基于多旋翼无人机的小型海洋磁力数据采集系统设计与实现
2021-04-26 07:35赵展铭裴彦良梁冠辉刘保华3
海洋技术学报 2021年1期
赵展铭,裴彦良,梁冠辉,宗 乐,刘保华3,
(1. 长江大学 电子信息学院,湖北 荆州 434020;2. 自然资源部第一海洋研究所 自然资源部海洋地质与成矿作用重点实验室,山东 青岛266061;3. 青岛海洋科学与技术国家实验室 海洋地质过程与环境功能实验室,山东 青岛 266061;4. 国家深海基地管理中心,山东 青岛266237)
海洋磁力测量技术是认识海洋、开发海洋的重要途径[1]。获取海洋磁场信息不仅在科学考察中有助于阐明区域地质特征和勘察海洋资源,并且在军事领域也具有重要作用。现阶段,海洋磁力测量的主要方式依旧是船载磁力测量,该方式虽然可以获取较高精度的磁场信息,但我国拥有漫长的海岸线、大大小小的无人岛屿以及浅滩、暗礁、养殖区等复杂区域,这些特殊的区域使得测量船难以进入,导致部分区域磁力数据缺失[2]。因此开发一种可以在复杂海域作业,并且具有高精度、高分辨率的磁力测量系统十分必要。
近年来,无人机平台技术已趋于成熟,国内将无人机应用到陆地航磁测量已较为普遍,但相比陆地航磁调查,国内的海洋无人机航空磁测的研究尚处于起步阶段。例如,国家海洋局第一海洋研究所在国家高技术研究发展计划(863计划)支持下开展了无人直升机航磁系统研究,2013年搭载V750样机在渤海莱州湾进行了系统的无人机航空磁力探测试验,完成共计511 km的测线任务[2]。2013年,海军海洋测绘研究所与中船重工715所在天津大港海滨区进行了无人直升机海洋航磁测量试验,并通过无人船进行磁力验证[3-4]。
由于海洋船只空间环境有限,大中型无人机在测量船只上的起飞与降落目前依旧是海洋航磁测量的难题之一。相比于大中型无人机,小型旋翼无人机具有体积小、重量轻、操作简单垂直起降等特点,可搭载于测量船上进行复杂海域的磁力探测[5-7]。综上所述,项目组将多旋翼无人机搭载磁力仪等设备应用于海上磁力探测,组成了一套小型便携式海洋磁力测量系统。结合小型旋翼无人机平台的载重能力以及对航磁数据采集的精度需求,本文围绕该系统设计了一套数据采集系统,具有体积小、重量轻、精度高等特点,可以实时采集磁力数据、姿态数据和GPS定位数据,并把数据存储在SD卡中,以便后续的数据处理与分析。
1 系统设计
1.1 无人机航磁系统简介
无人机航磁测量是一种利用无人机平台搭载相关磁力探测设备进行磁力探测的方式,具有安全性高、成本低、易操作等特点,可以不受地表地形等因素影响,在一些复杂特殊的海域上进行高精度的磁力测量。
本次试验所搭建的无人机航磁系统由多旋翼无人机平台、铯光泵磁力仪、碳纤维连接杆和电子设备舱组成。其中,电子设备舱内置锂电池、数据采集模块、GPS模块和姿态传感器等设备。铯光泵磁力仪探头和电子设备舱固定在碳纤维连接杆的两端,旋翼无人机通过吊拽的方式与碳纤维连接杆相连并进行航磁测量。无人机航磁系统示意图如图1所示。

