,文献[23]还提供了一个自动评估工具,该工具可以自动计算出真实轨迹与算法估计轨迹之间的均方根误差(RMSE)。该文将从准确性和实时性与文献[19]、文献[24]和文献[25]进行对比。算法的实验平台为:Intel i5 9300H处理器(2.4 GHz),16 GB RAM,64位Ubuntu16.04操作系统。 对Fr1/xyz数据包相邻的两帧图像进行特征匹配。表1为基于BoW模型的特征匹配算法和暴力匹配算法关于Fr1/xyz数据包的特征匹配时间对比,图2所示为BoW匹配的结果。 表1 Fr1/xyz数据包特征匹配时间对比 由表1可知,在ORB算法提取的特征点数量为500,Fr1/xyz数据包共产生787次匹配的情况下,暴力匹配共使用了10.7 s的时间完成匹配,BoW匹配共使用了6.2 s的时间完成匹配,由此可见,BoW匹配可以极大地减少特征匹配的时间。由图2可知,BoW匹配的结果较好,正确匹配数量多。 图2 BoW匹配结果 该文选取了Fr1数据包中的Fr1/xyz、Fr1/rpy、Fr1/desk等9个数据集进行实验。表2为文中算法与文献[19]、文献[24]和文献[25]的均方根误差对比。 表2 文中算法与文献[19]、文献[24]和文献[25]的均方根误差对比 m 由表2可以看出,文中算法在Fr1/xyz、Fr1/rpy、Fr1/desk等6个数据集中的精度均优于文献[19]、文献[24]和文献[25]中提出的算法。仅在Fr1/desk2数据集,文中算法略低于文献[19]和文献[25],但优于文献[24];在Fr1/360数据集,文中算法略低于文献[24]和文献[25];在Fr1/plant数据集,文中算法略低于文献[25],但优于文献[24]。基于相同数据的集性能比较,文献[24]的平均RMSE为0.096 8 m,文献[25]的平均RMSE为0.084 2 m,文中算法的平均RMSE为0.079 7 m,总体精度优于文献[24]和文献[25]。文献[19]在测试数据集的平均RMSE为0.072 8 m,文中算法对应的数据集的平均RMSE为0.066 5 m,总体精度优于文献[19]。