基于激光点云数据的震后建筑物三维可视化建模
2021-04-27 08:17李京刘亚静刘明月
华北理工大学学报(自然科学版) 2021年2期
李京,刘亚静,刘明月
(华北理工大学 矿业工程学院,河北 唐山 063210)
0引言
进行震后建筑的三维建模对于充分了解震后建筑损毁程度以及进行灾情评估具有重要意义。传统的建筑物震害调查以实地获取震害照片为主,但由于数据采集能力的限制,很难快速获取高精度的建筑物三维数据[1]。随着现代测量技术不断更新与发展,无人机摄影测量、遥感技术以及三维激光扫描仪等手段不断应用于震后建筑震害评估[1-3]。其中三维激光扫描仪可高精度快速地获取目标物体表面的三维点云数据并且突破传统测量方法单点测量局限性的优势,目前已广泛应用于林业调查、地形测绘、变形监测、考古与文物保护及城市建设等多个领域[4-7]。基于激光点云建立震害建筑物的三维可视化模型,并将震后建筑物的真实表面以数字的形式长期完整地保存下来,有利于建筑物的灾后重建,并且进行震害信息提取从而进行联合分析,有利于满足对于地震遥感应急评估的需求,并为之提供可用的数据源评估。如李强等以北川县城扫描获取的地面激光雷达数据为实验数据,将面向对象方法引入地面LiDAR点云建筑物提取中,实现了震害建筑物自动提取[3];焦其松等采集汶川地震震后彭州市白鹿中学的精细点云数据,对建筑物的典型破坏特征及地表破裂情况进行了研究,再现了白鹿中学破坏场景,实现了震害信息的永久保存[8];沈大勇等以震后北川县城为例,探讨了震后三维场景构建过程中,通过几何修正和纹理映射实现损毁道路三维可视化[9];Dominik Brunner等提出利用震前高分辨率光学影像模拟震后SAR 影像,与震后SAR影像进行变化检测来提取震害建筑物信息的方法[10]。Rehor等人利用震后机载LIDAR 数据提取了震害信息[11]。
该项研究选取北川县城遗址内单体建筑物为研究对象,通过布置方案全面扫取研究区域的震害现场,获取完整的震后建筑物表面三维激光点云数据,然后选取部分震后受损的建筑点云数据并进行配准拼接、点云分割、去噪滤波等预处理操作。之后基于三维激光点云数据实现震后建筑物的三维建模,实现三维实体重建,并给出受损建模具体过程以及精度分析。
1数据与方法
1.1 点云数据的获取
为了获取完整的三维激光点云数据,应遵从以下布设原则:首先,通过对现场进行实地踏勘,根据测区现场地形特征和地物特征布设作业范围,并布设扫描站点,合理安排扫描仪器的位置确保相邻站点数据具有重叠部分。同时尽可能减少测站数,以便减少数据量和测站之前的拼接误差。其次,确保遮挡较少,避开其他人员干扰,从而使数据包含完整的建筑信息。
该数据采集利用Rigel VZ-400三维激光扫描仪对建筑物进行扫描,扫描速度为125 000 pts/s,扫描仪的点间距<1 mm;距离精度为±5 mm,扫描视场范围为360°×100°(水平×垂直),设置此次的扫描模式为:长距模式。在不同的站点获取点云数据,使建筑物完全被扫描,确保目标不被漏点。
