
地铁盾构隧道洞门环中心测量方法及应用研究
2021-04-25 05:37王超宏
中小企业管理与科技·下旬刊 2021年3期
王超宏


【摘 要】地铁盾构隧道洞门环是盾构机始发和接收的主要载体,需要精确地测定洞门环中心的三维坐标,为相关工作提供数据支撑。在工程中普遍采用的方法是在洞门环水平放置安装有管水准气泡的水准尺,采用全站仪采集其中心坐标,并利用其和洞门环的空间几何关系间接求出洞门环中心空间三维坐标。论文以青岛地铁4号线九静区间盾构始发井洞门环中心测量为例,介绍了采用全站仪实测三维坐标进行洞门环中心拟合的方法,并对两种方法的优缺点进行了比较分析,可为类似工程的测量提供有益的借鉴参考。
【Abstract】Tunnel ring of subway shield tunnel is the main carrier for shield machine to start and receive. It is necessary to accurately measure the three-dimensional coordinate of the center of the tunnel ring to provide data support for related work. The common method used in engineering is to place the leveling ruler with tubular leveling bubble on the tunnel ring, collect its central coordinates by total station, and use its spatial geometric relationship with the tunnel ring to indirectly find out the three-dimensional coordinates of the central space of the tunnel ring. Taking the measurement of tunnel ring center of shield tunnel-starting well in interval from Jiu Shui East Road Station to Jinggang Road Station of Qingdao Metro Line 4 as an example, this paper introduces the method of fitting the center of the tunnel ring by using the measured three-dimensional coordinates of the total station, and compares the advantages and disadvantages of the two methods, which can provide a useful reference for the measurement of similar projects.
【關键词】地铁盾构隧道;洞门环;圆心拟合
【Keywords】subway shield tunnel; tunnel ring; center of the circle fitting
【中图分类号】U455.43;U456 【文献标志码】A 【文章编号】1673-1069(2021)03-0194-03
1 引言