图1 无人机航磁系统示意图
该旋翼无人机的有效载重为5 kg,飞行速度为8 m/s,相比于海洋磁力数据采集系统,要求整个航磁系统在保证采集精度的前提下尽量轻以提高无人机有效航程,采样率尽量高以保证高速飞行期间的空间采样密度。因此,数据采集系统的设计在此原则下进行。
1.2 采集系统总体设计
本文设计的数据采集系统主要功能是执行航磁数据、定位数据以及姿态数据的实时采集与处理。
数据采集系统是以STM32F407ZGT6单片机作为控制核心,结合高性能FPGA、GPS、姿态传感器、ESP8266WiFi模块、SD卡存储模块等,实现了无人机航磁探测数据的采集,并在航磁任务中将所采集到的磁力数据、相应的空间坐标数据及磁力仪姿态数据进行实时存储记录。
采集系统总体框图如图2所示。铯光泵磁力仪输出的拉莫尔频率信号经前端整形电路处理后,由高性能FPGA模块进行频率测量,航磁任务开始前,主控制器STM32F407ZGT6通过3个串口分别采集FPGA模块、GPS模块和姿态模块的数据进行处理,并将数据通过WiFi模块无线传输到上位机进行观测,判断仪器工作是否正常。航磁任务执行期间,主控制器自动按照上述采集方式将所采集到的磁力数据、GPS定位数据以及在吊拽状态下磁力仪的姿态数据通过SDIO接口同步存储在MicroSD卡中。
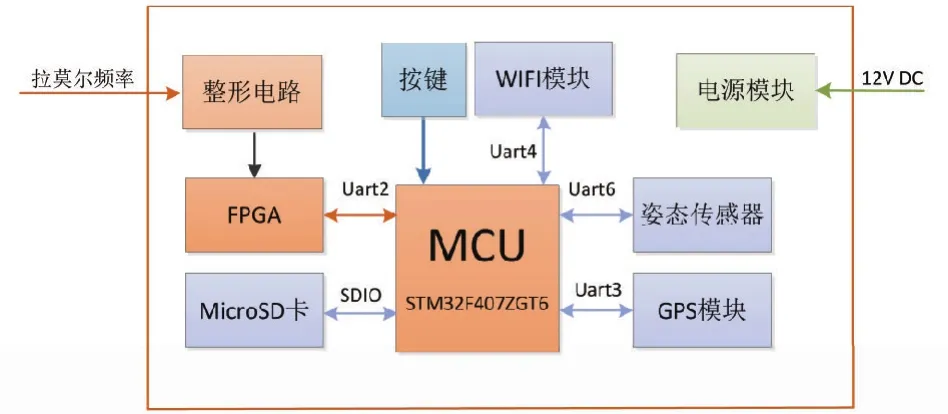
图2 采集系统设计框图
1.3 磁力信号测量
本设计所用的磁力仪为国产高精度铯光泵磁力仪,铯光泵磁力仪输出的拉莫尔频率f与外界磁场强度H成正比,其比例常数称为铯的旋磁常数,约等于3.498 577 Hz/nT,因此通过测量拉莫尔频率f则可以得到被测磁场强度H=f/3.498 577(nT)[8]。
铯光泵磁力仪的频率信号有两种输出方式,一种是将振幅调制在电源线上的混合拉莫尔信号,另一种是兼容TTL电平的方波电压信号。本文采用第二种直接测量方波信号的频率。由于直接从传感器得到的矩形脉冲经传输后往往会发生波形畸变[9-12],因此本文使用了施密特触发器来对方波信号整形,得到比较理想的矩形脉冲波形后再对其进行频率测量[9]。
频率测量通常有两种方式,周期测量法和频率计数法。周期测量法是先测量出被测信号的周期T,然后根据频率f= 1/T求出被测信号的频率。频率计数法是在时间t内对被测信号的脉冲数N进行计数,然后求出单位时间内的脉冲数,即为被测信号的频率,但二种方法皆存在±1个被测脉冲信号误差,本文采用一种改进后的等精度测频法来对频率信号进行测量。
2 系统实现
2.1 等精度测频法
等精度测频法是基于传统测频法的一种改进,它的最大的特点是测量的实际门控时间是一个与被测信号有关的值,刚好是被测信号的整数倍,因此它可以消除被测信号计数器±1个脉冲的误差,且相对误差与被测频率的大小无关,仅与门控时间和基准频率有关,等精度测频法时序图如图3所示。

图3 等精度测频法时序图
图3中,T1为预置门控信号时间;T2为实际门控信号时间;fx_cnt为实际门控信号内被测信号个数;fs_cnt为实际门控信号内基准时钟个数。
当门控信号使能时,在基准时钟的上升沿,预置门控信号给出高电平,但此时并未开始测频计数,而是等到被测信号的上升沿来到时才开始对基准频率与被测频率同时进行测频计数,当预置门控信号经过T1时间结束时,也要等到被测信号的沿到来时才同时停止对基准时钟频率与被测信号频率计数。基准时钟频率为clk_fs,被测信号频率为clk_fx,实际门控时间为T2,在T2时间内对基准时钟频率和被测信号频率的脉冲计数值分别为fs_cnt和fx_cnt,则被测信号频率可由式(1)求得:

因为门控时间是被测信号的整数倍,这就消除了对被测信号产生的±l周期误差,但是会产生对基准时钟±1周期的误差,则基准时钟信号误差为式(2):

因此门控时间误差为式(3):

进而可以推出,被测频率的误差为式(4):

等精度测频法的相对误差可由式(5)得到:

由上述公式可以证明,等精度测频法的相对误差与被测信号频率大小无关,只与基准时钟和门控时间有关,例如当门控时间为1 s时,理论上就只存在一个周期的基准时钟误差,由于基准时钟频率远高于被测信号,因此它产生的±1周期误差对测量精度的影响十分有限,特别是在中低频测量的时候,相较于传统的频率测量和周期测量方法,可以大大提高测量精度,满足磁总场测量需要。
此外,在航磁任务中若要进行磁总场梯度测量时,则要保证各磁力仪之间的采集完全同步,可在此等精度测频法的基础上,引用数字内插原理来保证各磁力仪探头之间的同步采集[13],其原理图如图4所示。

图4 数字内插法原理图
被测信号频率值为式(6):

此方式同样可以消除被测信号±1的周期误差,并且测量采样的输出时间受到闸门信号控制。当利用多个磁力仪进行磁梯度测量时,可使用相同的闸门信号控制采样间隔即可实现多个磁力仪的同步采集。
2.2 硬件实现
2.2.1 主控单元
主控单元主要实现对4个串口的控制,完成磁力数据、GPS数据和姿态数据的采集以及与WiFi模块的通信,并将数据保存在SD卡中。系统主控制器选用ST公司的STM32F407ZGT6低功耗微控制器,该芯片基于32位ARM Cortex-M4内核,主频高达168 MHz,适用于带有浮点运算的应用,满足数据采集系统的硬件需要。除主控制器以外主控单元还包含复位电路、时钟电路等。
2.2.2 磁力测量单元 磁力测量单元主要实现对磁力仪输出的拉莫尔频率进行整形并进行高精度计数,将结果通过串口2传输给主控制器换算成磁场值。磁力测量单元电路主要包括FPGA芯片、74HC14触发器、50 M晶振及复位电路等,其中FPGA芯片为核心器件。本设计将Altera公司的CycloneIV系列的EP4CE10F17C8芯片选作为核心器件并结合上述等精度测频原理来对磁力信号进行测量,该FPGA芯片拥有丰富的逻辑单元,且功耗低、尺寸小,满足磁力测量任务的需要。
2.2.3 无线通信模块 无人机航磁任务开始前,需要判断各仪器设备是否正常工作,最直接的办法就是将开始测量到的数据通过无线的方式传输到上位机观测一段时间,保证航磁任务中各传感器的正常运行。
无线通信模块选择以ATK-ESP8266为核心处理器的WiFi模块,该模块采用串口与MCU通信,内置TCP/IP协议栈,可实现串口与WiFi之间的转换。本设计中利用主控制器通过串口4在初始化时将WiFi模块配置为STA-TCP_client模式并开启透传模式,系统上电后,首先将采集到的磁力数据、GPS数据和姿态数据传输到上位机显示,观测各仪器的工作状态,1 min后自动转换成连续采集模式。