1.2 点云数据预处理
1.2.1数据拼接
为了获取目标建筑物点云数据全貌,将在不同扫描站所获取的点云数据进行点云拼接。点云拼接是通过2个扫描站间点云数据的对应关系,将2个坐标系下的点云数据转换到同一个坐标系中,也称之为点云配准[12]。点云拼接分为粗配准和精配准,当粗配准精度不满足要求时,利用精配准进一步提高精度。粗配准,点云数据的拼接使用Riscan Pro软件对点云数据进行初步处理,以选取同名点的配准方法,相邻两站依次进行配准。在选取同名点时,尽可能精准选取两站重合的同名点,以便减小误差。拼接完成之后可为每站的点云赋予不同的颜色,从而观察拼接之后的效果。常采用的精配准算法是ICP迭代法(Iterative Closest Point)也叫迭代最近点法,该算法是由Besl和Mckay在1992年提出[12],通过利用最小二乘迭代法使平移参数和旋转参数最优,并使误差函数最小。该项研究通过点云拼接之后的精度可达到4.6 mm。
1.2.2数据去冗
为了提高数据处理效率和对电脑软硬件的配置要求。需要数据去冗,数据去冗分为粗删和精删。粗删主要是对震后建筑物研究对象以外无关的事物进行删除,而对于建筑物倒塌的部分进行保留,以便还原、保留更真实的震后情况。精删主要是对局部具体细节,如通过透过门窗等扫描的点云在建筑物内部进行剔除。
1.2.3去噪滤波
为避免数据量过大,致使在Risan Pro软件中无法生成polydata,引起数据导出失败,在数据预处理过程中需要对数据进行多次滤波和抽稀。在不影响数据质量的情况下尽可能减少数据量,以便在软件中导出数据,并提高点云计算速率从而提高建模效率。去噪滤波是通过对激光扫描回波信号强度的辨别来对点云数据中错误点及粗差点进行剔除。通过中值滤波剔除奇异点,利用曲面拟合去除前端遮挡物,当回波信号强度低于阈值时,距离信号值为无效[13,14]。以上数据拼接数、数据去冗以及去噪滤波主要通过Risan Pro软件进行,在完成数据预处理之后,以文件形式保存提取出的目标建筑物并用于三维建模。
1.3 基于点云的震后建筑物三维建模方法
Geomagic Studio具有强大的逆向建模功能,在我国已得到广泛的应用。该软件遵循点阶段—多边形阶段—曲面阶段的三阶段作业流程,可以轻易地从点云创建出完美的多边形模型和样条四边形网格,并可自动转换为NURBS曲面,建模效率高[15]。在通过Risan Pro软件完成点云数据预处理基础上,基于Geomagic Studio软件实现震害建筑物三维可视化建模,通过数据的转换导入、分割以及处理完成目标建筑物的模型的构建,在处理过程中一般分为点、多边形和曲面3个阶段。图1所示为震后建模流程。
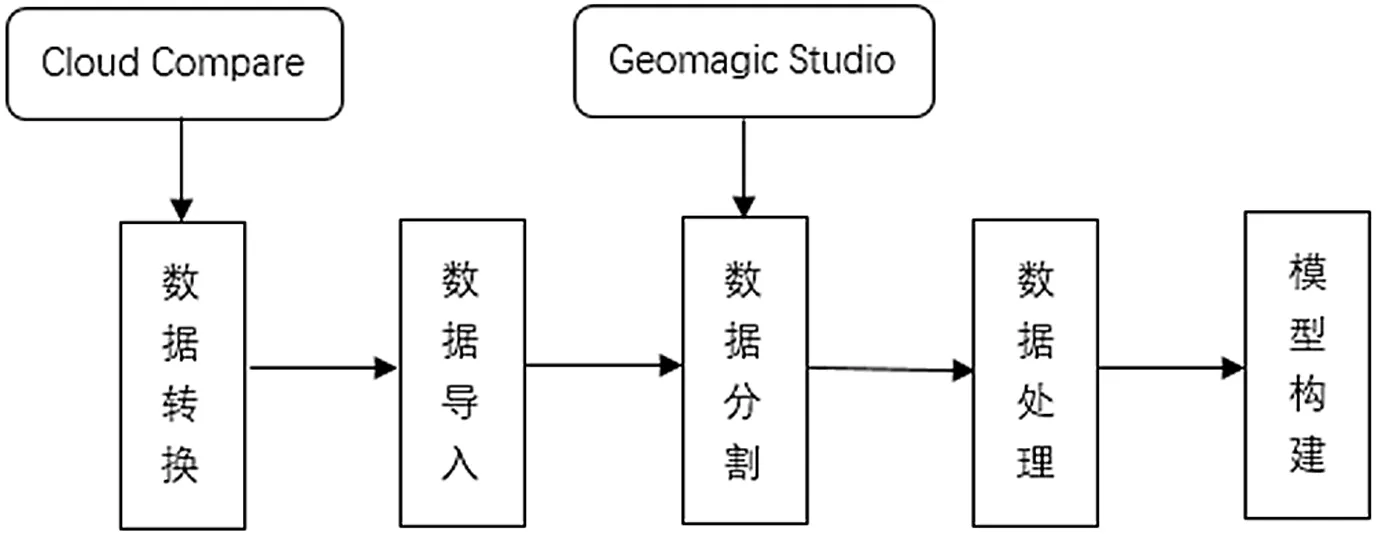
图1 震后建模流程
1.3.1点阶段
