北斗星基增强系统的精确性研究
2021-04-23 01:46孙德鹏李保强
科技和产业 2021年4期
黄 晋, 孙德鹏, 李保强
(中国民用航空飞行学院 空中交通管理学院, 四川 广汉 618307)
1 北斗卫星导航研究现状及概述
星基增强系统(satellite-based augmentation system)是可以修正多种信息的系统,它的修正方式是利用卫星里面含有的转发器进行实时的信息修正。转发器使用的是信号增强转发器可以将修正的信息最终传输到用户手中。修正的信息不仅有电离层延迟导致的误差,还有卫星钟有关的误差等信息。星基增强系统的出现可以对用户部分的定位精度大大提高。
如今世界上的星基增强系统趋向于多样化,不仅仅只有美国全球定位系统(GPS),还出现了俄罗斯格洛纳斯卫星导航系统(GLONASS)、北斗卫星导航系统(BDS)[1]。卫星导航系统应用领域广且对每个国家国防安全、经济安全起着决定性的作用,每个国家都投入大量的精力研究属于自己的卫星导航系统。
中国从2000年起就抓紧时间对卫星导航进行研发,通过对卫星轨道的分析和定位精度的研究确定了定位精度采用差分定位计算,通信方面采用增强通信系统。在2020年,随着北斗三号卫星的成功发射标志着北斗卫星导航系统全球组网的完成。全球组网的完成意味着北斗卫星导航系统可以独立自主、全方位地对民航运输、气象预报等领域进行精确定位[2]。
北斗系统由以下4部分构成:
1)空间星座:此部分涵盖中地球(GEO)轨道卫星与倾斜同步轨道卫星(IGSO),分别为27颗与3颗,除此之外,还有5颗地球静止轨道卫星(MEO)。
2)坐标系统:北斗坐标系统采用的是大地2000坐标系统,它是将地球看成椭球。为了确定方向,引入了地球质心、参考极等。在此之后,通过引入长半轴、扁率等参数对椭球建立坐标系统[3]。
3)时间系统:采用北斗时(BDT),BDT采用的是不闰秒的计时方式。与此同时,北斗时与协调时(UTC)具有一定的联系,50 ns为两者相差的最大值。
4)导航电文:导航电文是用来记录导航信息的。导航电文分为两种,分别为D1与D2。通过对D1导航电文的研究,可以读出星历信息、时间同步信息。D2导航电文信息与D1导航电文的信息有相似之处,它在获得基本导航信息的基础上还能得到广域差分信息。
2 北斗星基增强系统的工作原理
北斗星基增强系统能够正常工作主要靠3种不同的部分协调运行,这3部分分别为空、地、用户。空间部分涵盖中圆地球轨道卫星、倾斜地球同步轨道卫星,除此之外,亦有地球同步轨道卫星。这3种轨道卫星缺一不可,用户接收到的报文就是由它们传送的[4]。地面端部分涉及诸多主控站、上传注入站,除此之外还含有监测站等几十个地面站。工作方式是主控站接收到由众多地面监测站组成的监测站网络发出来的导航信息及气象参数信息,然后对这些参数信息进行误差分析及处理,随后,又上传到注入站。它可以将编码好的差分及完好性信息发送给地球同步卫星。用户端部分是指接收机,卫星广播的修正信息以及完好性信息传输给接收机可以使用户实时获得修正后的数据。
3 北斗卫星导航定位精度的误差分析
通过对北斗定位的分析不难发现,在北斗卫星进行定位导航的过程中会出现误差。从误差的角度和性质上可以进行区分,有与卫星自身因素有关造成的误差,比如有卫星钟差。其次,就是外界因素的影响,外界因素对定位精度的影响最为严重。主要表现是卫星信号在传播的过程中不仅会受到对流层影响还会受到电离层的影响。最后,站在用户端的角度来看,同样也存在着因接收机的原因而形成的误差。在下文中,将对这些不同的误差通过不同的方式进行修正。
3.1 卫星钟差
卫星钟差的出现是跟原子钟的变化密不可分的,当钟时间与最精确的时间尺度存在差值时就会出现不可避免的误差。当从地面来看天上的卫星,发现卫星是每时每刻都在运动的,只有在某一刻的瞬时时间,可以获取卫星的定位结果并且定位精度在一定的范围内才会有意义[5]。
钟时间是由高性能的星载原子钟控制的,原子钟通过使用结构更加紧凑、稳定度更高的物质进行换代升级,但是它产生的钟差、频率偏移等现象不会消失。星钟误差对计算站星几何距离和解算卫星坐标具有较大影响,因此采取种差修正的方法实现卫星与接收机的同步。
地面监测站起着对卫星信号实时监测以及对卫星钟差的估计与播发。首先,定义了t为北斗时,Δt为卫星种差。表述为
Δtsv=af0+af1(t-toc)+af2(t-toc)2+Δtr
(1)
式中:af0为toc的星钟;af1为CNSS的时偏系数与星钟频率相对实际频率的频偏系数;af2为星钟频漂系数。对于一部分使用单频的用户,还要引入TGD群延迟校正值进行修正,即
(Δtsv)B1I=Δtsv-TGD1,(Δtsv)B2I=Δtsv-TGD2
(2)
通过卫星与机器之间的钟频率对比,会发现在一定情况下有频率偏移,因此需要对Δtr进行校正,即
(3)
式中:μ为地球万有引力的数值;c为光速;e为偏心率;A为长半轴;Ek为偏近点角。
3.2 对流层延迟
站在对流层的角度去考虑,它位于大气的最低层,拥有着丰富的水气质量。卫星发射的信号会被对流层中的氧气、氮气、水蒸气吸收从而产生延迟。该延迟主要是由于对流层中含有较多的中性气体和水汽,因而产生了延迟。根据性质不同可以将延迟分为干延迟与湿延迟,湿延迟的影响远远大于干延迟。如果能够根据大气的干湿情况进行更加精确的修正,将有利于提高定位误差修正的精度。由地表到对流层顶,其温度相对于高度的递减率为6.5 ℃/km;温度在平流层中可以看作常数。
ΔDtrop=Ddry+Dwet
(4)
式中:Ddry、Dwet分别是对流层中的干、湿分量延迟,对每个延迟进行计算,得

