
发明解读 电动扳手控制方法及装置
2021-04-27 07:58
电动工具 2021年2期
授权公告号:CN108459519B
授权公告日:2021.04.06
专利权人:苏州宝时得电动工具有限公司
发明人:胡佳娟; 张宝全; 张传兵
电动扳手是以电源或电池为动力的扳手,是一种拧紧高强度螺栓的工具,又叫高强螺栓枪,主要分为冲击扳手、扭剪扳手、定扭矩扳手、转角扳手、角向扳手。
在利用电动扳手拧松紧固件时,如果在紧固件被拧松之后,电动扳手仍然持续运行,极易发生因持续旋转而导致的紧固件掉落、卡入套筒等情况,进而可能发生因紧固件高空坠落而伤人的事故。因此,如何能够提高电动扳手停机的可靠性是亟待解决的问题。
发明专利“电动扳手控制方法及装置” 涉及电动工具领域,特别是涉及一种电动扳手控制方法及装置。
发明内容
一种电动扳手控制方法,包括:检测电动扳手的运行状态;根据所述运行状态设置当前电机电流停机区间;实时采集所述电动扳手的电机电流值;判断所述电机电流值处于所述当前电机电流停机区间时,控制所述电动扳手停机。
检测电动扳手的运行状态的步骤包括:采集所述电动扳手的与转速相关的变量的值;并且,根据所述运行状态设置当前电机电流停机区间的步骤包括:根据所述变量的值设置所述当前电机电流停机区间。
根据所述变量的值设置所述当前电机电流停机区间的步骤包括:获取所述电动扳手的电机电流与所述变量之间的变化关系;根据所述变化关系及所述变量的值设置所述当前电机电流停机区间。
所述变化关系包括所述电动扳手空载时所述电机电流与所述变量之间的第一变化关系及所述电动扳手负载时所述电机电流与所述变量之间的第二变化关系。
所述变量包括所述电动扳手的扳机位置信号或所述电动扳手的电池输出电压与所述电动扳手的电机正极电压之间的压差。
一种电动扳手控制装置,包括:运行状态检测模块,用于检测电动扳手的运行状态;停机区间设置模块,用于根据所述运行状态设置当前电机电流停机区间;电机电流采集模块,用于实时采集所述电动扳手的电机电流值;停机控制模块,用于在判断所述电机电流值处于所述当前电机电流停机区间时,控制所述电动扳手停机。
所述运行状态检测模块包括:变量采集单元,用于采集所述电动扳手的与转速相关的变量的值;并且,所述停机区间设置模块包括:停机区间设置单元,用于根据所述变量的值设置所述当前电机电流停机区间。
所述停机区间设置单元包括:变化关系获取子单元,用于获取所述电动扳手的电机电流与所述变量之间的变化关系;停机区间设置子单元,用于根据所述变化关系及所述变量的值设置所述当前电机电流停机区间。
所述变化关系包括所述电动扳手空载时所述电机电流与所述变量之间的第一变化关系及所述电动扳手负载时所述电机电流与所述变量之间的第二变化关系。
所述变量包括所述电动扳手的扳机位置信号或所述电动扳手的电池输出电压与所述电动扳手的电机正极电压之间的压差。
上述电动扳手控制方法及装置具有的有益效果为:在该电动扳手控制方法及装置中,检测电动扳手的运行状态,并根据运行状态设置当前电机电流停机区间,之后实时采集电动扳手的电机电流值,并在判断电机电流值处于当前电机电流停机区间时,控制电动扳手停机。因此,该电动扳手控制方法及装置能够在电动扳手运行的各个阶段随时停机,从而能够及时有效得进行停机操作,提高了电动扳手停机的可靠性。
实施方式:
如图1所示,提供了一种电动扳手控制方法,包括以下内容。

图1
电机电流停机区间可以为小于电流阈值对应的电流区间,并且,电动扳手的不同运行状态对应的电流阈值均不同。相应地,当前电机电流停机区间则为小于或等于当前电流阈值。本发明实施例中,在电动扳手的任一运行状态阶段,当电机的工作电流小于各运行状态对应的电流阈值时,则控制电动扳手停机。
电机电流停机区间的设置方式不限于上述情况,例如:根据电流阈值的不同取值方式,电机电流停机区间还可以为小于或等于电流阈值对应的电流区间。步骤S300.实时采集电动扳手的电机电流值。