在点云预处理阶段已进行拼接、冗余剔除以及去噪滤波。点阶段继续进行点云阶段的处理。首先利用Cloud Compare转换为ply格式,导入Geomagic Studio软件。为使得建筑物特征明显、清晰以及提高计算速率和建模效率,在点阶段进行数据分割。点云分割就是将同一片曲面上获得的点云数据赋予相同标志的过程[16]。点云分割的方法主要有2种:手动分割和自动分割,其中手动分割适用于数据特征明显,分割次数少的情况。目前RainDrop公司推出的软件Geomagic Studio未对点云数据分割进行深入研究和应用。所以该项目运用软件进行手动分割,在分割过程中要尽可能减少分割次数,使分割后的数据凸显各个形状特征,确保模型建模贴近真实情况,从而使模型在后期封装的精度更高、特征更加明显、可视化效果更好。
1.3.2多边形阶段
首先进行封装,所谓封装就是通过点云数据创建多边形的过程。点云的封装主要有曲面封装和体积封装。曲面建模从局部进行三角网格化,然后不断延伸直至实现全局网格化,曲面封装建模速率较快,并且节省计算机内存,主要用于数据均匀或完整的曲面。体积封装主要用于数据不完整不均匀的数据,需要时间较多,计算速率较慢[17]。该项研究采用曲面封装的方法,利用封装工具对点云进行封装,完成基本模型的初步建立。在完成封装后,再对一些之前漏掉的杂点封装成的点云集合进行去除,对于与所要建模的建筑物无关的数据进行删除或者去除特征处理。
由于所获得的点云的质量问题而导致封装后所建立的基本模型缺少点云数据而产生孔洞。需要对孔洞进行修补,修补处应尽量与周围特征面保持一致。对于模型曲面上的凸形部分,可以选择去除特征或是删除钉状物功能加以去除,并且可以使用快速平滑和砂纸功能使模型表面更加平滑。在分块的模型合并的前后,为防止由于封装成型的三角形数量过多而导致在显示时形成点云状,需要对模型进行简化,在简化时选取70%~90%之间。选取百分比的太小要适中,太少会使简化效果不好,太多会导致丢失掉许多细节。
模型合并主要有2种方法:一种是直接对点云进行拼合,另一种是各个部分构造几何形体最后再拼接几何形体[17]。该项研究选取的是先将各个部分的点云构造几何体处理好后再进行模型的合并。把最初分割后处理好的模型通过导入的方式导入到一起,由于模型的坐标系是相同的,所以在分割后再次合并的时候可以相互吻合。选取2个模型通过合并工具进行合并,使之成为一个完整的模型。
1.3.3曲面阶段
曲面重构就是根据点云数据构造出一个用精确的数学函数描述的曲面。一般采用过插值和近似这2种方法进行曲面的构建,其中近似法只需要逼近原始数据即可。
三维曲面模型构建原理:
f(x,y,z)=a1x2+a2y2+a3z2+a4xy+a5yz+a6yz+a7x+a8y+a9z=0
(1)
其中x、y、z分别为点云数据的三维坐标,ai为拟合系数。
基于曲面的模型重建时直接对测量数据进行曲面片的拟合,然后再将获得的曲面片经过过渡、混合、连接形成最终曲面模型的过程。
1.4 偏差分析方法
1.4.1仪器测量误差
点云数据误差主要来源于测距和测角的误差。这两方面对精度的影响为:

(2)
