
沥青路面施工平整度的监测装置设计
2021-04-23 01:54:58陈钰龙周柳齐
装备制造技术 2021年12期
陈钰龙,周柳齐,吴 磊
(1.中山三生物联科技有限公司,广东 中山 528437;2.中山火炬职业技术学院,广东 中山 528436)
0 引言
截至2020年,我国高速公路通车里程居世界第一位,达到16.10 万km。沥青路面由于取材方便,工艺流程简单,路面开阔平整,能为驾驶员行车创造安全、舒适的环境等优点,所以在公路工程的运用越来越广泛[1-2]。但由于设计、原材料的质量及施工工艺等方面的原因,近几年全国建成的多条沥青混凝土高速公路,通车一段时间后都不同程度的存在路面早期破损的现象[3-4]。导致的原因之一与铺设的沥青路面不平整有关[5-7]。因此,如何设计一款能够监测沥青摊铺过程路面平整度的监测装置具有很重要的意义。
1 监测装置结构及工作原理
该监测装置主要由两部分组成,分别是图1 的监测采集终端及图2 的数据处理终端。监测采集终端用于现场数据的采集,而数据处理终端则对采集终端提供的数据进行处理。
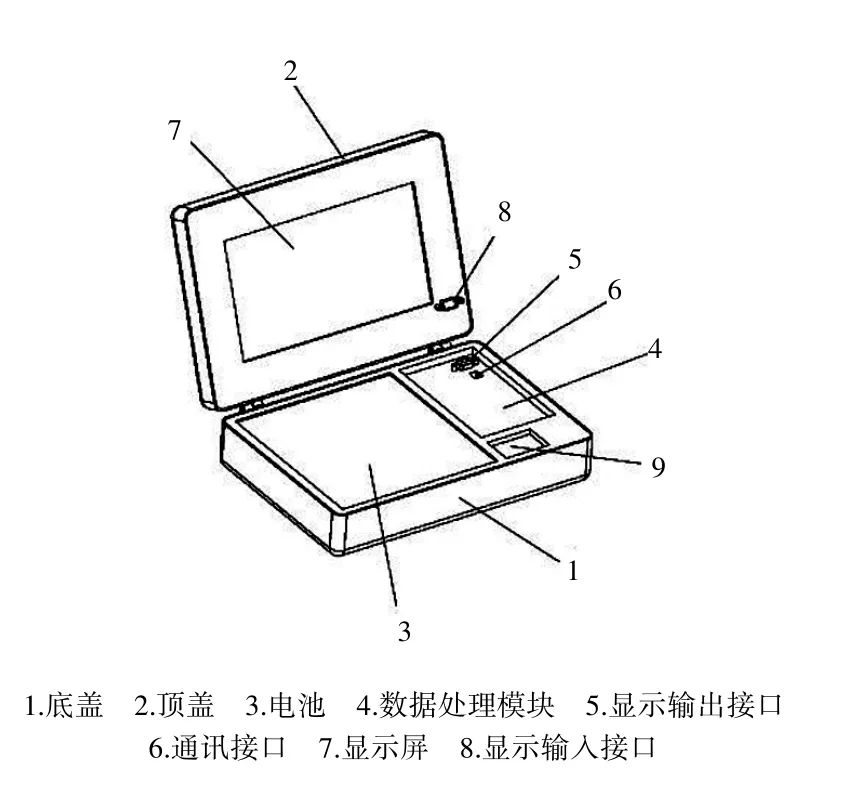
图2 数据处理终端
图1 中,监测采集终端[8]包括有可水平方向转动的第一云台电机1,第一云台电机1 与转接臂2 的一端连接,转接臂2 的另一端连接有可垂直方向转动的第二云台电机3,第二云台电机3 安装有摄像头4,摄像头4 前端设有用于测距的激光测距模块5,摄像头4 内置有陀螺仪,可以测量两个角度,分别是测量激光测距模块5 的测距轴线与竖直面之间夹角以及水平转动角。
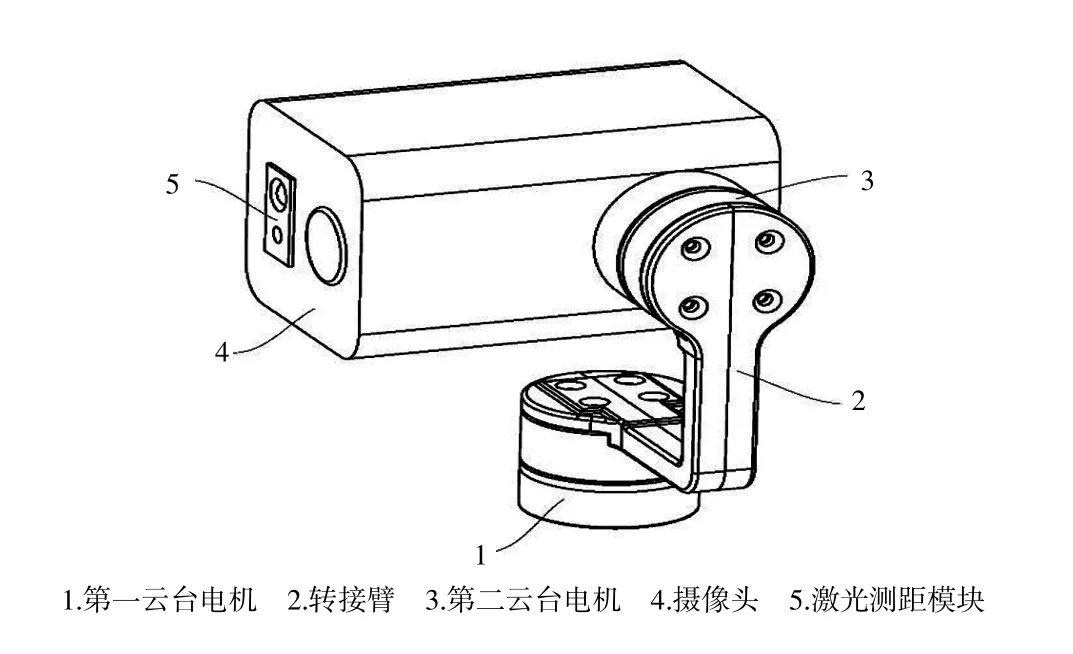
图1 监测采集终端
摄像头可以采集视频和图像数据,供数据处理终端处理后可实现实时的状态监测;激光测距模块可以测量采集终端到施工采样点的距离,提供采样点的空间距离信息,陀螺仪可以测量测距轴线与竖直面之间夹角以及水平转动角,提供采样点的空间角度信息,结合距离和角度信息就可以确定采样点的唯一坐标。第一云台电机和第二云台电机可实现监测采集终端水平360°连续旋转及垂直-135° ~135°的转动。
