
无刷电机PWM调速系统设计
2021-04-30 07:25杨馥华康婷霞
电子设计工程 2021年7期
杨馥华,康婷霞
(惠州市技师学院电子工程系,广东惠州 516003)
随着电力电子、电机控制理论、永磁材料技术的更新,无刷电机得到了快速发展。无刷电机去掉了传统电机电刷的滑动接触部分和转子绕组部分,具有体积小、故障率低、低噪声、无火花、效率高的优点,其具有优良的起动、调速、制动性能,在家用电器、工业控制、机器人等对控制精度要求高的场合,得到了普遍应用。特别是一些精密的机床设备,机械手臂等工控设备,不仅对控制精度要求高,对电机转速的平稳过度提出了更高的要求,无刷电机可以实现设备的精密加工,提高产品质量的同时可以延长设备寿命[1]。
PWM(脉冲宽度调整技术)是最常用的直流调速技术,利用单片机的定时器产生的精准脉冲信号,经分频和运放后,通过控制功率场效应管的导通和关断来调整输出直流电压的脉冲宽度,使输出的电压成为一系列幅值相同的、可调的电脉冲信号,实现电压的精准控制,来满足电机的调速需求。
在调速系统中,开环系统对于稳定性要求高、响应快的场合,常常难以达到要求。文中设计的双闭环调速系统通过对电机的反电动势、电流进行采样,通过反电动势来确定电机的速度,通过检测驱动电流确定电机功率,使单片机获得当前的电机运行参数,进行PID 运算,实现参数的自动修正。双闭环系统响应速度快,在上下坡、有无负载情况下都能够对电机进行精准的速度控制[2]。
1 硬件电路设计
1.1 系统工作原理
该调速系统采用ST 系列单片机,利用定时器产生PWM 信号,采集电机的驱动电流、电机端的反电动势,进行PID 运算,构成反馈系统。根据运算结果,调整PWM 信号,通过图腾柱电路将单片机的控制信号放大、分隔,使其有足够的功率来开通或者关断MOS 管,以获得准确的控制信号,稳定地调节电机电压,控制转速。该系统驱动的电机额定电压为18 V,额定电流为4.5 A[3]。
1.2 硬件电路的组成
由于系统输入的是频率为1~20 kHz,幅值为18 V的交流电,为了保证系统电源的稳定性以及可靠性,需要通过整流桥整流,使整个系统取得直流电压。通过整流电路后的电压幅值可达到22 V,而且变化较大,不能用于对整个系统的MCU 和部分芯片提供电源。因此再对整流后的电压进行整流降压,使其稳定在5 V。此处降压之后压差较大,因此采用DC-DC 降压方式,可使降压之后的功率损耗小。基于MP2359开关频率高、损耗功率小、输出电压纹波小、输出电流大、体积小的优点,选取MP2359作为开关整流电路。MP2359输入电压可达4.5~24 V,开关频率可达1.4 MHz,输出电压可达0.81~15 V,输出电流最大值可达1.2 A,效率高达92%[4]。开关整流电路如图1所示。

图1 开关整流电路
系统输入电压稳定在5 V,单片机工作电压为3.3 V,所以,需提供一个噪音小、静电电流低的降压芯片。由于降压后压差较小,文中采用线性降压电路,LDO 芯片稳定性好、负载响应快、输出纹波小。所以,采取XC6206P332MR 芯片把5 V 电压降压到3.3 V。此芯片电路应用简单,工作稳定可靠,功耗较低,输出电流可达200 mA[5]。LDO 电路如图2 所示。

图2 LDO电路
功率驱动选用H 桥电路,H 的桥臂采用MOS管。利用两个N 沟道MOS 管和两个P 沟道MOS 管,为了使该控制电路更简易,此处采用ECH8660 芯片作为电机的驱动电路,ECH8660 为复合MOS 芯片,里面集成了一个PMOS 和NMOS 的双MOS 芯片[6]。MOS 驱动电路如图3 所示。
在不同时刻,电流经过MOS 芯片接入电机的两端,不停地产生电磁力,推动电机转子产生大小、方向不同的电磁力,推动转子旋转。通过切换H 桥电路的4 个栅极(G 极)的高低电平状态,实现电机的正反转,控制栅极的开关频率,进而控制电机的驱动电压,实现电机的调速。在任意时刻,对于H 桥电路中,只能控制其中一个PMOS 和另外一个NMOS 开通,否则会造成MOS 的“短路”,烧毁MOS芯片或者其他器件。为了防止MOS 的“短路”和意外短路(如气候干燥的时候人体静电接触),需要在程序中设置死区时间,同时在GS 极之间加二极管保护电路。因此在此控制方式中,在控制PMOS 的栅极前端加一个图腾式驱动电路来加快PMOS 的开关响应,增加电机驱动的可靠性和安全性[7-8]。

