
一种基于改进光流法的视觉惯性状态估计器
2021-04-26 04:12:36刘奕杉
科学技术创新 2021年10期
刘奕杉
(广东工业大学,广东 广州510006)
1 概述
实时定位和建图(SLAM)起源于20 世纪80 年代,它广泛应用在移动机器人、无人机、虚拟现实、无人驾驶等领域。它解决的主要问题是机器人在未知环境的定位和建图问题。传统的定位方式多以GPS 为主,然而这种定位方式难以适应复杂陌生环境,所以SLAM 技术应运而生。SLAM 根据后端方法的差异,可以分为基于滤波和基于优化这两大类,根据传感器差异也可以分为激光SLAM 和视觉SLAM[1]。然而,单一传感器难以满足高精度的定位效果,所以在实际应用中,常见融合多种传感器的信息用于机器人定位,常见的有视觉和惯性单元的融合。视觉传感器可以提取现实场景丰富的信息,但它受环境影响大,当面对光照变化大、纹理缺失、快速运动等情形,无法有效追踪物体运动。惯性单元可以得到加速度和角速度,且不受图像质量的影响、采样频率较高,但存在长时间累计误差的问题。所以视觉传感器和IMU 具有优劣互补的特点。
本文研究基于光流法的视觉惯性SLAM 系统。我们结合改进的光流法和IMU 信息,然后基于LM 的非线性优化算法,实现了一个精度较高的视觉里程计。本文将从改进的光流法、惯性单元预积分,系统框架三部分对该方案进行描述,最后将通过实验展示该系统的运行效果。
2 正文
2.1 光流法
Lucas-Kanade 光流法是Bruce D. Lucas 等人于1981 年在文献[2][3]提出来的。它被广泛地应用到图像配准、运动追踪,目标检测等方面。根据计算图像的部分像素或是全部像素的运动,可以将它分为稀疏光流法和稠密光流法。光流法的原理依赖于三个假设。第一个是灰度不变假设 I ( x + dx,y + dy,t + dt ) =I ( x, y , t ),它要求t 时刻在坐标(x,y)处的灰度值 I ( x, y , t)和t+1 时刻的灰度值I ( x + dx, y + dy, t +dt )相等。第二个是要求相邻图像帧是小运动。第三个是空间一致性,它假定相邻像素之间具有相同的运动。光流法在视觉SLAM 中的前端被广泛使用,它具有响应速度快、计算量小等特点。但同时光流法受光照影响大、相机发生大尺度运动容易跟丢、图像的单个像素点没有区分度等缺点。
为了更好地适应实际环境,需要对传统的LK 算法进行改进。为提高光流追踪的速度,我们采用逆向组合[4]的方法。传统的LK 算法在更新参数的过程中需要不断计算雅可比矩阵和Hessian 矩阵,降低了光流的追踪效率。而使用逆向组合的方法可以使得算法在迭代过程中只需要计算一次Hessian 矩阵,这有效提高了光流算法的效率。传统的光流法对光照变化比较敏感,所以使用一种局部差异平方和[5]的形式,将处理单个像素点的形式转化为处理像素块的形式。我们把相邻图像间对应像素块的运动追踪问题转换为估计变换矩阵T。该变换矩阵T 最小化对应像素块之间的差值,我们将它定义为如下的残差形式。
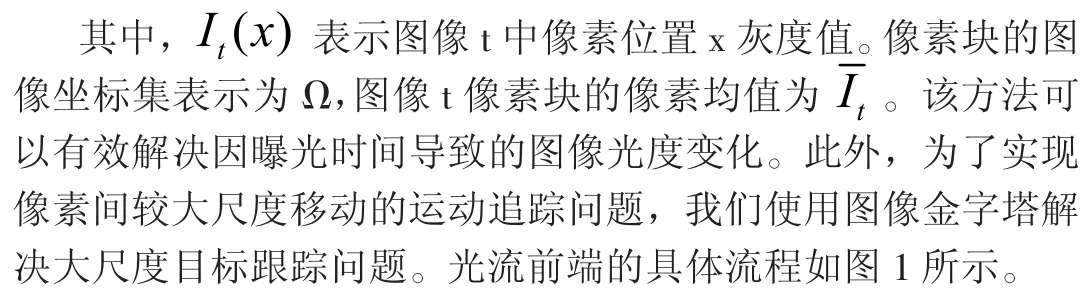
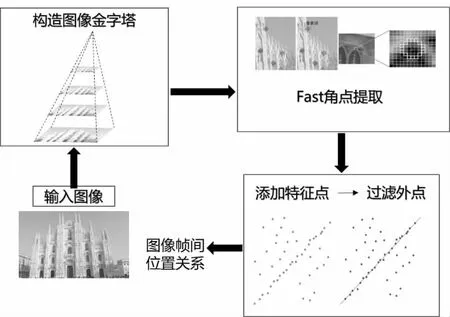
图1 前端流程
2.2 IMU 预积分
由于纯视觉的定位方式难以实现鲁棒的定位要求,所以采用视觉融合IMU 的方式可以更好的让系统适应现实需求。根据IMU 模型,我们得到连续时间下的运动模型。
图2 不同噪声条件的参考轨迹和估计轨迹



2.3 系统框架
该系统主要分为基于光流法的前端、基于LM 非线性优化的后端、系统初始化部分。首先,光流法前端不断接收单目相机的图像数据,并对图像进行FAST 角点的提取,再使用光流法追踪相邻图像帧间的特征点,从而得到运动轨迹。同时,系统不断接收IMU 的加速度和角速度的数据,并对图像帧间的IMU 数据进行积分处理。然后进行系统初始化,该方法主要是借鉴了VINSMONO 的系统初始化[7],可以恢复出尺度、重力、速度和IMU 的bias,从而将视觉轨迹和IMU 轨迹对齐。而后,将视觉和IMU 得到的轨迹放入到后端非线性优化当中,该部分主要使用了LM 算法不断迭代优化相机位姿,从而得到准确的相机运动轨迹。
3 实验与分析
该系统的实验环境是ubuntu18.04,使用多线程进行数据传输。同时,使用了pangolin 库可视化相机的运动轨迹。此外,生成自定义轨迹测试系统,并设置了三种噪声情况,分别是噪声轨迹1: acc-n: 0.02,gyr-n: 0.015,acc-w: 0.0001,gyr-w: 1.0e-5;噪声轨迹2: acc-n: 0.04,gyr-n: 0.03,acc-w: 0.0002,gyr-w: 2.0e-5;噪声轨迹3: acc-n: 0.2,gyr-n: 0.15,acc-w: 0.001,gyr-w: 1.0e-4。我们使用evo 评估系统在三种噪声情况下的运动误差,得到了不同情况下参考轨迹与估计轨迹的绝对误差,具体数值如表1所示。不同的噪声情况得到的参考轨迹和估计轨迹如图2 所示。实验结果表明,系统估计的轨迹能较好拟合参考轨迹,证明了系统对不同噪声环境的有效性和鲁棒性。但是,从表1 的数据分析,该系统会出现残差平方和较大的情况,而本次实验的场景不够丰富,且稳定性不足,因此,该系统还有待进一步完善。

表1 不同噪声条件的绝对轨迹误差
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
科技创新与应用(2017年8期)2017-04-26 21:57:41
软件导刊(2016年12期)2017-01-21 15:17:04
光学精密工程(2016年2期)2016-11-07 09:02:26