图2 中,数据处理终端[9]包括有包括有底盖1 和顶盖2,底盖1 上设有用于供电的电池3、用于处理并记录外部监控摄像头图像和视频信息的数据处理模块4,数据处理模块4 连接有显示输出接口5 和用于与监测采集终端连接接收视频及采集数据的通讯接口6,顶盖2 上设有用于显示数据处理模块4 处理的视频信息的显示屏7,显示屏7 连接有显示输入接口8,显示输出接口5 与显示输入接口8 之间通过数据线连接。其中,底盖1 上设有与数据处理模块4 连接用于测量底盖1 与水平面的夹角的陀螺仪模块9。
2 装置应用实施
2.1 监测采集终端的实施
本监测采集终端主要采集施工现场的采样点空间坐标,同时收集图像和视频信息作为辅助。在施工现场架设监测采集终端进行数据监测以供后台进行数据处理,监测方法包括有以下步骤:
(1)将监测采集终端架设在施工的路面上,通过后台设定第一云台电机1 依次转动设定的k个角度,分别是:β1,β2,…,βi,…βk;
(2)当第一云台电机转动到设定的角度βi后,通过后台控制第二云台电机3 依次转动到设定的m个垂直转动角θ1,θ2,…,θj,…,θm;
(3)激光测距模块5 测出在每个水平转动角βi和每个垂直转动角θj下其到路面的距离Lij。
通过上述3 个步骤就可以采集到的采样点相对于监测采集终端的唯一坐标。
2.2 数据处理终端的实施
数据处理终端主要处理监测采集终端采集的相关数据。
使用时,一方面与数据处理模块4 连接的通讯接口6 连接监测采集终端拍摄的实时视频信息及采集数据,同时利用数据线使数据处理模块4 的显示输出接口5 与显示屏7 的显示输入接口8 连接,在数据处理模块4 处理并记录外部的实时视频及数据信息,并通过显示屏7 进行实时显示;另一方面底盖1 平放在沥青施工路面上,通过陀螺仪模块9 测量底盖1 与水平面的夹角θ并发送到数据处理模块4 上,当监控检测出现沥青施工路面存在不符合施工要求的问题时,通过显示屏7 进行报警提示,其中电池3 用于分别向数据处理模块4、显示屏7、陀螺仪模块9 供电。
3 数据建模及平整度的评定
根据上述测量的过程,可以对测量点建立如下球坐标系,如图3 所示。可见,每一个点都有唯一对应的坐标(Lkm,θm,βk)。
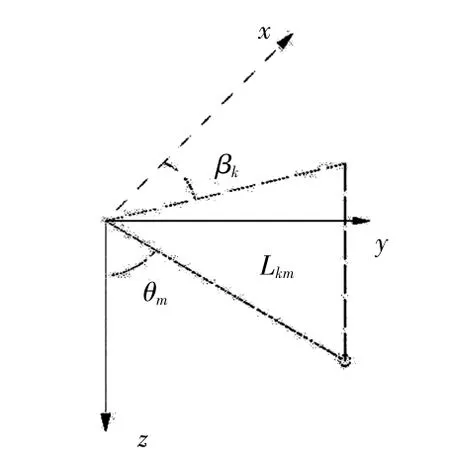
图3 测量点的球坐标系
球坐标系可以转换为直角坐标系,假设总共采集到的i=1…n个点,其中