根据以上统计结果,验证了文中算法的总体精度优于文献[19]、文献[24]和文献[25],具有更好的准确性。 为了更加直观地显示文中算法的定位准确性,对估计轨迹与真实地面轨迹进行误差量化分析。图3是估计轨迹与真实轨迹的对比图,其中的(a)、(b)、(c)、(d)分别对应了表2的Fr1/xyz、Fr1/desk、Fr1/floor、Fr1/room。表3为误差量化数据,包括最大值max、最小值min、中位数median、均值mean、标准差std。 (a)Fr1/xyz数据集相机轨迹恢复结果 (b)Fr1/desk数据集相机轨迹恢复结果 表3 误差量化指标 m 从图3可以看出,估计轨迹能较好地贴合真实轨迹,全局一致性较好。从表3可以看出在Fr1数据包中,误差值与变化波动都较小,总体误差在可接受范围。 由于文献[25]只进行了特征点的提取,没有进行特征描述符与特征匹配,所以文中只与文献[19]和文献[24]进行速度对比,对比结果如表4所示。 表4 文中算法与文献[19]和文献[24]算法运行速度对比 s 文献[24]处理一帧数据平均需要0.35 s,即平均每秒钟处理约3帧数据,文献[19]处理一帧数据平均需要0.11 s,即每秒钟处理约10帧数据,而文中算法处理一帧数据平均用时为0.04 s,即每秒钟处理约25帧数据,是文献[24]的8倍,文献[19]的2.5倍。由于Kinect的帧率为30 Hz,因此文中算法基本满足实时性要求。 该文选用了Fr1/xyz、Fr1/desk和Fr1/floor数据包进行建图分析。图4的(a)、(b)和(c)分别表示使用Fr1/xyz、Fr1/desk和Fr1/floor数据包构建的三维网格地图。 (a)Fr1/xyz数据集重建结果 Fr1/xyz和Fr1/desk是办公室场景,为手持Kinect拍摄所得。由图4(a)和(b)可以看到,该场景内的办公桌、电脑、书籍和墙壁等都得到了很好的重建。图中的空洞部分是由于拍摄过程中没有扫描到那部分。Fr1/floor数据包由机器人携带Kinect拍摄所得。由图4(c)可以看到,整个场景得到了完整的重建。 