其中,m1为点云数据总误差,md为仪器测距误差,mβmβ为仪器测角误差,S为测站与目标间的水平距离。点云的位置信息对距离误差影响较大。距离误差不仅取决于所测目标的距离,还受到测量次数的影响。距离越长,误差越大。测量次数越少,误差越大。
Rigel VZ-400三维激光扫描仪的测距精度为3 mm+2 ppm,测角误差最大不超过0.5″,测站距离目标在100 m以内。代入(2)式可得,m1=3.2 mm。
1.4.2三维建模误差
根据建模应用分析之后可得建模误差m3分别为0.412 mm和0.030 mm。
根据误差传播定律可得,点位误差的理论值为:
(3)
将以上数据代入(3)中,得m分别为5.62 mm和5.60 mm。
2建模结果及其应用偏差分析
2.1 建模结果
基于由Rigel VZ-400扫描获取的激光点云数据,采用Geomagic Studio实现对震害受损建筑物进行三维可视化建模。建模结果如图2所示。
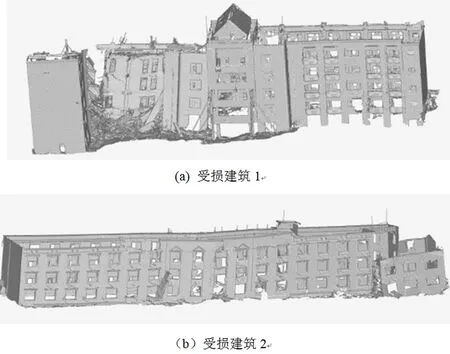
图2 震害受损建筑物三维可视化建模结果
2.2 模型的应用分析
建模完成之后对模型进行偏差分析,最大偏差分别为3.814 mm、-3.829 mm、1.425 mm、-2.076 mm。模型与点云数据的标准偏差分别为为0.412 mm,0.030 mm。通过偏差计算得出,2个受损建筑精度分别为5.62 mm,和5.60 mm。对震后建筑物的重建不仅是形状上的还原同时还对还原的精度进行了计算和说明,经偏差分析表明,该模型可获得较好的精度,并能够很好地保存实体的灾害信息,从而实施三维可视化的浏览和定位量测。如图3、图4所示为偏差分析。
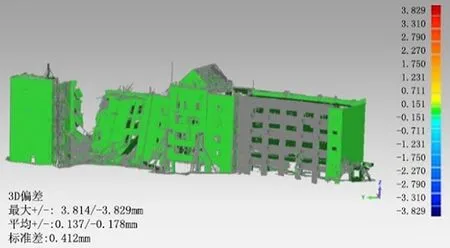
图3 偏差分析a
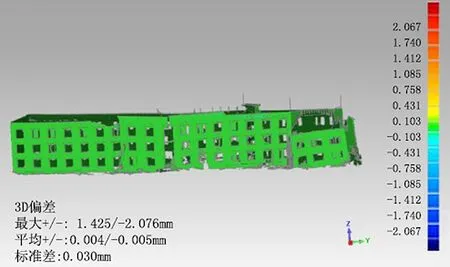
图4 偏差分析b
3结论
(1)以北川旧县城遗址的部分震后建筑物为例,利用Rigel VZ-400三维激光扫描仪获取点云数据,先后进行了点云数据拼接、特征点提取和数据转换等预处理,利用Geomagic Studio完成了震后建筑物三维可视化建模,并进行了偏差分析。
(2)三维激光扫描技术作为新兴的技术手段,它在一定程度上可提高震害建筑物提取精度,同时还能较好地应用于地震应急与震害评估中,不仅可为之后的震后灾情研究提供有效而又丰富的实体信息,并可为地震灾害精准评估及受损建筑物复原提供科学参考,还可为遥感应急救援与评估增添新的可用数据源。
猜你喜欢
商界评论(2022年1期)2022-04-13
学生天地(2020年6期)2020-08-25
数学大王·趣味逻辑(2019年10期)2019-11-06
小学生学习指导(低年级)(2019年9期)2019-09-25
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
畅谈(2019年9期)2019-05-27
汽车技术(2019年2期)2019-03-04
草原(2018年2期)2018-03-02
卷宗(2017年16期)2017-08-30