由于每3 个点就可以建立1 个平面,如果任意选取3 个点作为基准面,则会带来结果的随意性,因此采用最小二乘法来评定施工路面的平整度。以最小二乘法拟合出1 个最小二乘平面,并且使被测平面上的所有测量点到该平面的距离的平方和为最小。根据被测平面上所有测量点相对于最小二乘平面的变动量来确定评定基准的位置,该方法能够比较准确地反映整个被测平面总的误差势态。
对于直角坐标系下的空间平面,其方程为:

假设A1,A2,A3分别是所采集的数据点的最小二乘平面对应a1,a2,a3的系数。该平面方程为

根据最小二乘法的定义,所有测量点到该平面的距离的平方和为最小。即

P值需要最小,则公式(7)分别对A1,A2,A3求偏导,并等于零,则有

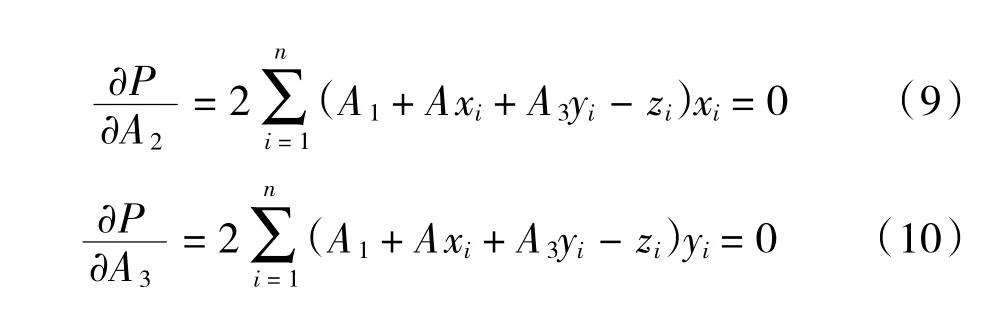
联合式(2)~(4)及(8)~(10)则可求出最小二乘平面的3 个参数A1,A2,A3。
最小二乘平面方程确定之后,利用点到最小二乘平面的距离公式,计算所有测量点至最小二乘平面的距离,这些距离值中必定存在1 个最大距离值和最小距离值,则距离值的最大值与最小值之差就是施工路面平整度的评定值。该评定值越小,则说明平整度越好。
4 结束语
本检测设备可以对现场的施工进行实时的检测,并反馈平整度结果。同时也可以给定最大的平整度评定值,对于超出要求的施工路面也可以及时报警并提醒修整。沥青路面施工平整度的监测装置设计进行展开,具体总结如下:
(1)阐述了监测装置的整体方案,分为监测采集终端和数据处理终端;
(2)对两个终端设备如何工作进行了阐述;
(3)对监测终端采集的数据进行坐标系建模,依据最小二乘法求得最小二乘平面对于的参数,并将计算采集点至最小二乘平面的距离,取其中的最大距离值和最小距离值的差值作为施工路面平整度的评定值。
猜你喜欢
现代装饰(2022年6期)2022-12-17 01:10:30
现代装饰(2022年6期)2022-12-17 01:09:42
心理学报(2022年4期)2022-04-12 07:38:02
水泵技术(2021年3期)2021-08-14 02:09:20
摄影之友(影像视觉)(2020年2期)2021-01-14 05:34:28
建材发展导向(2019年11期)2019-08-24 06:36:06
建材发展导向(2019年10期)2019-08-24 06:25:40
电子制作(2019年23期)2019-02-23 13:21:16
江西建材(2018年1期)2018-04-04 05:26:16
中国惯性技术学报(2015年1期)2015-12-19 13:12:17
