
融合LiDAR与影像的纵横断面自动提取及应用
2021-04-25 13:34丁保才
山西建筑 2021年9期
丁 保 才
(中铁第一勘察设计院集团有限公司,陕西 西安 710043)
铁路、公路等线路纵横断面是线路走向及法线方向(或者与线路交叉成一定角度的断面)地形变化趋势的反映, 一般野外通过GNSS RTK或者全站仪实测得到,但野外测量任务量大、周期长,且线路一旦变动,其纵横断面也需重新测绘。随着机载LiDAR 技术的不断推广应用,其高程和平面所能达到的精度也越来越受业内认可,自动提取高精度纵横断面成为可能[1]。
目前基于点云制作高精度的DEM软件较为成熟,但线路纵横断面测绘除了关注地表高程变化外,还需要关注相应的属性信息,而正射影像可补充属性信息,除此之外,由于各家设计单位对数据格式要求的不同,在DEM上进行线路纵横断面提取工作目前集成程度不高,生产效率较低,因此融合LiDAR与影像数据实现线路纵横断面自动提取的方法研究对现阶段的线路测绘具有很大的实际意义[2-4]。
1 机载LiDAR点云和影像获取及预处理
1.1 机载LiDAR点云和影像数据获取
目前市场主流机载LiDAR点云和影像获取搭载的平台主要有:有人直升机、复合翼无人机和旋翼无人机,激光LiDAR也有250 m,920 m和1 350 m等不同测程,其数据采样率和频率设置均有各自特点,可以根据项目特点综合选择,获取最优的解决方案。
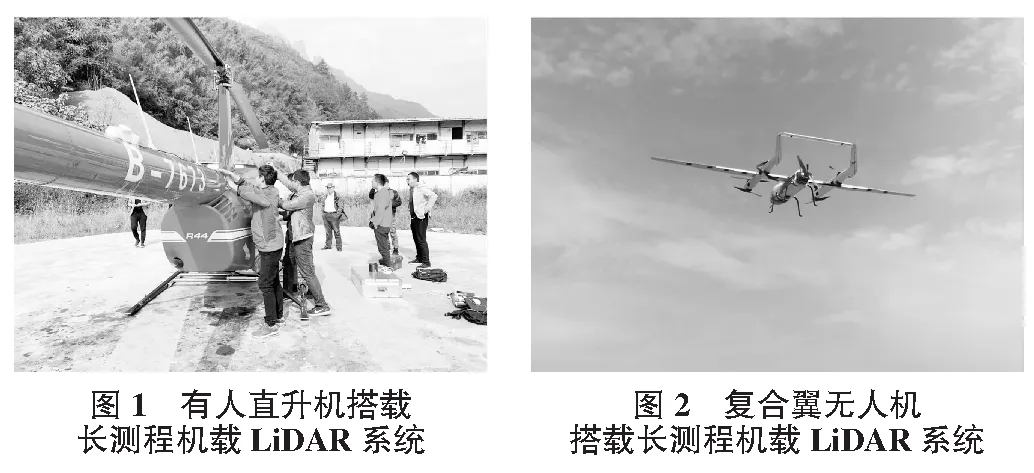
1)有人直升机集成LiDAR及影像获取。