其中,电机电流值是指电动扳手的电机的工作电流值。
进一步地,还可以对电机电流值进行滤波,以提高停机判断的可靠性。
步骤S400.判断电机电流值处于上述当前电机电流停机区间时,控制电动扳手停机。
具体地,如果电机电流停机区间为小于电流阈值对应的电流区间,则步骤S400具体为:判断电机电流值小于当前的电流阈值时,控制电动扳手停机。
因此,发明实施例提供的上述电动扳手控制方法,在电动扳手的不同运行状态下,设置相适应的电机电流停机区间,从而在电动扳手的不同运行状态下能够及时有效得进行停机操作,提高了电动扳手停机的可靠性。
步骤S100包括以下内容,参考图2。
考虑到三峡水位差往往达到30m,因此本文设计两个前沿沉箱基础以及6个钢管桁架模块。其中,沉箱基础1顶高程为182m,沉箱基础2顶高程为184.5m,码头面层高程为206.5m。由于船舶将直接停靠在临水侧的钢管桁架上,不另外设置靠船构件。沉箱结构和钢管桁架结构分别见图1与图2。
步骤S110.采集电动扳手的与转速相关的变量的值。
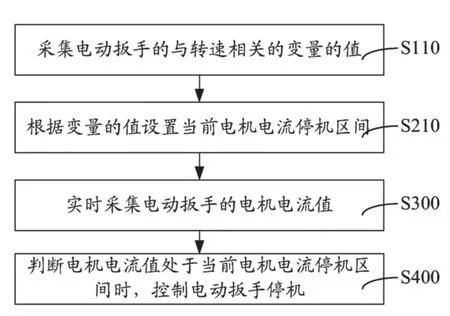
图2
其中,与转速相关的变量是指能够反映出电动扳手的转速变化的变量,换言之,电动扳手的转速发生变化时,则该变量的值也发生相应的变化。
该变量可以包括电动扳手的扳机位置信号或电动扳手的电池输出电压与电动扳手的电机正极电压之间的压差。其中,扳机所处的位置不同,则控制电动扳手的转速不同,因此扳机位置信号可以反映出电动扳手当前的转速状态。电池输出电压与电机正极电压之间的压差可以反映出电池供给电机的功率大小,同样能够反映出电动扳手当前的转速状态。
另外,在步骤S110的基础上,步骤S200包括以下内容,继续参考图2。
步骤S210.根据上述变量的值设置当前电机电流停机区间。
若变量为扳机位置信号,则根据步骤S110采集的扳机位置信号值来设置相适应的当前电机电流停机区间;若变量为电池输出电压与电机正极电压之间的压差,则根据步骤S110采集的压差值来设置相适应的当前电机电流停机区间。
因此,发明实施例可以在电动扳手的不同转速阶段,设置相适应的电机电流停机区间,从而能够随时停机。
步骤S210包括以下内容,参考图3。
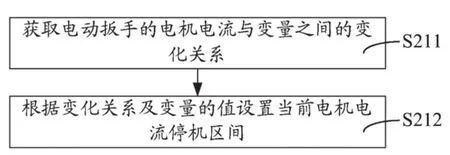
图3
步骤S211.获取电动扳手的电机电流与变量之间的变化关系。其中,变化关系可以为关系曲线。变化关系包括电动扳手空载时电机电流与变量之间的第一变化关系及电动扳手负载时电机电流与变量之间的第二变化关系。因此,根据第一变化关系和第二变化关系则可以确定在不同转速阶段对应的各电机电流停机区间。
若第一变化关系与第二变化关系均以关系曲线的方式表示,且电机电流停机区间为小于电流阈值对应的区间,那么根据第一变化关系的曲线和第二变化关系的曲线则可得出电流阈值曲线,即上述电流阈值与转速之间的变化曲线。接下来将以具体示例进行说明:
若变量为扳机位置信号,则第一变化关系的曲线、第二变化关系的曲线、电流阈值曲线的其中一种具体方式请参考图4。其中,负载曲线、空载曲线分别为第二变化关系的曲线、第一变化关系的曲线,根据负载曲线、空载曲线及根据实际情况所需的紧固件旋出长度则可以确定电流阈值曲线。这时,电流阈值曲线为电流阈值随扳机位置信号变化对应的曲线。并且,电流阈值曲线比负载曲线低ΔI,ΔI的取值与根据实际情况所需的紧固件旋出长度有关。
若变量为电池输出电压与电动扳手的电机正极电压之间的压差,则第一变化关系的曲线、第二变化关系的曲线、电流阈值曲线的其中一种具体方式请参考图5。

图4
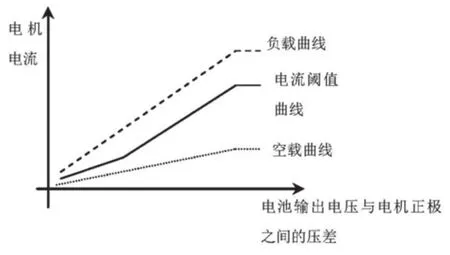
图5
