
基于点云数据的髋臼置钉通道全局优化
2021-04-27 09:57:20周先阳彭弘哲李必文通信作者谭文甫
医疗装备 2021年7期
周先阳,彭弘哲,李必文(通信作者),谭文甫
1 南华大学机械工程学院 (湖南衡阳 421001);2 南华大学附属第二医院 (湖南衡阳 421001)
借助于计算机辅助设计(computer aided design,CAD)技术科学、精确、高效地规划髋臼置钉通道并将其作为曲面定位型置钉瞄准器的设计依据,可促使经内固定术的骨折髋臼重新获得负重部位的解剖复位和可靠固定[1]。为避免螺钉偏置导致的损伤及并发症,保证最大限度地改善或恢复髋臼的生物力学性能,必须实现置钉通道总长的全局优化[2]。本研究针对现行多截面调控规划法的不足,研究了基于点云数据的髋臼置钉通道规划方法,真正实现了对置钉通道总长的全局优化。
1 现行多截面调控规划法及其不足
1.1 规划步骤
王林超等[3]和李杰等[4]分别提供了髋臼前柱、后柱置钉通道的多截面调控规划法,先调控规划出前后柱的最大内接圆柱体,再向内偏移出同轴圆柱体作为置钉通道的安全范围。获取后柱最大内接圆柱体的步骤如下:(1)依据手术区域目标髋骨的螺旋CT 检查数据重建骨骼3D 模型,通过髋臼窝中心并沿髂耻线的平行方向去除前柱,得到只含后柱区域的3D 模型,见图1a;(2)以3D 模型中心点点集创建骨骼干轴的最小二乘直线,作为后柱最大内接圆柱体的轴线方向,见图1b;(3)寻找通过髋臼窝中心点的正截面,并以其为起始面,向两端各偏移5个等距正截面,得到11个截面的外轮廓线,见图1c;(4)将11个外轮廓线沿轴线方向投影至最靠近坐骨的外侧正截面上,寻找并做出封闭区间的最大内切圆,其沿轴线拉伸出的圆柱体即为后柱的最大内接圆柱体,见图1d。以上方法步骤同样用于获取前柱的最大内接圆柱体。综合考虑皮质骨厚度、瞄准器的设计制造误差以及使用时的钻孔偏距,以此作为半径偏移量,向内做出最大内接圆柱体的同轴圆柱体,即可确定安全置钉通道的范围。
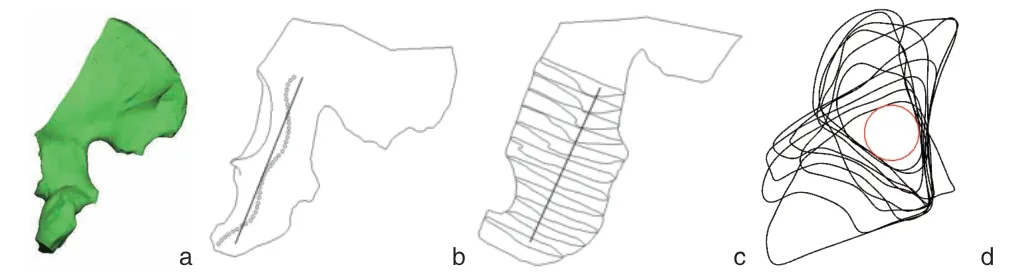
图 1 多截面调控规划法确定置钉通道安全范围的步骤
1.2 不足