随着城市化建设步伐的加快,越来越多的城市开始修建地铁隧道,以缓解交通压力。根据施工工法的不同,地铁施工主要分为矿山法和盾构法。矿山法是采用爆破的方式开挖隧道,爆破完后需要进行初支和二衬等工序方可成型。盾构法施工是地铁隧道开挖的主要方法之一,其采用盾构机在开挖掘进的同时在其尾部安装管片,从而起到支护隧道的作用,同时将开挖的渣土从尾部排出[1]。盾构机的始发和接收都需要通过事先施工好的洞门环作为承载体,根据洞门环中心坐标与设计坐标的差值信息,来调整盾构机的空间姿态[2]。因此,精确地测定洞门环中心坐标是盾构法地铁隧道施工的重要工作。
目前,在工程中普遍采用水平尺测量法进行洞门环中心坐标的测定。该方法是将一根安装有水准气泡的水准尺放置在洞门环底部,用全站仪实测水准尺中心反射片的平面坐标,并根据水准尺和洞门环的空间尺寸关系间接求出洞门环中心的高程。该方法操作简单,便于快速计算出洞门环中心坐标[3],但其精度受多个因素影响,如反射片中心安置误差、水平尺放置误差以及洞门环自身的施工质量误差等。论文采用全站仪实测洞门环一圈三维坐标,并进行洞门环中心拟合的方法,介绍了计算原理,并与传统方法进行了比较,得出了一些有益结论。
2 水平尺测量法
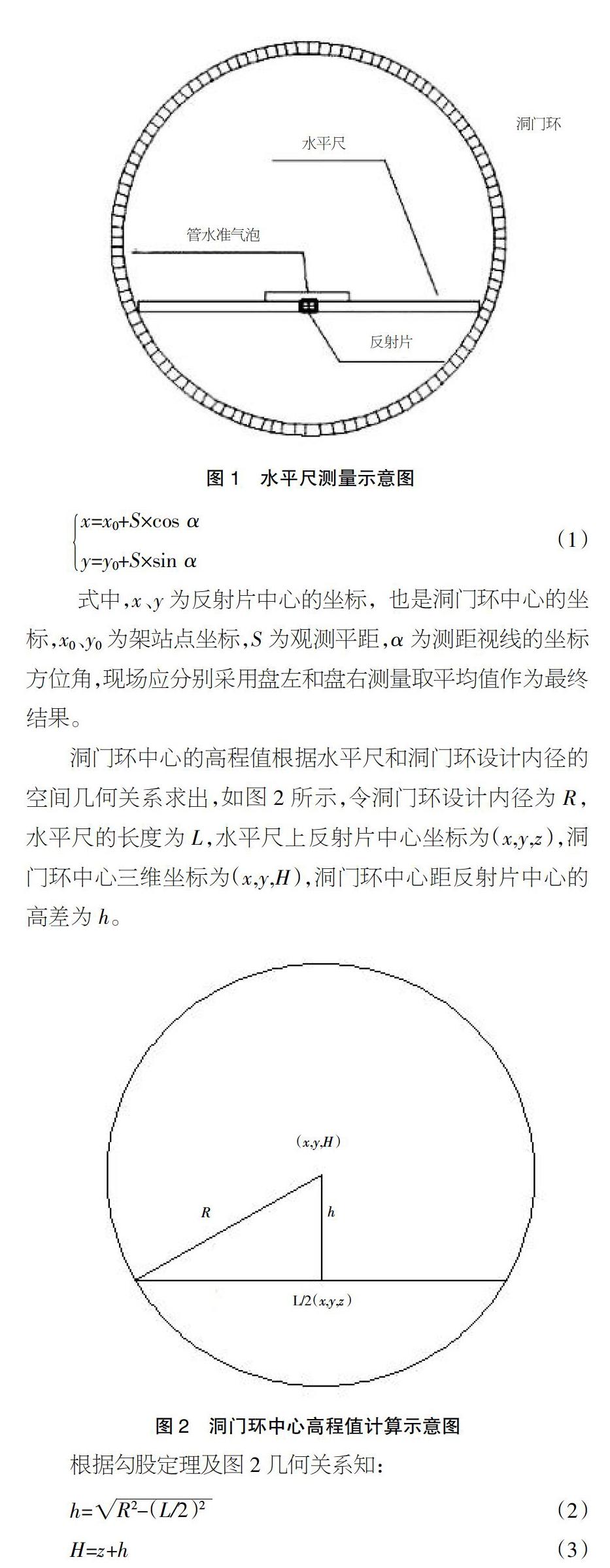
水平尺法是在一个安装有管水准气泡的水平尺正中间位置贴一个反射片,反射片的十字丝中心应严格与水平尺的中心对齐,且反射片类型应与测量采用的全站仪相匹配。测量时,将水平尺放置在洞门环处下侧,并利用水准气泡将其整平,使反射片对着全站仪的方向,其示意图如图1所示。
在车站已有控制点架设全站仪,后视另外一个已知控制点进行设站定向,也可根据现场情况采用后方交会法进行设站定向,车站内控制点应经过事先检核,确定稳定可靠,准备就绪后,用全站仪十字丝精确瞄准反射片中心,采用极坐标法测得反射片的中心坐标:
式中,x、y为反射片中心的坐标,也是洞门环中心的坐标,x0、y0为架站点坐标,S为观测平距,α为测距视线的坐标方位角,现场应分别采用盘左和盘右测量取平均值作为最终结果。
洞门环中心的高程值根据水平尺和洞门环设计内径的空间几何关系求出,如图2所示,令洞门环设计内径为R,水平尺的长度为L,水平尺上反射片中心坐标为(x,y,z),洞门环中心三维坐标为(x,y,H),洞门环中心距反射片中心的高差為h。
由此,根据反射片中心的实测坐标及水平尺与洞门环内径的设计值即可得到洞门环中心的三维坐标。
水平尺法虽可快速、方便地获取洞门环中心坐标,但其精度受多种因素的影响,如水平尺的放置,该因素主要和管水准气泡的精度有关,一般能控制在2mm之内[4]。水平尺自身长度的误差及尺子两侧的磨损是精度的考虑因素。反射片中心与水平尺中心的吻合度也是影响因素,即若反射片中心和水平尺中心严格一致,则该误差因素可忽略。但实际操作过程中,反射片是依据水平尺的标记中心人为地贴上去的,该误差一般可控制在1mm之内[5]。
此外,洞门环的实际施工误差也是要考虑的因素[6]。若洞门环是严格的标准圆形,则该误差可忽略不计,实际施工过程中,洞门环通过预制模板等方式施工,误差一般可控制在3mm左右。
3 三维坐标拟合法
研究采用三维坐标拟合法获取洞门环中心坐标的方法,即在现场采用全站仪设站定向,设站可通过车站内的控制点采用后方交会等方式,设站后沿着洞门环内径一周每隔适当距离采集一个点位的三维坐标,根据一圈的实测点位坐标拟合洞门环中心坐标。测量时,环向点间距不宜过大,若间距过大,则会影响后续的计算精度,一般根据现场情况将环向点间距至少控制在0.5m以内。
3.1 空间平面拟合