该种作业方式适用于测区高差较大(一般认为不小于600 m)、测区风速较大、无人区等大区域的测绘,有人直升机搭载长测程机载LiDAR和影像获取集成系统(见图1),可以稳定的获取地表三维激光数据和地面影像数据,作业效率高,但是项目进场周期长、成本高。
2)复合翼无人机集成LiDAR及影像获取。
复合翼无人机航时长,搭载长测程机载LiDAR及成像系统(见图2),适用于高差不大于600 m的大范围。
3)旋翼无人机集成LiDAR及影像获取。
多旋翼无人机机载LiDAR系统(见图3),航飞时间一般30 min以内,适用于小区域的数据采集,机动灵活。
1.2 点云数据处理
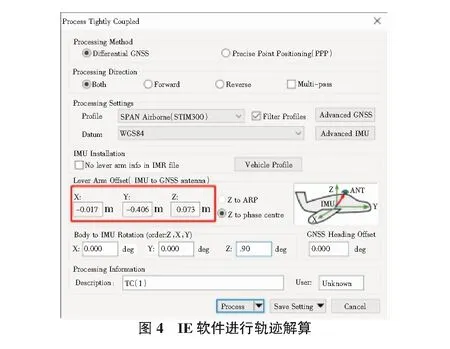
点云数据采集下载后,采用Inertial Explorer后处理软件(后简称IE)处理所GNSS,INS 数据,处理过程见图4,解算完成后可以提供高精度位置、速度和姿态信息。

采用硬件厂家提供的配套软件进行点云融合,通过坐标转换,得到当地工程坐标下的高精度点云数据(.LAS)。
1.3 影像数据处理
影像共用LiDAR系统的POS数据进行DOM数据的生产,DOM方便作业人员快速识别植被茂密地区、水系、沟坎、道路等地物边界及属性信息,在点云提取断面的基础上,提高纵横断面生产的精度。
2 融合点云和影像数据自动生产线路纵横断面技术路线
中铁一院LiDAR点云综合处理系统结合线路纵横断面测绘的特点,基于C++语言开发,从点云经过坐标转换开始,实现方式如下:
1)点云滤波及精分类:采用渐进三角网加密算法对点云数据进行滤波处理,并进行人机交互,精确分类地面点。
2)导入线路设计中线以及中桩坐标,可以通过交点法及线元法实现。
3)过中桩坐标作设计中线的垂线、法线或与设计线条成一定角度的线,得到初始断面线段。