(1)寻找通过髋臼窝中心点的正截面的过程比较费时费力,是通过不断调控初始阶段n 个正截面的数量及位置,直至设计者直观判断该截面已经出现;(2)难以实现总长的全局优化,因该法难以量化判断上述截面一定通过了髋臼窝中心点,且由于个性化差异,通过髋臼窝中心点的正截面在总长上不一定是最峡部;(3)寻找封闭区间最大内切圆也是通过不断调控、比对的过程实现的,效率低下且该内切圆不一定真正最大。因此,我们认为多截面调控规划法比较适用于形态近似双曲面的脊柱椎弓根的置钉通道规划,而不太适用于形态复杂、表面凹凸不平的髋臼前后柱置钉通道的规划。基于大密度点云的数据进行髋臼置钉通道的规划,应能克服多截面调控规划法的上述不足,实现对置钉通道总长的全局优化。
2 基于点云数据的髋臼置钉通道规划方法
2.1 规划步骤
以获取髋臼前柱最大内接圆柱体为例进行说明:(1)在Mimics软件中获取只含前柱区域的3D模型及其中心点点集,将3D模型保存为stl格式,将中心点点集保存为igs格式,见图2a;(2)在Imageware软件中导入中心点点集,创建前柱干轴最小二乘直线,作为最大内接圆柱体的轴线方向,保存为igs格式,见图2b;(3)在UG NX12.0软件中导入3D模型及前柱干轴最小二乘直线,观察未经修正的进出钉点,见图2c;(4)在进钉点与髋臼窝上沿之间、出钉点上方附近分别创建最小二乘直线的垂直平面,规划出置钉通道总长,修剪出该范围内的3D模型,保存为stl格式,见图2d;(5)在Imageware软件中导入文件,以分散点的形式显示3D模型,为保证模型精度,将采样点间隔和扫描线间隔均设置为1,由此得到最大密度的3D模型点云[5],导入步骤(2)的文件后,保存为igs格式,见图2e;(6)在UG软件中导入文件,运用移动对象命令使最小二乘线与绝对坐标系Z轴重合且下端点位于原点,使用曲线投影命令将点云投影在XOY面上,见图2f;(7)根据UG内置功能,将投影点云处理为焊点云[6],提取其在XOY平面上的坐标值,保存为txt文件,见图2g;(8)在MATLAB软件中运行自编的“离散点云读取与边缘提取”M文件,读取txt文件,生成点云轮廓图,见图2h;(9)运行自编的“点提取与光滑曲线拟合”M文件,通过执行ginput命令,顺序提取内轮廓点集上设定数量的特征点,通过调用曲线平滑函数spcrv,自动拟合出光滑封闭的内轮廓线,再运行自编的“像素化处理与最大内切圆绘制”M文件,通过执行imread命令,对轮廓内部的区域进行离散像素化处理,通过遍历所有像素点对应的最大内切圆直径,自动提取最大值作为内轮廓最大内切圆直径并作图,见图2i;(10)运行自编的“三点圆计算”M文件,得到并显示内轮廓最大内切圆圆心坐标以及半径值,见图2j;(11)返回UG,以既定的轴线方向及获取的圆心坐标和半径值,拉伸出髋臼前柱最大内接圆柱体。获取髋臼前柱最大内接圆柱体后,进出钉点的位置也相应得到了修正,再以合理半径偏移量向内做出其同轴圆柱体,即得到髋臼前柱置钉通道的安全范围。