先根据实测的三维坐标拟合洞门环中心所在的空间平面,令全站仪现场采集洞门环一圈的三维坐标序列为(xi yi zi)T,i=1,2,…n。令空间平面的数学方程式为:
依据上式解算出的参数及上文中其与空间球形方程参数的关系,计算空间球心坐标和半径。
将拟合的空间平面方程和空间球形方程联立求解,即可计算出空间圆形的圆心坐标和半径。
3.3 工程实例
青岛地铁4号线九静区间左线全长1119.946m,为盾构法施工,采用上述方法三维坐标拟合的方法计算洞门环中心的坐标,采集的空间点位坐标如表1所示。
表1 盾构预留洞门采集的三维坐标
根据本文所述方法分别拟合空间平面和空间球,并联立方程,即可求得盾构预留洞门环的中心坐标为,半径为4.002m,将实测的各个点坐标与拟合中心坐标连线计算空间距离,并与拟合半径求差,即可求得各个实测点的拟合残差,将残差绘制成曲线,如图3所示。
从图3可以看出,现场实测的8个点位拟合残差大部分都在5mm之内,个别点位残差较大和现场多个因素有关,如全站仪视线的角度以及洞门环的施工质量等。为了得到更精确、可靠的结果,现场可沿着洞门环圆周多测一些点位。
4 结语
盾构预留洞门环中心坐标的精确测定是地铁盾构法施工的重要工作,在始发洞测定洞门环中心坐标,可以为盾构机安装后的始发初始空间姿态提供标定数据,在接收洞测定洞门环中心坐标,则是作为盾构机导向系统调整姿态,从而精确贯通的重要依据。目前在实际施工现场,大部分采用水平尺等方法间接求出洞门环中心的坐标,该方法虽简单易懂,但精度受多种因素影响,通常误差在3~5mm。
相对于传统方法,采用三维坐标进行拟合圆心坐标更为精确,现场采用全站仪沿着洞门环一周均匀地采集一些空间点位即可,操作更为简单,无需测量人员靠近洞门环进行作业, 其计算原理是将洞门环看作一个空间圆,该空间圆是由洞门环所在的空间平面和空间球体相交构成,基于采集点位的三维坐标分别拟合该空间平面和空间球体,即可解算出洞门环中心的三维坐标。实际操作过程中,应根据现场条件多采集一些点位,剔除相关粗差,得到更精确、可靠的拟合结果。
【参考文献】
【1】王智.地铁盾构姿态自动测量系统的研究与实现[D].上海:同济大学,2011.
【2】高春香.盾构施工中管片拟合DTA问题研究[D].武汉:华中科技大学,2004.
【3】薛慧艳,王智.基于线定向设站法建立独立坐标系的探讨及其及应用[J].测绘通报,2020(9):155-158.
【4】金剑锋,王智.罗德里格矩阵在盾构引导系统中的应用研究[J].城市轨道交通研究,2011,14(3):42-44.
【5】王智,梁显宏.超长地铁隧道区间贯通后两站一区间控制点联测方法研究[J].城市勘测,2020(1):173-176.
【6】陈平.盾构推进轴线控制技术[J].检测试验与测量,2006,6(1):107-110.
【7】王智,陈鹏,孙晓丽,等.ITRF2014至CGCS2000坐标转换方法研究及精度分析[J].城市勘测,2020(2):119-122.
猜你喜欢
工程与建设(2019年3期)2019-10-10
东坡赤壁诗词(2017年3期)2017-07-05
电测与仪表(2016年9期)2016-04-12
中国房地产业(2016年9期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
中国质量与标准导报(2014年7期)2014-02-28
河南科技(2014年22期)2014-02-27
河南科技(2014年5期)2014-02-27
城市道桥与防洪(2014年6期)2014-02-27
学苑创造·A版(2009年12期)2009-01-14