4)断面高程计算。
a.将3)中提取到的断面线按1 cm(预设参数)等分,插入节点;
b.遍历每根断面线的节点,在三角网上其定位所在三角形,使用线性插值法内插得到每个节点的高程。
线型内插公式:
A = ((p2[y] - p1[y])×(p3[z] - p1[z])-(p2[z] - p1[z])×(p3[y] - p1[y]));
B = ((p2[z] - p1[z])×(p3[x] - p1[x])-(p2[x] - p1[x])×(p3[z] - p1[z]));
C = ((p2[x] - p1[x])×(p3[y] - p1[y])-(p2[y] - p1[y])×(p3[x] - p1[x]));
D = (0-(A×p1[x] + B×p1[y] + C×p1[z]));
p[z] = -(A/C)×p[x] - (B/C)×p[y] - (D/C);
注:p1,p2,p3分别为p点定位所在三角网三个顶点。
c.根据阈值使用道格拉斯—普克算法,对上述加密节点进行简化,保留断面线特征点。
步骤:
第一,连接断面线首尾A,B两点得到直线AB。
第二,遍历断面线节点,计算每个点到直线AB的距离,得到距离最大的点C,其到AB的距离为d。
第三,比较d与给定的特征点高差阈值,如果其大于该阈值,则该点为特征点,否则,删除该点。
第四,将AC与BC分别进行连接,分别重复第一~第四步骤,计算出所有特征点。
5)对等分点和特征点按到断面线第一个点的距离远近进行排序,得到断面线。
6)断面结合影像进行属性添加。
7)断面成果输出。
3 项目实例
3.1 项目概况