图3 MOS驱动电路
当MOS 管关断时,电机线圈可能会给造成MOS管的DC 击穿,因此,选取的PMOS 需要在内部集成一个二极管,该系统选取ECH8660 芯片,该芯片在GS 极之间集成了一个稳压二极管,可以实现静电保护,防止MOS 意外击穿。
由于驱动MOS 开断需要高频率以达到减小噪音的目的,因此需要对MOS 的G 极进行高速开断。在电压一定的情况下,需要给MOS 的DS 之间尽可能地提供一个大电流,使MOS 快速开断,因此,该文为MOS 的驱动增加了图腾柱方式来获得一个大的电流驱动,加快MOS 管的响应速度,减小死区时间。图4为PMOS 的驱动电路,MOS 管是压控元件,需要提供给栅极一个足够高的电压,而单片机输出的电压不足以控制该MOS 的栅极开关,通过增大驱动电流来控制MOS 开断,此处使用图腾柱电路来放大PWM 控制信号是非常合适[9]的。图腾柱驱动电路如图4所示。
电机的驱动功率为当前输入电压乘以当前输入电流,而当前的驱动电压可以通过PWM 的输出频率以及占空比的运算获得。在电流检测电路中,采集驱动电流的大小,由于分流后的电流太小,需要加一个运放放大后送入单片机采样,根据此电流判断当前的驱动电流大小,实现当前电机的功率检测。如果检测到功率异常,则单片机会立即关断MOS 的栅极以保护电路板的安全,此电路也可以作为过流保护器使用[10-11]。图5 为功率检测电路图。
2 控制程序设计

图4 图腾柱驱动电路
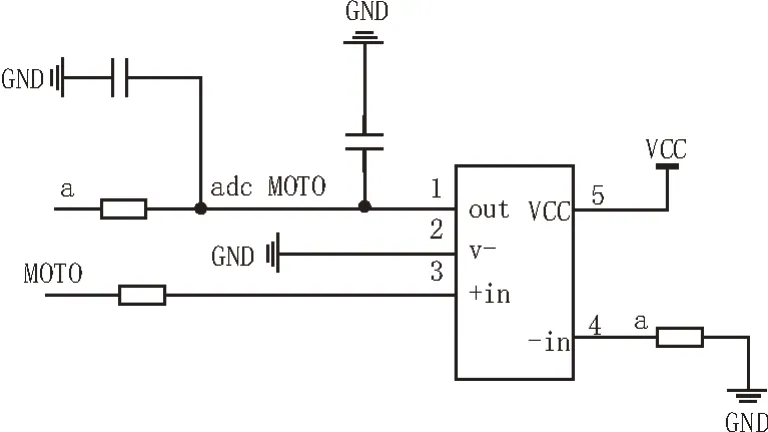
图5 功率检测电路
该文整体控制思路为:在电路板上电复位后,先等待控制器发来一个指令,校验指令是否正确,如果不正确,则继续等待指令;如果正确,则解码指令里面的速度和方向指令,并且按照接受到的速度指令输出满足需求的PWM 信号,控制电机启动。同时开启检测指令,来检测功率和速度。如果加入负载或者遇到上坡,检测到的速度和原来的有偏差,则将该偏差送入单片机进行PID 运算,在很短的时间内再次调节到当前速度,由此构成一个闭环控制系统。如果检测到当前速度与原速度一致,则不更改PWM 的输出占空比(即按照当前速度继续运行),使电机始终工作在恒定速度[12-13]。程序流程图如图6 所示。