2.2.4 姿态传感器 无论是航磁补偿、质量监控,还是对数据后处理解释参考,飞行姿态角的测定都是不可或缺的步骤。在对采集到的磁力数据进行处理分析时,需要结合现场的姿态数据,保证发现的“磁异常现象”是由于地质结构引起的,而不是由于无人机飞行中姿态变化引起的。
姿态角的测量精度影响着磁力数据的分析结果。本设计中姿态传感器选用的是美国PNI公司生产的TCM2.5,该传感器具有精度高、体积小、抗干扰能力强等优点,其罗盘航向精度为0.8°,分辨率可达0.1°,横滚和俯仰的精度为0.2°,分辨率优于0.01°。本试验对姿态采样率设定为4 Hz,波特率为9 600,输出端口采用RS232标准通信接口,主控制器通过串口与其通信并采集磁力仪设备在空中的姿态信息。
2.2.5 GPS模块 本设计所用的GPS模块为RAC-P1高精度卫星定位接收机,其定位精度可稳定保持在1 m以内,主控制器通过串口3与其进行通信,设定数据更新速率为10 Hz,并对接收到NMEA数据进行解析,获得所需要的定位信息,以便结合姿态数据对磁力信号进行后续的处理。
2.2.6 数据存储 数据存储模块主要是用于无人机航磁任务途中对数据进行实时的存储记录,根据实际需要,考虑到野外工作环境较为复杂,现场人员必须方便地对数据进行读取。综上所述,本次设计选用MicroSD卡作为数据存储介质,主控制器使用SDIO接口驱动,并通过移植FATFS文件系统来控制SD卡的读写操作,数据保存格式为文本文档格式,方便现场人员进行数据拷贝。
2.3 硬件电路
采集系统硬件电路主要包括DC-DC稳压电路、EP4CE10F17C8芯片、50 M温补晶振、配置芯片EPCS16、JTAG下载接口模块、74HC14施密特触发器、STM32F407ZGT6最小系统、LED指示灯、EPS8266WiFi模块、SD卡模块等,硬件原理图如图5所示。
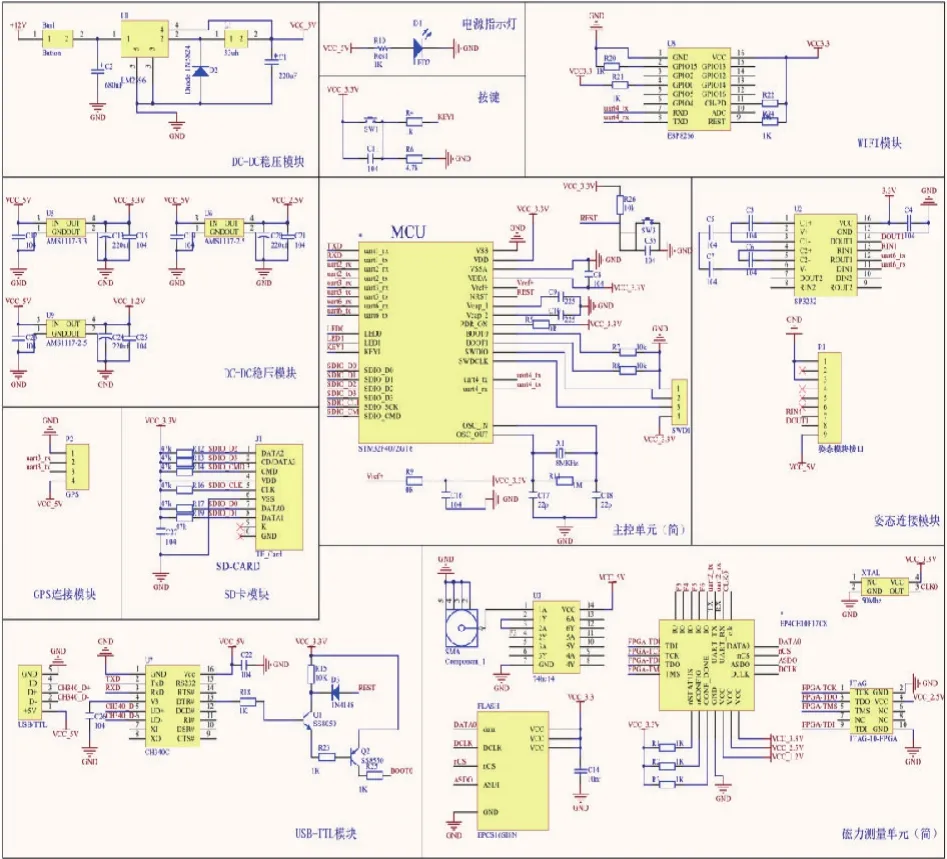
图5 硬件电路原理图
该数据采集系统设备长度为11 cm,宽8 cm,高6.5 cm,重量为220 g左右。具有体积小、重量轻等特点,且对磁力数据的采样率为10 Hz及以上,符合上述航磁系统任务设计要求。采集系统硬件实物图如图6所示。

图6 数据采集系统实物图
2.4 软件编写
2.4.1 FPGA软件设计 本设计中FPGA的主要功能是对磁力信号进行测量,FPGA芯片主要包含5个模块:等精度测频模块、时钟分频模块、PLL模块、串口模块、状态机模块。其中,时钟分频模块用来模拟输入信号,等精度测频模块是基于等精度测频原理来对输入信号进行频率测量,PLL模块可以选择基准时钟进行倍频,从而降低等精度测频法的误差,串口发送模块是用来将测量得到的32位的基准时钟个数与32位的被测时钟个数,并以状态机的形式发送给主控制器进行处理,发送格式为AA(帧头)+基准时钟个数+被测时钟个数+BB(帧尾),各模块采用Verilog硬件逻辑描述语言实现。其模块结构图如图7所示。

