特种陶瓷渣浆泵自动翻转装配平台的设计
2021-05-05 13:41申兆亮朱景红蒋新启
农业装备与车辆工程 2021年4期
申兆亮,朱景红,蒋新启
(250100 山东省 济南市 山东省农业机械科学研究院)
0 引言
随着中国经济转型升级,越来越多的企业开始重视自动化在车间生产中的应用。南方某特种陶瓷泵厂为了解决泵体(质量约1.5 t,外形为直径1.5 m 类圆形)在装配中仍以行车吊装翻转[1]存在的效率及安全系数双低的问题,提出了一种自动化翻转装配平台的解决方案,极大提高了生产效率,并填补了国内空白。
1 研究现状
以美国、德国、日本为首的翻转机生产研发水平已经相当成熟。美国 Bushman 设备公司是当前全球最大、种类最齐全的翻转机制造商,其产品涉及 L 型液压翻转机、CL 型翻转机、O 型翻转机、头尾架式翻转机等常见类型的产品,工作能力从 0.1~120.0 t 不等,以 90°翻转机居多,180°翻转的机型较为稀少[2]。
国内针对大型翻转机的研究主要集中在单功能翻转机。所谓单功能翻转机是仅能实现工件的90 °或者 180 °翻转的设备。郭景坤[3]等设计了一种 L 型下拉式翻转机;燕山大学赵永生[2]教授团队在翻转机变位调姿理论研究方面成绩显著。当前国内翻转机的研发领域通常根据工况需求“单次设计”,没有形成统一的行业生产标准,适用范围较为单一,检修较为困难,用于泵行业的翻转机更是寥寥无几,为此,本文重新设计了适用于蜗牛壳泵组装的自动化翻转机。
2 系统简介
本系统共分为机械及控制两部分,其中机械部分主要由运送小车及单悬臂装配平台组成。控制系统主要由PLC[4]及具有触摸功能的上位机组成。系统的操作可实现无线遥控、柜体按钮操作及自动操作3 种操作的任意一种,可根据现场人员的不同需求灵活适配。
3 机械系统简介
3.1 运送小车
运送小车负责将需要装配的泵壳运送至单悬臂下及装配完成后将整套泵壳运送至初始位置,具体见图1 所示。
3.2 单悬臂装配平台
单悬臂装配平台是整套系统的核心结构,通过支撑体可以使单悬臂具备上下移动、正反翻转、前后伸缩以及旋转盘无限制地正反旋转等8 个自由度的运动,满足蜗牛壳泵装配过程中灵活需求。升降立柱 升降装置 回转驱动器 支撑臂 风炮支架
4 控制系统
4.1 装配工艺控制需求
本装配平台共完成装泵壳及卸泵壳2 个工序。其中,装泵壳主要是依靠单悬臂将小车运送过来的下泵壳抓取上升并翻转180°,然后下降至最低位置,等待陶瓷蜗壳及上泵壳的装配,其流程见图3。

图3 装泵壳流程图Fig.3 Flow chart of pump casing installation
装泵壳简述就是抓取下泵壳等待装配的工序。其状态如图4 所示。

图4 抓取下泵壳待装配状态图Fig.4 State diagram of grabbing lower pump shell to be assembled
卸泵壳是将装配完成的泵体总成上升至最高位置,并反旋转180°然后下降至小车的表面并将泵壳释放,再由小车将装配好的泵壳运送至初始位置(状态如图5 所示),其流程见图6。

图5 装配完毕的陶瓷泵体Fig.5 Assembled ceramic pump body

图6 卸泵壳流程图Fig.6 Flow chart of discharge pump shell
4.2 单臂翻转装配平台智能控制系统原理
智能控制系统离不开遍布于机体上的传感器[5],只有将各机构运动的状态通过传感器实时反馈给上位机,整个系统才能有条不紊地工作,其控制系统原理如图7 所示。
PLC 是整个控制系统的神经中枢,采用了西门子Smart200PLC,所有传感器采集的信号均为数字量信号,使控制系统更为简单,寿命更长。对于控制精度比较高的物理量,如单臂旋转盘初始角度定位控制,则结合变频器,采用2 组传感器接力控制方式,避免了因泵体转动惯量较大,造成刹车抖动及停车不到位情况的出现。整个控制过程完全依照图3 或图6 的装配流程工作,控制信号触发后进入下一步的工序,依次自动完成。