该文提出了一种改进的RGB-D SLAM算法来进行即时定位与地图构建。在SLAM前端,该文采用ORB特征提取算法来进行特征点的提取,使其可以运行在嵌入式设备和缺乏GPU的设备上;采用BoW模型改进了匹配方法,极大地减少了匹配所需要的时间,提高了算法的实时性;利用PROSAC算法结合PnP算法计算相机位姿,提高了精度的同时也节省了时间,并且利用非线性优化进一步提高了位姿的精度;在传统的关键帧选取方法上加入了冗余关键帧删除机制,便于关键帧的管理和维护。在SLAM后端,该文采用了BoW模型进行闭环检测,利用结构一致性提高了闭环的准确率,增强了算法的鲁棒性;通过通用图优化工具g2o对位姿图进行优化,得到了全局一致的位姿。该文采用贪心三角化算法来构建三维网格地图。最后,该文选取TUM数据集里的Fr1数据包进行实验,并通过与文献[19]、文献[24]和文献[25]进行了实时性和准确性的对比,表明了该算法的优越性。在下一步的工作中,将会结合IMU(惯性测量单元)等高精度设备更进一步优化相机位姿,利用深度学习方法提取语义信息,构建语义SLAM。1.2 位姿求解与优化
1.3 关键帧选择
1.4 回环检测
1.5 全局优化与地图构建
2 实验结果与分析
2.1 特征匹配结果分析


2.2 定位误差对比
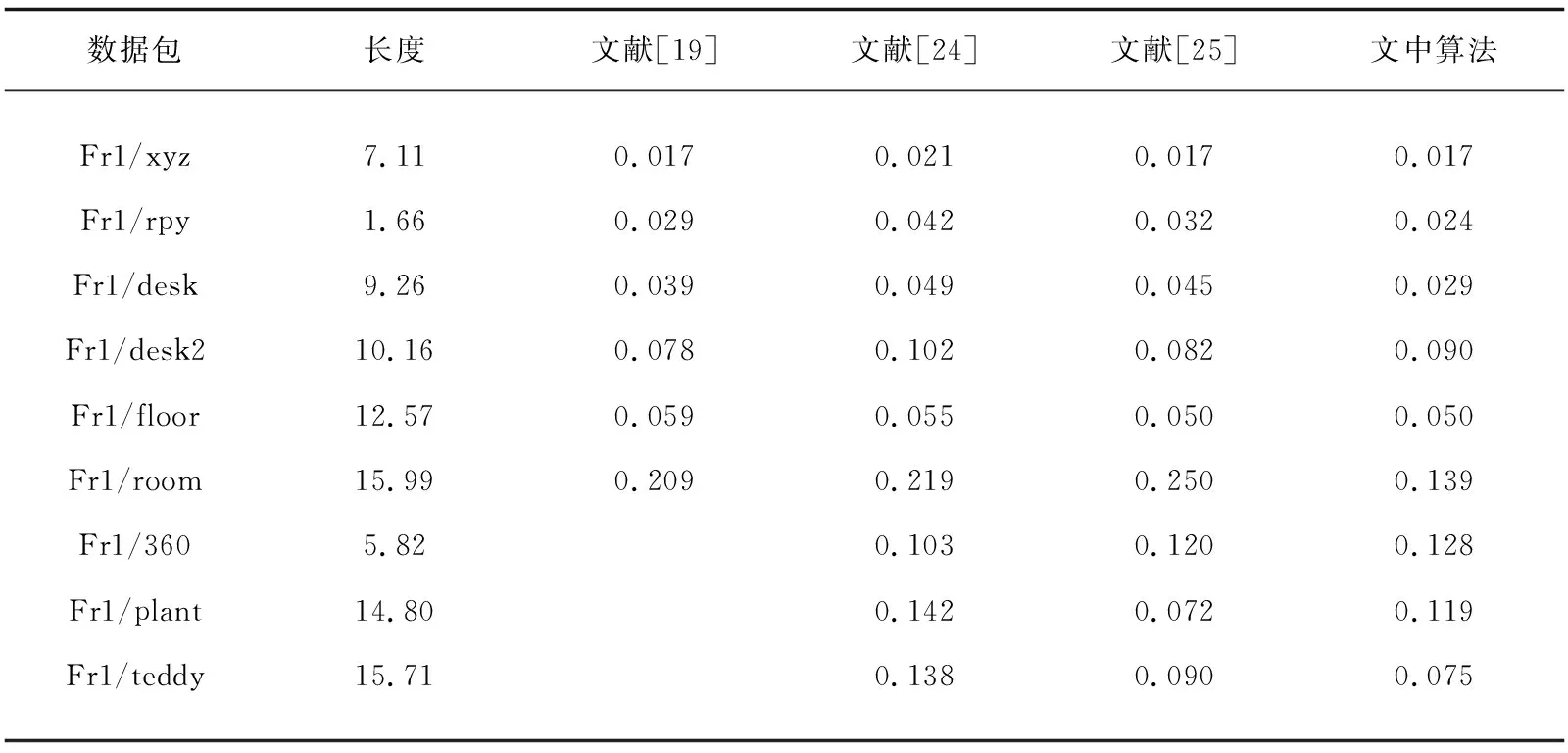

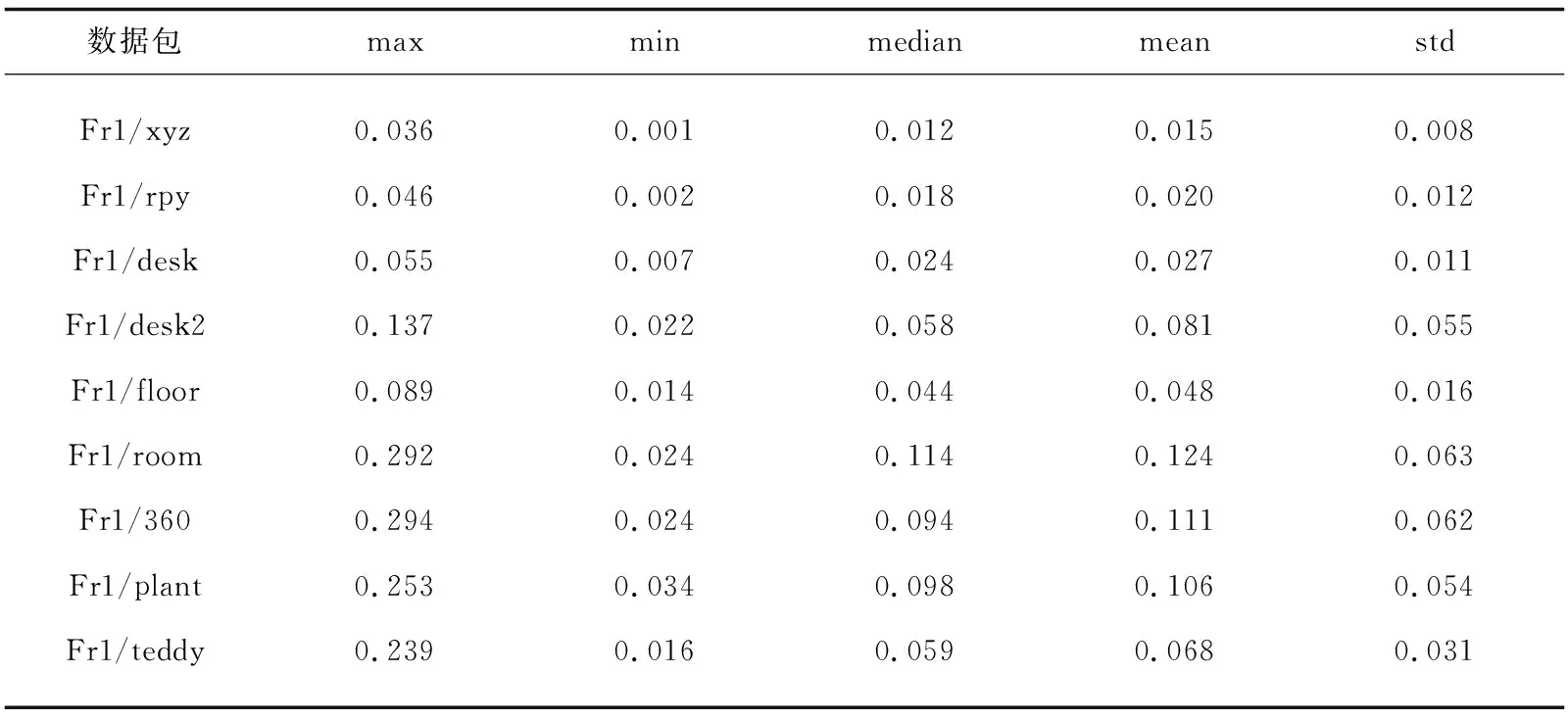
2.3 运行速度对比

2.4 地图构建评估

3 结束语
猜你喜欢
现代计算机(2022年4期)2022-04-24计算机与数字工程(2022年3期)2022-04-07中国科技纵横(2020年13期)2020-12-11现代信息科技(2020年22期)2020-06-24山东工业技术(2019年16期)2019-07-19物联网技术(2018年8期)2018-12-06软件导刊(2018年4期)2018-05-15电脑知识与技术(2017年3期)2017-03-27现代电子技术(2016年24期)2017-01-19中国新通信(2016年2期)2016-03-11