其中,负载曲线、空载曲线分别为第二变化关系的曲线、第一变化关系的曲线,根据负载曲线、空载曲线及根据实际情况所需的紧固件旋出长度则可以得出电流阈值曲线。这时,电流阈值曲线为电流阈值随电池输出电压与电动扳手的电机正极电压之间的压差变化对应的曲线。并且,电流阈值曲线比第二变化关系的曲线低ΔI,并且ΔI的取值与根据实际情况所需的紧固件旋出长度有关。
变化关系的具体实施方式不限于上述情况,例如变化关系也可以直接包括电流阈值曲线。
步骤S212.根据上述变化关系及上述变量的值设置当前电机电流停机区间。
该步骤中,将变量的值代入变化关系中,即可确定相应的当前电机电流停机区间。
如果步骤S110中采集到当前的扳机位置信号,则根据图4中的电流阈值曲线可得出当前的电流阈值,从而得出当前电机电流停机区间,即小于当前的电流阈值对应的电流区间,进而可以根据步骤S300中实时采集的电机电流值来寻找合适的停机时间点,即若电机电流值小于当前的电流阈值时,则控制电动扳手停机。
如果步骤S110中采集到当前的电池输出电压与电机正极电压之间的压差,则根据图5中的电流阈值曲线可得出当前的电流阈值,从而得出当前电机电流停机区间,即小于当前的电流阈值对应的电流区间,进而可以根据步骤S300中实时采集的电机电流值来寻找合适的停机时间点,即若电机电流值小于当前的电流阈值时,则控制电动扳手停机。
图1至图3为发明实施例的方法的流程示意图。虽然图1至图3的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,图1至图3中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。

图6
提供了一种电动扳手控制装置,参考图6,包括以下内容。运行状态检测模块100,用于检测电动扳手的运行状态。停机区间设置模块200,用于根据所述运行状态设置当前电机电流停机区间。电机电流采集模块300,用于实时采集所述电动扳手的电机电流值。停机控制模块400,用于在判断所述电机电流值处于所述当前电机电流停机区间时,控制所述电动扳手停机。
发明实施例提供的上述电动扳手控制装置,在电动扳手的不同运行状态下,设置相适应的电机电流停机区间,从而在电动扳手的不同运行状态下能够及时有效得进行停机操作,提高了电动扳手停机的可靠性。
运行状态检测模块100包括:变量采集单元,用于采集所述电动扳手的与转速相关的变量的值。并且,停机区间设置模块200包括:停机区间设置单元,用于根据所述变量的值设
置所述当前电机电流停机区间。
停机区间设置单元包括:变化关系获取子单元,用于获取所述电动扳手的电机电流与所述变量之间的变化关系。
停机区间设置子单元,用于根据所述变化关系及所述变量的值设置所述当前电机电流停机区间。
所述变化关系包括所述电动扳手空载时所述电机电流与所述变量之间的第一变化关系及所述电动扳手负载时所述电机电流与所述变量之间的第二变化关系。
所述变量包括所述电动扳手的扳机位置信号或所述电动扳手的电池输出电压与所述电动扳手的电机正极电压之间的压差。
发明实施例提供的电动扳手控制装置与电动扳手控制方法对应,不再赘述。
上述实例仅表达了发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,可以做出若干变形和改进,这些都属于发明的保护范围。因此,发明专利的保护范围应以所附权利要求为准。
猜你喜欢
农业装备技术(2022年4期)2022-09-03
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
现代仪器与医疗(2021年4期)2021-11-05
农业装备技术(2021年3期)2021-06-23
智能计算机与应用(2020年4期)2020-08-31
学苑创造·C版(2017年9期)2017-09-23
军事文摘·科学少年(2016年8期)2016-11-02
少先队活动(2014年6期)2015-03-18