(5)

(6)
将Ddry与Dwet公式代入式(4)中得

(7)
f(B,H)=1-0.002 66cos 2φ-0.000 28H
(8)
式中:P为测站气压;T为测站温度;ew为测站的空中水汽所产生的压力;φ为测站的位置坐标(纬度);H为海拔高。
随后对式(7)进行进一步计算,得出其中的未知参数:
P=P0[1-0.000 226(H-H0)]5.225
(9)
T=T0-0.006 5(H-H0)
(10)
RH=RH0·exp[-0.000 639 6(H-H0)]
(11)
式中:P0为标准大气条件下海平面的气压,对应的值为固定值1 013.25 mbar;T0为温度,其值为18 ℃;RH0为相对湿度,其值为50%。
结合上面所述的3个公式,并将计算的数值代入下面式子,就可以得到对流层精确的延迟量:
ew=RH×exp(-37.246 5+0.213 166T-0.000 256 908T2)
(12)

(13)
由式(14)得出ΔDtrop就是卫星信号在对流层的修正的值。
4 电离层延迟模型
从电离层的角度去看,其距地球表面的高度通常在50 km以上,电离层按照字面意思就可以知道它含有海量的正负电子。当卫星发射的电磁波经过该层的时候,会与这层的电子相互作用,使电磁波的传播速率变化。路径也会产生一定的偏离。电离层所造成的误差占比最大,因为信息的传输过程都要经过电离层[6]。采取有效的方法对电离层的误差进行修正很有必要。
站在电离层角度来看,可以将其分成一个一个的小格,建立算法及模型可以有效地对电离层误差进行修正。修正过程是利用双频接收机对北斗的同一颗卫星在同一时刻不同频率来计算实时电离层延迟值,同时通过参考站与卫星的连线与电离层的交点可以获得穿透点的经度与纬度;在此以后,信息是如何传输到地面的主控站的,这主要靠地面数据链路;主控站在对格网点垂直电离层延迟值计算,由于穿透点不可能都落在格网点内,采用倒数加权法计算该网格点处的电离层垂直延迟并传输到用户端;用户端主要通过内插法对穿透点垂直延迟值进行计算。
4.1 穿透点位置计算
建立能够计算穿透点坐标的模型,如图1所示,其中穿透点(φPP,ψPP)为其坐标。

图1 电离层穿透点几何结构
A以及E都指的是参考站和卫星之间所呈的角度,第一个是方位角,第二个是仰角;Re是将地球看成一个椭球,从地心到地球表面即为半径;h表示地球表面到穿透点且与地球表面的切线呈垂直关系的距离。计算方法如下:
纬度 φPP=sin-1(sin φucosψPP+
cos φusinψPPcosA)
(14)
式中,ψPP指的是两天连线所呈的角度,这两天连线分别为参考站与地球质心以及地球质心到穿透点。

(15)

(16)
4.2 格网点垂直延迟值的计算
站在电离层延迟值角度来看,格网电离层计算出来的延迟值对其影响很大。因此,如何利用上面计算出来的穿透点的经度与纬度坐标来算格网电离层延迟值是重要的一环[7]。
双频P码接收机广泛应用在监测站,工作原理是通过P码与接收的双频f1与f2来确定电离层的延迟值。
(17)
结合式(18)可以知道,ρ1以及ρ2都是指的码伪距,一个是f1频率下的,另一个是f2频率下的,I为电离层延迟值。
电离层延迟比率可以用倾斜因子来反映。站在穿透点的角度去思考,它会接收到卫星信号的垂直入射,与此同时也会有倾斜入射,两者之间的比就是反映电离层延迟比率的。随后,引入倾斜因子来计算出电离层穿透点的垂直延迟值。