图7 FPGA内部模块设计图
2.4.2 单片机软件设计 以ST公司STM32F407ZGT6单片机作为主控制器,其程序采用C语言编写,软件调试采用德国KEIL公司的一种多功能的集成开发环境软件MDK5。主控制器主要实现以下功能。系统上电时,检测挂载SD卡并配置好WiFi模块,程序初始化后会延时一段时间等待GPS与姿态模块的稳定,并启动模式1。在模式1下采集到的数据不会保存,而是通过WiFi传输到上位机显示1 min。数据观测正常后,自动转为模式2。在模式2下,串口2接收FPGA发送的数据解析成磁场值并在RAM中进行缓存。串口3接收GPS的GPRMC数据并在RAM中进行缓存,串口6接收姿态传感器数据并在RAM中进行缓存,同时启动定时器,每一秒将缓存的3种数据写入一次SD卡,每3 min对SD卡进行一次数据保存,以防止无人机飞行途中数据意外丢失。当航磁任务完成后可通过按键来关闭SD卡,再次保存数据。系统流程图如图8所示。
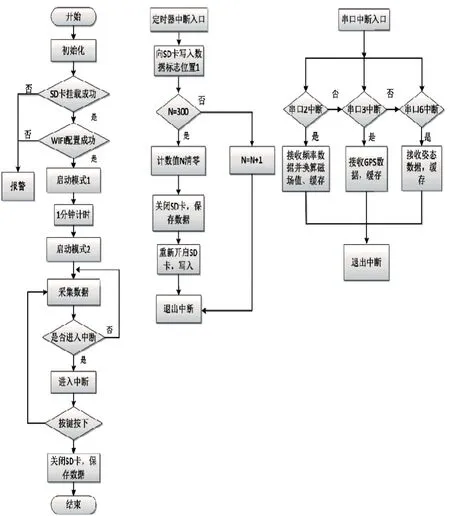
图8 系统流程图
3 系统测试
3.1 实验室测试
本设计将爱普生TG-5501CA-97N 50 MHz晶振用作磁力测量单元的时钟晶振,也是上述等精度测频法的基准时钟信号。该温补晶振的总频差为50 Hz。
实验室测试分三步实现:第一步,将该50 M晶振通过安捷伦53132A频率计数器验证其稳定性;第二步,将此50 M晶振的输出脉冲分频作为测试信号,输入至磁力测量单元,用来测试程序的可行性;第三步;通过Tektronix AFG2021函数/任意波形发生器模拟磁力信号输入到磁力测量单元进行测试。
通常情况下,地磁场的强度约在50 000 nT~60 000 nT之间,因此对应拉莫尔频率信号测试范围主要为170 ~ 210 kHz之间,所测频率值保留小数点后3位,采样率为设为10 Hz。所用晶振稳定性测试示意图如图9所示,晶振脉冲信号分频测试结果如表1所示,波形发生器输出测试结果如表2所示。
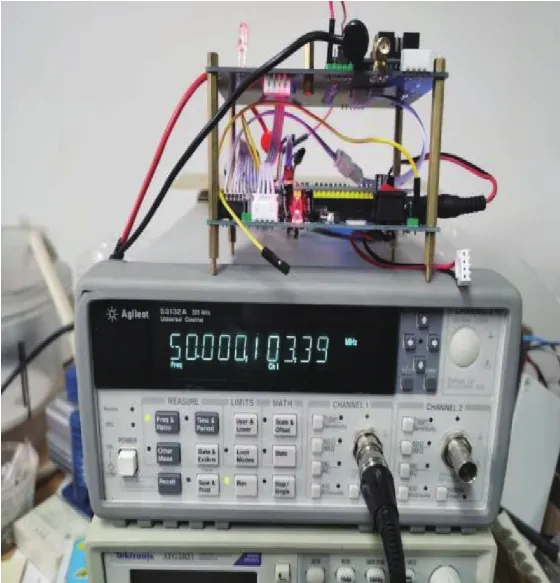
图9 晶振稳定性测试示意图
在实验室内通过安捷伦53132A频率计数器对晶振脉冲进行观测,发现此晶振的抖动范围仅在小数点后两位跳变,稳定性能极好,适用于高精度的频率测量。
表1测试是将此晶振进行500,400,300,250,200分频测量得到的,被测时钟与基准时钟是基于同一时钟下,由上表的数据可以说明程序上的可行性。