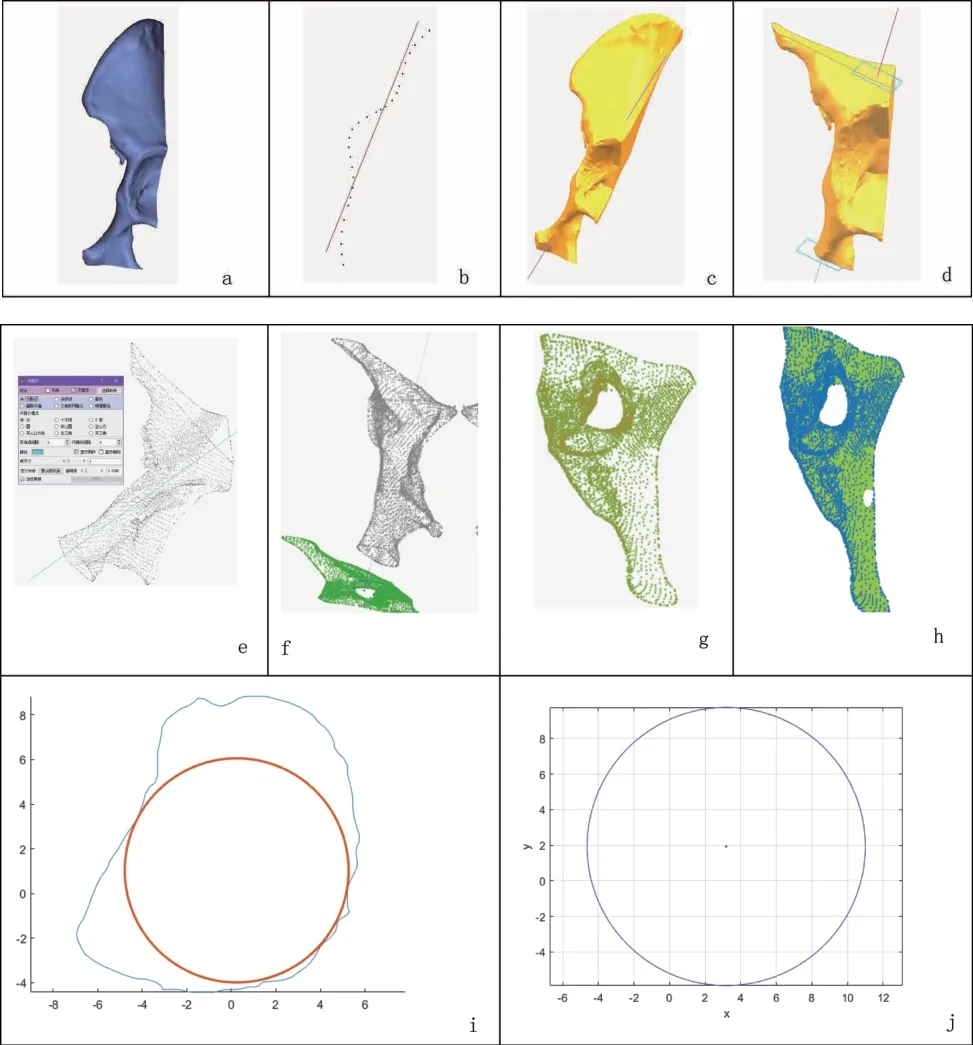
图2 基于点云数据的髋臼前柱最大内接圆柱体获取步骤
2.2 相关原理与操作技巧
(1)2.1中步骤(4)将置钉通道总长起点初步规划在进钉点与髋臼窝上沿之间,既保证了髋臼窝置钉不破壁,也避免了过多的骨翼面点云数据引入对生成封闭内轮廓形态及效率的不利影响;(2)使用UG软件,既是为了应用其三维造型设计功能,更是为了利用其特有的提取点云坐标值的功能,为后续在MATLAB软件中生成点云轮廓图提供支撑;(3)2.1中步骤(8)“离散点云读取与边缘提取”M文件是基于包络圆检测边缘轮廓点的方法生成点云轮廓图,调用了点构建多边形的alphaShape函数[7],根据经验将shp=alphaShape(x,y,alp)的alp包络圆半径值设置为2.02即可满足点云密度与分布前提下的轮廓形态与精度要求;(4)2.1中步骤(9)“点提取与光滑曲线拟合”M文件调用了spcrv函数来保证内轮廓曲线拟合的光滑性,以避免折线拟合给内轮廓最大内切圆获取带来不便,以及给通道规划的合理性带来误判;(5)2.1中步骤(9)“像素化处理与最大内切圆绘制”M文件是为了将折线拟合的alpha shape内轮廓内部区域先进行离散像素化处理,求得每个像素点到轮廓每条线段的有效距离,再比对得到最大内切圆直径,程序采用了二分法以使凹凸相间的轮廓也能被有效判别。
3 全局优化效果验证
3.1 3种前柱最大内接圆柱体虚拟置钉实验
为直观检验基于点云数据全局优化置钉通道总长的效果,采用基于点云数据、基于多截面(7截面、11截面)调控规划法获取的髋臼前柱最大内接圆柱体进行虚拟置钉实验,为进一步阐述实验结果的形成机理,还需比对各封闭轮廓的形态及其最大内切圆的参数。虚拟置钉实验效果及置钉参数见表1。
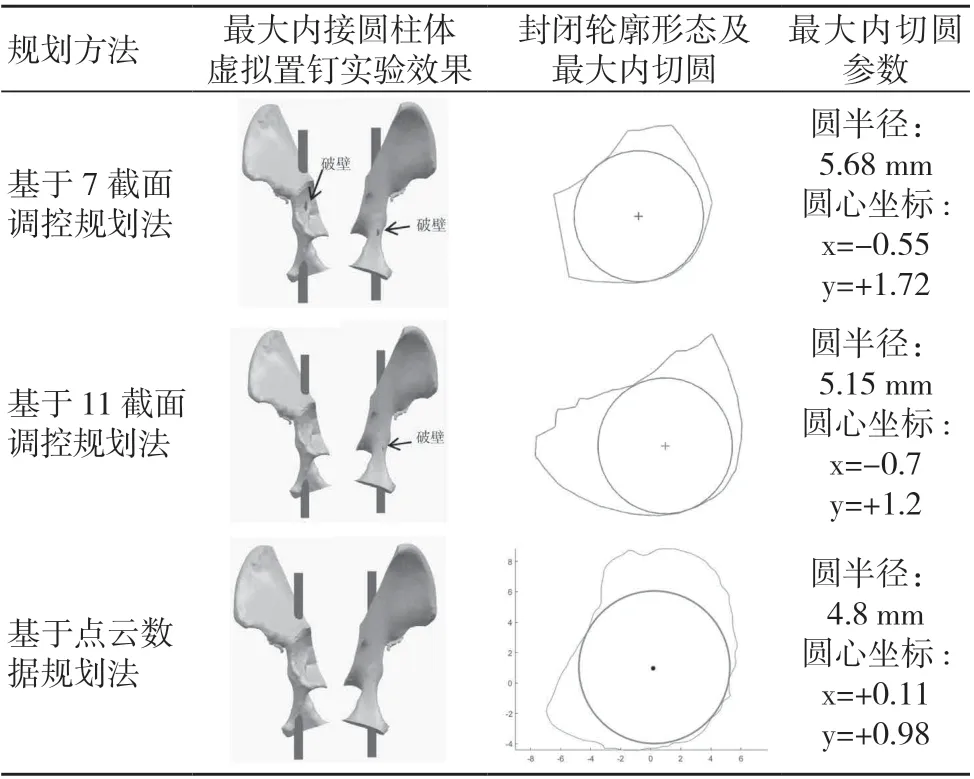
表1 3种前柱最大内接圆柱体虚拟置钉实验效果及置钉参数
3.2 实验结果的机理分析
对3种虚拟置钉实验结果的形成机理分析如下:(1)基于点云数据规划法优于基于多截面调控规划法,因无论是基于7截面还是11截面进行调控规划,其髋臼前柱最大内接圆柱体在虚拟置钉实验中均出现了破壁现象,这表明尽管基于点云数据规划得到的前柱最大内接圆柱体直径较小,但能科学、精确地保证置钉通道的安全性,实验结果证明了全局优化的基于点云数据规划置钉通道