(18)
电离层穿透点的垂直延迟值:

(19)
4.2.1 反距离加权法
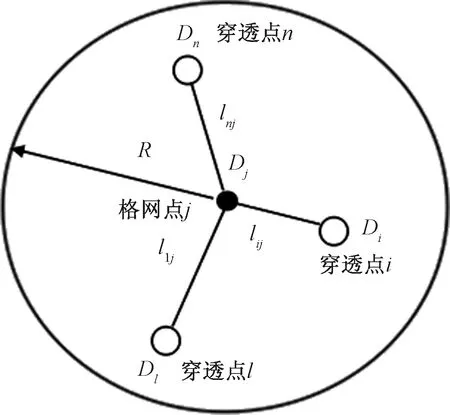
图2 格网点几何示意图
北斗卫星星基增强系统的主控站接收地面参考站传输来的穿透点的坐标信息,随后,再利用反距离加权法计算参考面内网格结点的垂直电离层延迟值。反距离加权法就是以格网点为圆心并在一个有效的范围半径R内来看穿透点,加权方式是研究格网点与穿透点之间的距离,距离越近权值越大,当超过R的有效范围时就相当于是无效点[8]。几何示意图如图2所示。计算方法为

(20)
4.3 用户端电离层延迟计算
对于用户端来说,穿透点不可能都会落在格网点上。对于用户端,采用内插法对穿透点垂直延迟值进行分析计算。下文,采用三点内插法与四点内插法对用户端电离层延迟进行研究。
三点内插法计算方法为

(21)
式中:φpp以及λpp分别指的是电离层穿透点的纬度与经度;τvi为格网点电离层垂直延迟。
依据加权函数模型f(x,y)=xy得到加权函数:

(22)
四点内插法计算方法为

(23)
依据加权函数模型f(x,y)=xy得到加权函数:
(24)
最后电离层校正延迟等于穿透点垂直延迟值乘以倾斜因子,即

(25)
4.4 数据处理与分析
选取广元、勉县、桂林、泰州、南京、盐城各参考站的数据。采样间隔为1 s,以广元(GY)与泰州(TZ)地区的电离层穿透点垂直延迟为例,对这两个地区分别采用5°×5°三点插入与四点插入进行分析。仿真结果图3、图4所示。

图3 泰州5°×5°内插结果

图4 广元5°×5°内插结果
广元与泰州10°×10°三点插入与四点插入如图5和图6所示。
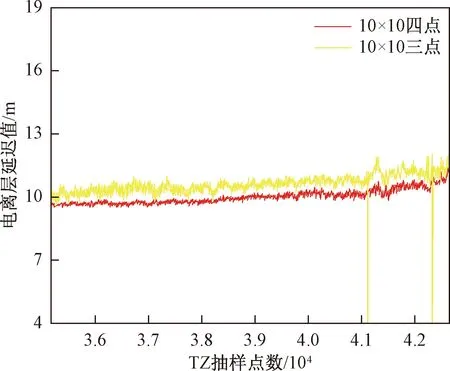
图5 泰州10°×10°内插结果

图6 广元10°×10°内插结果
结合上述的仿真图不难发现,采取四点插入法得到的电离层延迟值大部分都在三点插入法得到的电离层延迟值以下,说明相对三点插入法,四点插入法更加精确,因为其延迟值要小一些。通过比较5°×5°网格计算结果与10°×10°网格计算结果,可以发现5°×5°网格计算结果延迟值基本小于10°×10°网格计算结果。通过以上分析,四点插入法要优于三点插入法,并且网格5°×5°要优于10°×10°。
5 结论
针对北斗导航系统的主要误差进行研究,对3种主要误差源通过建立模型算法进行了校正。针对占比最大的误差即电离层延迟,首先引入了格网电离层修正方法。对于用户端,介绍了两种对穿透点电离层延迟值的修正方法三点插入法与四点插入法。同时在MATLAB环境下,对广元、泰州地区电离层延迟进行仿真实验,同时使用三点插入法与四点插入法以及网格5°×5°和网格10°×10°展开对比。通过分析仿真结果,可以得出四点插入法得到的电离层延迟值要小于三点插入法,因此四点插入法对电离层延迟值的修正要更好。通过对比选取的不同的网格,发现网格选取得越小越好。
猜你喜欢
快乐语文(2021年35期)2022-01-18
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年4期)2021-08-30
中国农业文摘·农业工程(2020年4期)2020-07-24
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
导航定位学报(2018年3期)2018-09-03
全球定位系统(2018年2期)2018-06-13
太空探索(2016年6期)2016-07-10
人间(2015年8期)2016-01-09
大地测量与地球动力学(2014年3期)2014-09-20