本项目位于重庆市梁平区境内,属于丘陵地区,多植被和沟渠,高差小于200 m,线路长度65.1 km,全线预计横断面8 490个,采用大疆M600搭载测程为250 m的LiDAR系统,正射影像采用大疆精灵4 RTK方式获取,全线采集点云面积及正射影像26.9 km2。
3.2 LiDAR及影像数据获取及处理
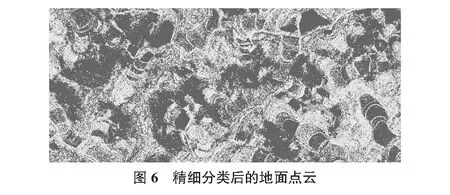
LiDAR数据获取按照1∶500精度进行设计,点密度为21.4个/m2,现场作业图见图5。数据采集完后,按照点云数据处理流程,经过各项检查后,输出精细分类后的地面点,见图6。

3.3 纵横断面成果输出
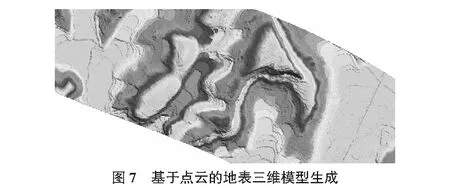
1)导入精分类后的地面点云。
把经过精细分类后的点云导入中铁一院LiDAR点云综合处理系统,并进行地表三维模型的生成,见图7。
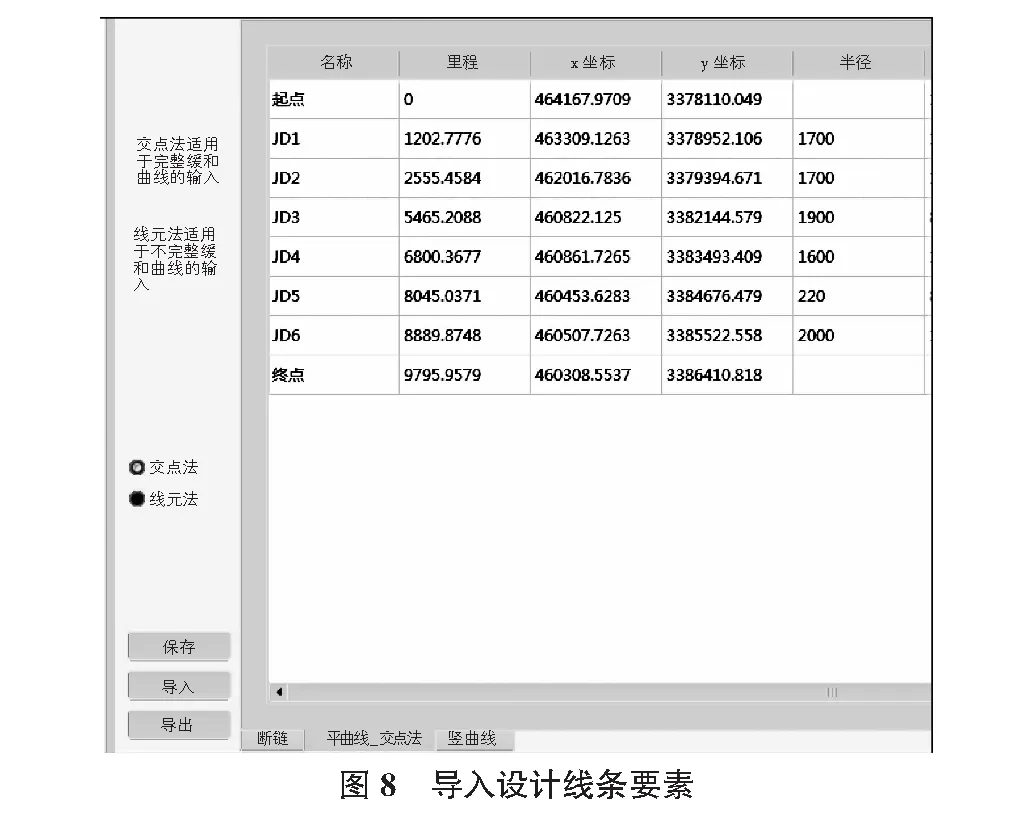
2)根据线路设计要素,使用交点法或者线元法导入相应设计要素,见图8,包括起点坐标、起点里程、直缓点坐标、缓和曲线长、半径等,作为线路纵横断面提取的依据。
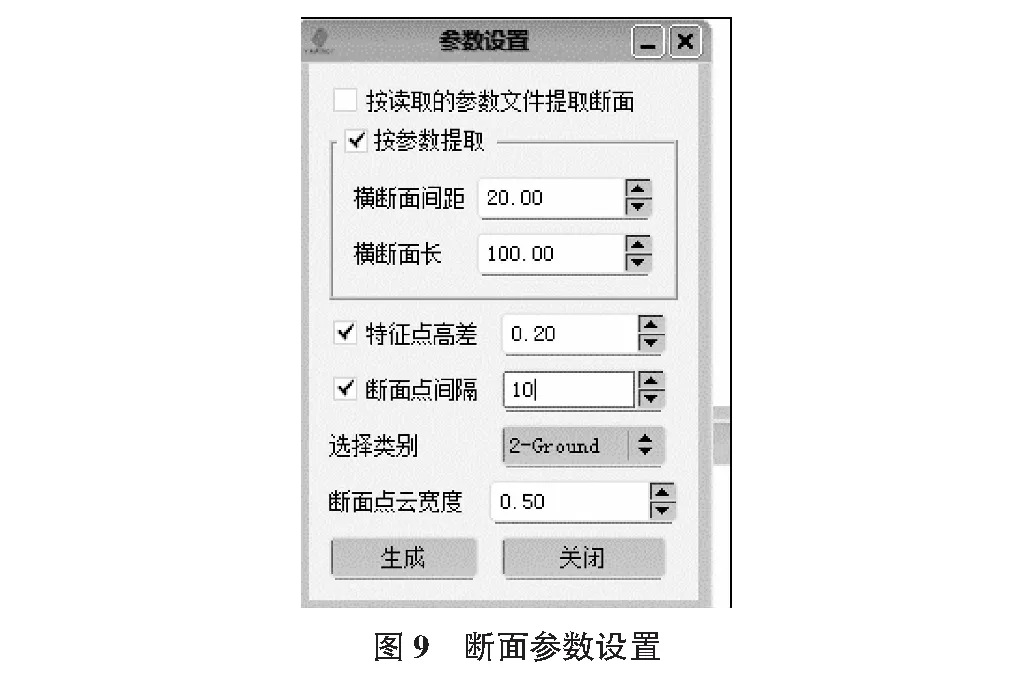
3)设置断面宽度、特征点高差及间隔,输出满足设计要求的纵横断面,见图9。
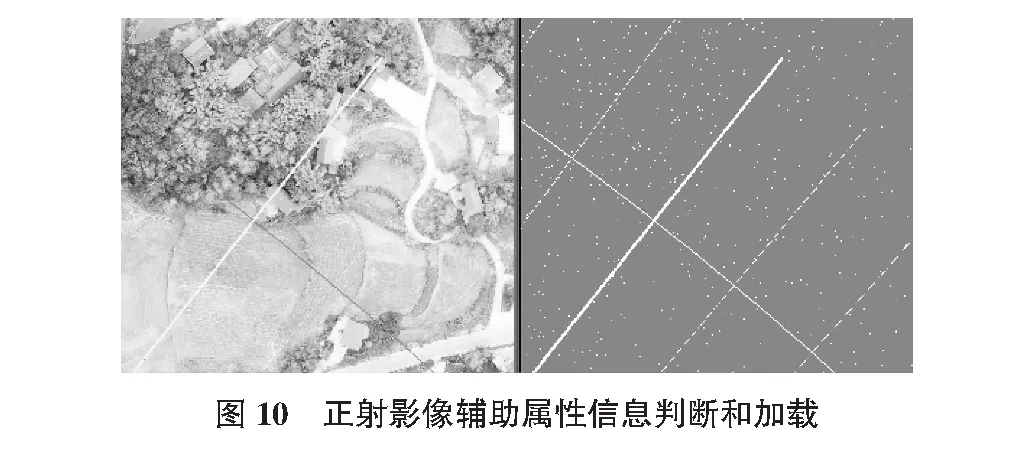
4)加载正射影像和断面数据信息,实现河流、沟渠及道路等属性信息的判断,见图10,辅助提供完整的测绘成果。
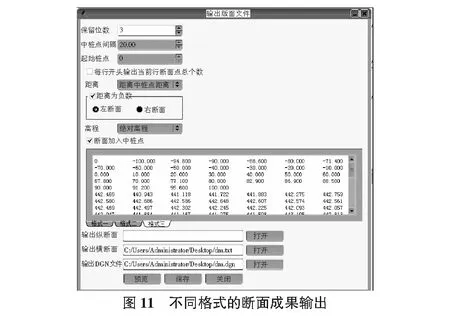