方法的先进性;(2)从封闭轮廓的形态上比较,发现基于点云数据形成的封闭轮廓精细且光滑,而基于多截面形成的封闭轮廓是由离散的各截面外轮廓线投影后叠加再修剪形成的,平行于髂耻线的截面使封闭轮廓线条出现拉直现象,且廓形棱角较多,形态失真;(3)虽然基于11截面的前柱最大内接圆柱体直径比7截面的小,但仔细比对两者的封闭轮廓形态,发现一个超出思维定势的现象,11截面虽然在图中中部框定的区域较窄(其最大内切圆半径较小),但在左下方和右上方却框定出更大的区域,分析这是因为置钉通道总长范围内的3D 模型是一个不规则的几何体,表面凹凸不平且干形有弯曲和扭曲,由于截面分布的位置不同,11个截面虽然有可能在廓形中部有更多线条的约束使得区域较窄,但7个截面却有可能截到范围更小的区域,这说明基于多截面调控规划法获得的封闭轮廓及其最大内切圆的大小具有很大的不确定性,调控的有效性需进一步商榷,但过度增加截面数量以追求优化显然会影响设计效率;(4)基于多截面调控规划法进行虚拟置钉产生的破壁现象,进一步验证了难以量化判断调控寻找出的通过髋臼窝中心点正截面的准确性,该截面在总长上不一定是最峡部,以该截面作为等距正截面的起始面缺乏充分依据。
4 结语
基于大密度点云数据的置钉通道规划方法,无需通过反复调控的手段寻找手术区域目标骨骼干轴的峡部和内轮廓最大内切圆即可实现对置钉通道总长的全局优化,特别适用于形态复杂、表面凹凸不平、干形有弯曲和扭曲的髋臼前后柱置钉通道的精确高效规划。虚拟置钉实验结果表明了本研究基于点云数据的置钉通道规划方法、基于MATLAB 自编程序的有效性,为髋臼骨折内固定术的精准医疗、保障医疗安全提供了可靠的理论和手段支撑。
猜你喜欢
临床骨科杂志(2021年1期)2021-03-08 01:32:20
云南化工(2020年11期)2021-01-14 00:50:58
中国微创外科杂志(2020年3期)2020-03-30 08:47:28
江苏农业科学(2017年19期)2017-11-22 19:27:39
创伤外科杂志(2017年4期)2017-03-25 08:47:01
汽车文摘(2016年1期)2016-12-10 13:26:39
现代城市轨道交通(2016年1期)2016-08-24 02:55:13
电力自动化设备(2013年11期)2013-09-18 02:55:04
交通建设与管理(2013年7期)2013-04-20 03:14:44
温州医科大学学报(2010年1期)2010-08-21 06:40:48