图7 控制系统原理图Fig.7 Schematic diagram of control system
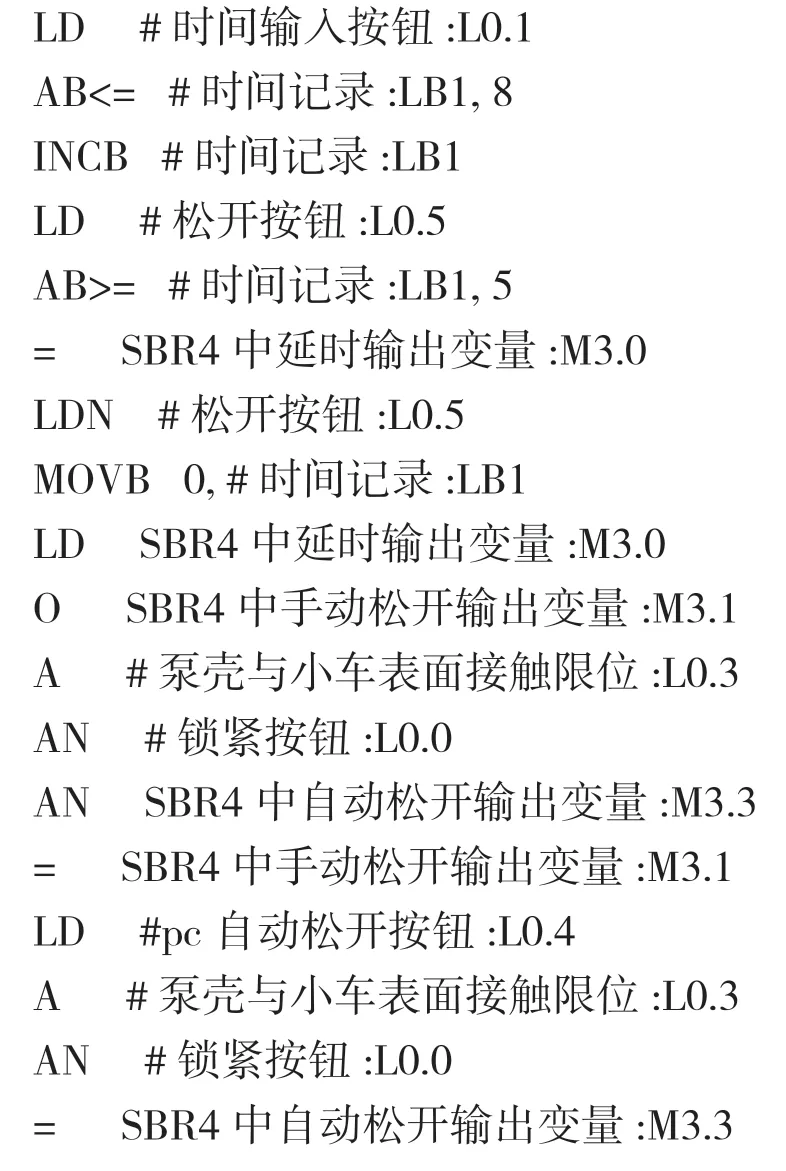
在整个系统运行过程中,最容易出现的安全事故是单臂将泵壳抓取后,锁紧滑块突然缩回,造成泵壳坠落砸伤人员情况,所以,无线遥控及柜体按钮的泵壳松开按钮成为整个控制系统的短板,为了避免操作人员勿操作加入了延时功能,只有长按5 s 后,锁紧滑块才会缩回将泵壳松开。部分PLC 控制代码如下:

为了能实时显示系统的运行状态及实现自动化运行,上位机采用了C#[6]语言编写的人机界面,如图8 所示。

图8 人机界面Fig.8 Human-machine interface diagram
人机界面主要分为系统运行状态显示区及按钮操作区2 部分。系统运行状态显示区主要将系统各机构运行的实时状态显示出来,方便操作人员进行手动操作,及设备出现故障时,方便维修人员及时查找到故障点;操作区主要实现系统自动化运行的操作,在自动化运行过程中,如果操作人员想停止自动化过程,可按无线遥控或者柜体按钮的任意键。部分程序代码如下:


图9 是某企业正在运用的翻转机样机。

图9 样机照片Fig.9 Photos of prototype
5 总结
特种陶瓷渣浆泵自动翻转装配平台解决了泵厂急需的大型自动化设备,自投入使用以来运行良好,得到厂家的一致好评。下一步将根据泵型号需求充实不同的翻转机型号。
猜你喜欢
建材发展导向(2021年13期)2021-07-28
电子乐园·下旬刊(2021年3期)2021-02-08
房地产导刊(2020年8期)2020-09-11
中国外汇(2019年13期)2019-10-10
汽车文摘(2019年3期)2019-03-04
重庆与世界(2017年8期)2017-11-24
电子技术与软件工程(2017年19期)2017-11-09
故事林(2017年19期)2017-10-17
三联生活周刊(2017年1期)2017-01-11
山东工业技术(2016年15期)2016-12-01