5)按照设计需求,输出纬地、铁一院等格式断面成果,见图11。
3.4 效果
1)点云平面和高程精度比对。
采用GNSS RTK方式实测覆盖全线范围的道路、稻田地、林区点位的高程点,共计7 624个,与精分类后的地面点云进行比对,结果见表1;采用全站仪方式采集房角、井盖等155个特征点平面坐标,并与点云数据比对,结果见表2。
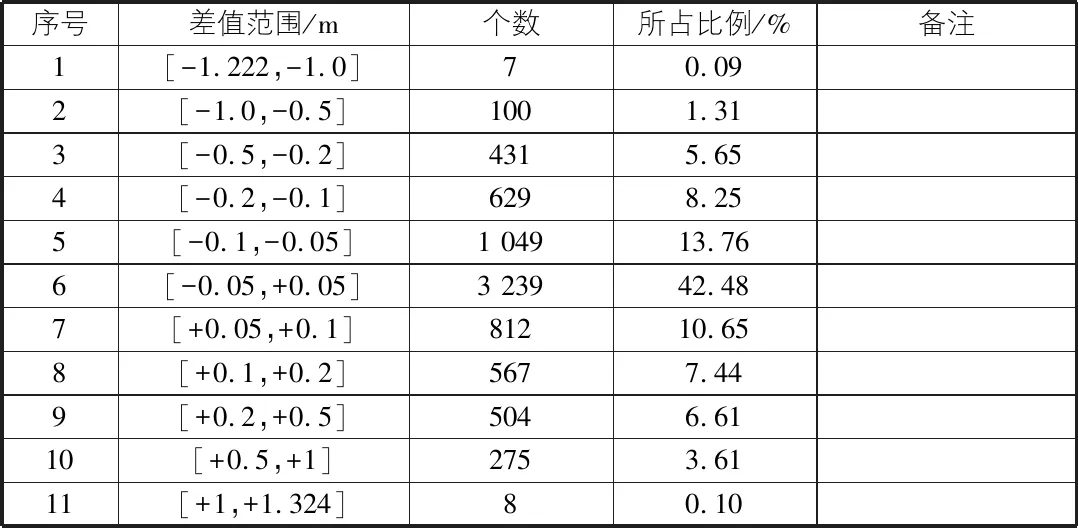
表1 点云高程精度统计表
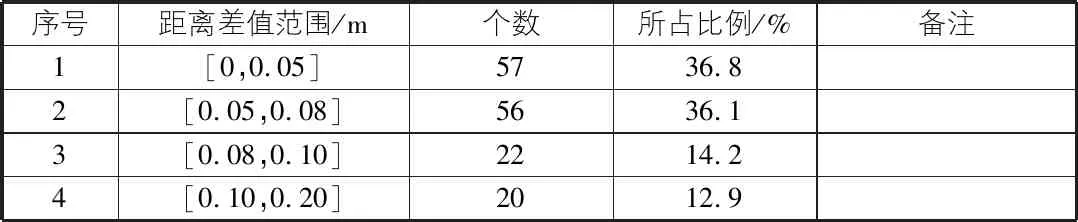
表2 点云平面精度统计表
结论:经统计本项目机载LiDAR点云数据平面中误差为±0.069 m,高程中误差为±0.124 m,满足作为线路纵横断面数据采集基础数据的精度要求。
2)横断面提取综合精度比对。
全线共布设61个横断面,实测纵断面67.1 km,全部采用GNSS RTK方式采集实测数据,根据特征点的坐标,纵横断面的平面及高程精度统计见表3,表4。
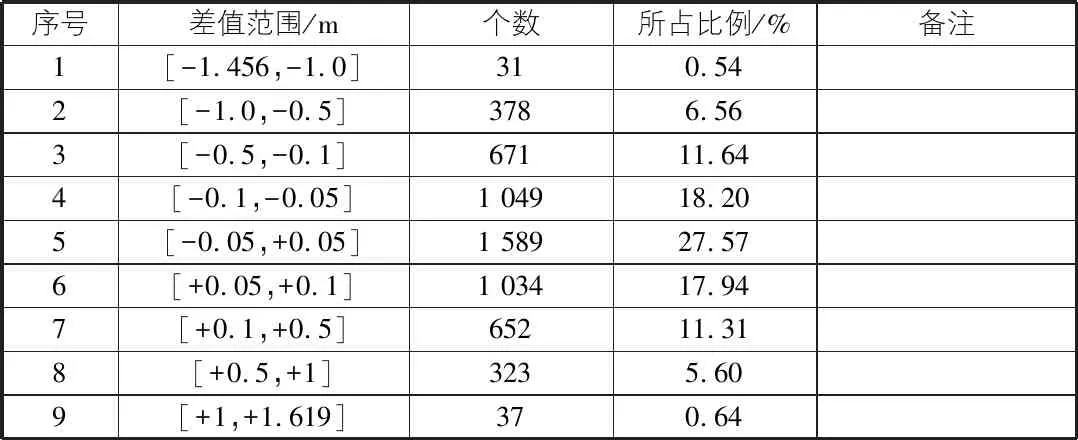
表3 纵横断面总体高程精度统计表
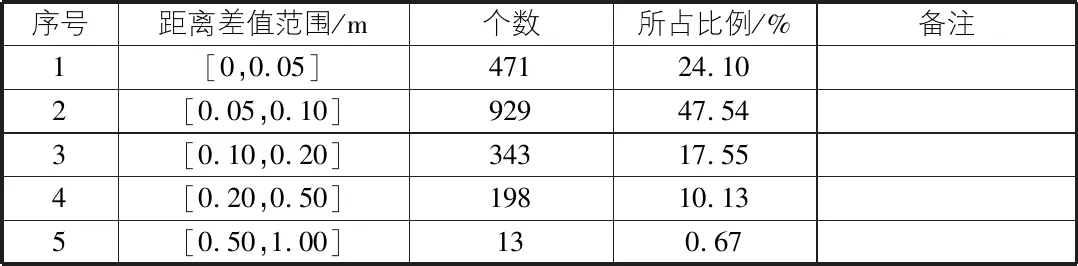
表4 纵横断面总体平面精度统计表
结论:经统计通过实测的纵横断面比对,纵横断面整体平面中误差为±0.087 m,高程中误差为±0.142 m,总体满足设计及相应规范要求,但是在植被覆盖特别严重、有植被的坎下等区域会出现高程精度比较差的点,需外业补测纠正补充。
4 结语
4.1 结论
本文提出的融合LiDAR和影像数据线路纵横断面自动提取方法,集成了线路纵横断面的自动提取、属性检查及不同格式的成果输出等功能,通过项目实测验证比对可以得到:
1)融合LiDAR与影像数据自动提取线路纵横断面的方法可以实现线路纵横断面的自动提取,并借助正射影像,实现陡坎、道路、水系及房屋等属性判别,可以实现不同格式的成果输出;
2)融合LiDAR与影像数据进行线路纵横断面提取,整体平面中误差为±0.087 m,高程中误差为±0.142 m,满足设计及规范要求;其精度主要取决于点云精分类后的精度,特别在植被覆盖特别严重、渠底、坎下等区域,精度普遍较差;
3)融合LiDAR与影像数据自动提取线路纵横断面的方法,提高了成果输出的自动化水平和集成化程度,显著提高了线路勘测的整体效率,必将成为线路勘测阶段必备的技术手段。
4.2 现阶段存在的问题
1)虽然机载LiDAR具有一定的植被穿透性,但是在植被覆盖特别严重的区域,还需要外业补测辅助线路纵横断面的成果输出;
2)如何借助分类后的点云和影像数据,进一步提高点位属性信息判别的精度和自动化水平是下一步研究的重点。
猜你喜欢
资源信息与工程(2021年5期)2022-01-15
轮胎工业(2021年5期)2021-12-26
新疆钢铁(2021年1期)2021-10-14
西部交通科技(2021年9期)2021-01-11
当代陕西(2020年23期)2021-01-07
环境(2019年4期)2019-04-20
中外公路(2019年5期)2019-01-15
——初级保健中慢性病患者的治疗依从性及相关因素的横断面研究
中国全科医学(2019年35期)2019-01-09
消费导刊(2017年8期)2018-01-18
环球人文地理·评论版(2016年8期)2017-01-19