表1 晶振脉冲信号分频测试结果
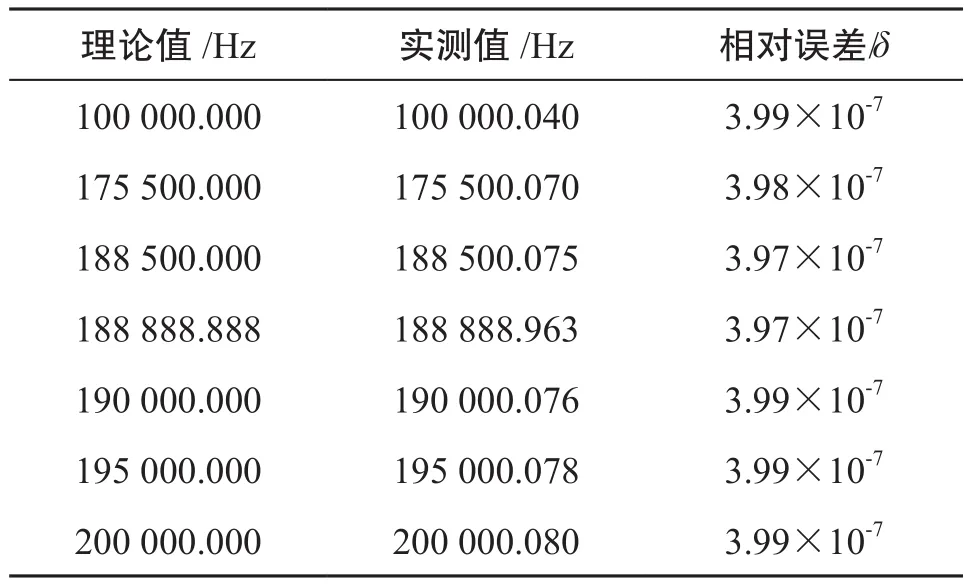
表2 波形发生器输出测试结果
以上测试是将Tektronix AFG2021函数/任意波形发生器直接输入到本采集系统中的磁力测量单元进行频率测量,将所测得的结果与理论值进行计算,得到相对误差,从以上数据可知,在170~210 kHz频率范围内,该采集系统相对误差均小于4.0×10-7,满足试验误差要求。
此外,将信号发生器输出频率以0.001 Hz为步进间隔增加,取测量值发生变化时,此时增加的最大幅度为当前频段的有效分辨率,经测试此频段下的频率计数分辨率约为0.005 Hz左右,对应磁场值约为1.4 pT左右,满足试验要求。
3.2 无人机航磁采集测试
无人机航磁试验选在国家深海基地管理中心码头海域开展,提取某段测试结果中的定位数据与磁力数据后如表3所示,其中无人机飞行的海拔高度保持在65 m左右。

表3 航磁采集测试结果
表中的数据仅为实际测线数据中的一部分,且表中提取的数据间隔为1 s,测试结果验证了该采集系统在航磁任务中能够完成对数据的采集与存储,满足无人机航空磁力测量的要求。
4 结 论
本文围绕多旋翼无人机的小型海洋磁力测量系统,研制了一套数据采集系统,该系统具有体积小、重量轻、精度高等特点。其设计原理主要基于STM32单片机和FPGA芯片,并结合铯光泵磁力仪、GPS传感器、姿态传感器等,实现了对磁力信号的高精度测量以及对GPS定位数据和姿态数据的实时采集和存储。此外,在航磁任务开始前,可通过WiFi模块将采集的数据传输到上位机显示,便于工作人员及时观测传感器设备工作状态,提高航磁测量的可靠性。通过实际航磁测试,验证了该数据采集系统的有效性与实用性,满足航磁任务的需要。对海洋航磁测量的数据采集具有一定参考意义。
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
格言·校园版(2021年22期)2021-09-27
智慧少年·故事叮当(2021年3期)2021-06-29
初中生世界·七年级(2021年12期)2021-01-21
小学生学习指导(低年级)(2020年10期)2020-11-09
天天爱科学(2020年6期)2020-09-10
学苑创造·B版(2019年8期)2019-08-09
探索科学(2017年4期)2017-05-04
数学大王·中高年级(2017年2期)2017-02-08
哈尔滨理工大学学报(2016年2期)2016-09-12