图6 控制程序流程图
电机端的反电动势作为速度环的反馈信号采集,反馈值在单片机中做PID 计算,根据计算结果,调整PWM 的输出波形,输出当前指令速度的PWM信号,使电机始终处于当前控制指令中的速度。在控制电机加减速的过程中,需要注意加减速曲线的平滑,否则会造成电机的控制不平稳,甚至造成设备的损坏。如果加减速曲线调节的足够光滑,电机速度的变化会非常稳定,不会使设备或者其他电机驱动的装置发生震颤。
2.1 无刷电机数学模型
无刷电机和传统直流电机的运行特性基本相同,他励直流电机电枢回路电压平衡方程如下[14]:
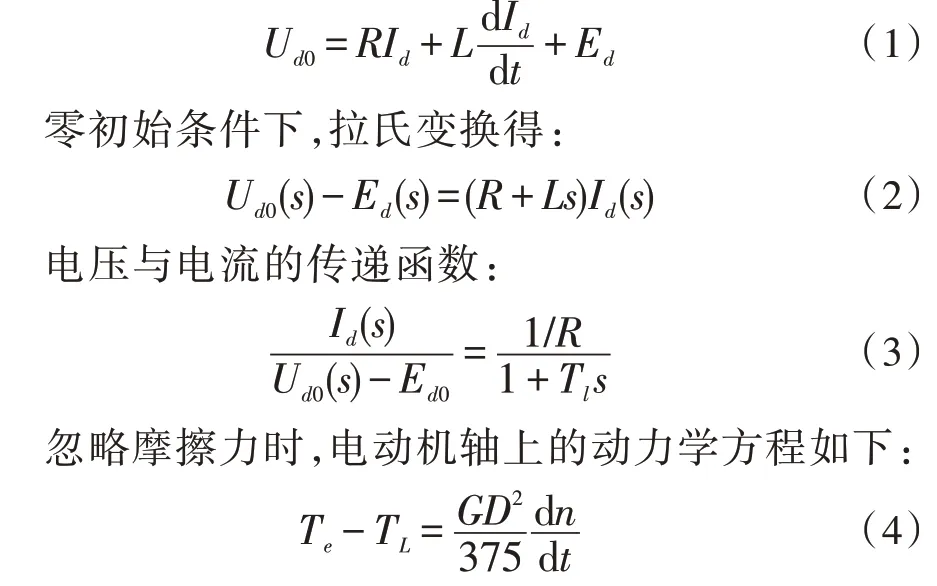
式中,额定励磁下的负载转矩、电磁转矩以及转速和反电动势之间的关系为:


2.2 单片机实现PID算法
该次仿真的目的是使直流电动机产生的功率适应负载的变化(例如当用电机驱动负载上下坡行驶时)。系统通过测量电动机的速度和功率,当检测到功率不变,速度减慢,而速度指令却依旧还是未变时,可判断出当前为负载加大状态,需要加大功率来达到稳定当前速度的效果,按照这种方式构成一个速度恒定的过程调节,对电动机的变化做出反应[15-17]。以下为PID 部分程序:


3 实验分析
获取电机转速有两种常用方式:一种是直接采集电机转速,在电机端装载光电编码器或者霍尔传感器,通过采集传感器发出的脉冲信号,直接获取当前的转速;另一种是间接采集电机转速,检测电机反电动势,通过反电动势的变化计算电机的速度变化。
为了提高系统的可靠性,通过采集反电动势实现速度检测,如果需要精密速度控制,则要把反电动势与电机的各项指标结合起来。由于反电动势信号不是一个平滑的信号,因此在采集到反电动势后需要进行数字滤波处理,得到的仿真结果如图7 所示。在电动机恒速运行,电机起动后,0.06 s 时刻负载增加,同时反电动势变化,通过采集反电动势信号,控制系统调节电机的驱动电压使得电机再次达到速度的设定值。从实验曲线可以看出,超调量小于4 %,调节时间为50 ms 左右,稳态误差小于3%。该控制系统具有良好的快速性和准确性。
4 结束语

图7 仿真结果
无刷电机的反电动势反馈,对于低速、恒定运行和无法接入编码器的情况来说非常实用。反电动势可直接采集得到,虽然转换成电动机转速过程需要计算,但是节省了安装光电编码器的空间,并且大大节省了传感器的成本,提高了系统的可靠性,尤其在空间狭小、传感器容易发生故障的场合,比如在电机处在浸没的环境中(如压缩机或泵)。测试表明,按照此类硬件设计和程序控制,系统能够满足电机的运行调速要求,电机产生的功率能够适应负载的变化,实现电机的恒速运转,速度切换过程中,可以实现速度的平滑调节(在各级速度调节之间无抖动),响应速度快,控制准确度高。
猜你喜欢
环球时报(2022-09-29)2022-09-29
郑州大学学报(工学版)(2020年2期)2020-06-16
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
汽车电器(2019年2期)2019-03-22
湖北工业大学学报(2016年5期)2016-02-27
电子设计工程(2015年15期)2015-02-27
河南科技(2014年10期)2014-02-27
电气传动(2010年1期)2010-08-15
