基于高分辨率遥感影像的森林环境多维资源动态监测方法
2021-04-22 09:01龙妙玲
农业与技术 2021年7期
龙妙玲
(昆明逸镜生态工程咨询有限公司,云南 昆明 650224)
引言
森林环境具有地形复杂性、资源多样性以及物种丰富性等特点,在自然气候条件与人文条件作用下,具有不同多维资源动态变化特征。为了得到准确的资源变化数据,大量学者及相关工作人员研究了不同类型的森林环境多维资源动态监测方法。目前监测技术发展较快,如气相色谱-原子吸收光谱联用仪(GC-AAS)等设备,都是由监测技术发展而来的。目前全球范围内的监测技术都围绕着连续性、自动性、动态性等目标进行创新。段功豪、牛瑞卿等人[1]针对监测方法的反馈效果,利用大量不同的因子作为基本指标,通过关联规则算法挖掘海量数据特征,将其作为多维动态变化的判断依据,为多维资源动态监测提供了全新的监测思路。此次研究在大量先进监测技术以及方法的基础上,结合传统方法存在的问题,引入高分辨率遥感影像,进一步优化监测方法的工作效果。高分辨率遥感影像是通过质量和数量满足一定预期的遥感技术获得的,此类图像的出现不仅对于城市规划、土地利用监测有良好影响,还为环境监测和治理工作提供更加详细的数据。
1 基于高分辨率遥感影像的森林环境多维资源动态监测方法
1.1 分类森林环境场景和目标场景
与一般意义上的图像分类不同,遥感影像分类根据像元级地物属性进行划分,以此才能实现影像分割。按照森林环境的地理属性以及生物多样性,设置不同的划分等级以及类型,利用自动化技术自动判定某个目标的所属类别以及属性。森林环境场景分类隶属于整个影像分析范畴,通过判断、注释以及标注手段,得到不同维度的环境影像划分结果。利用遥感设备获得高分辨率遥感影像,进行场景分类,根据预先掌握的目标种类标记目标的具体类别。由于不同传感器产生的遥感影像之间存在较大差异,为此当影像受日照、气候以及云雾等自然因素影响时,可采用灰度统计特征法、视觉感知特征法、模糊理论及粗糙集理论以及分形模型法等,识别目标物特征。结合识别结果选择基于中层语义建模的场景分类算法,对低层特征的目标物进行整合,利用特征与类别之间的联系,通过多局部特征融合提高分类识别率。分类后的场景中包括无数个小目标,这些目标之间的类别差异大、属性完全不同,为此需要对森林环境中的各项目标进行分类。高立兵、苏军德[2]提出的基于物联网技术的监测数据集成方法,设置一种地上与地下相关的目标分类框架,考虑地上和地下环境的不同,利用RVM进行目标分类,同时利用其极化特性细化目标类型与属性。
1.2 分割高分辨率遥感影像
对遥感影像进行分类后,依靠德国Definiens Imaging公司开发的智能化影像分析软件e Cognition分割高分辨率遥感影像。分割就是以光谱特征、纹理特征等数据为依据,将不同类型的遥感影像划分为若干组区域,以区域为单位提取影像特征,实现对森林环境的多维资源动态分析。多尺度分割是一个自下而上的区域整合处理过程,从单一像素开始,经过区域整合和限制条件约束,生成极小的像斑,再生成更大的像斑,利用潜在的优化程序,将像斑的加权异质性控制在最小值。假设像斑的尺寸用m表示,像斑的异质性用k来表示,则加权异质性的取值结果为mk。在所有像斑整合处理过程中,新像斑与原像斑异质性的提高程度,决定了不同像斑之间的整合效果。当最小的异质性超过设定的值时,完成像斑整合。通过上述分析可知,生成和整合像斑的重要属性和测度,均为像斑的异质性,因此结合现有的遥感影像分割技术,假设异质性参数为λ,则该值可通过下列计算公式获得:
λ=s1Δk1+s2Δk2
(1)
式中,s1、s2分别表示灰度和形状的权重值,2个参数的取值范围为[0,1],且2个参数之和为1,即存在s1+s2=1;Δk1和Δk2分别表示灰度和形状的变化值,2组参数通过下列方程组计算获得:
(2)
(3)
式中,b表示像斑周长;c表示像斑的外接矩周长;b′、b″表示用于整合的2个像斑的周长;c′、c″表示用于整合的2个像斑的外接矩周长。根据上述分割结果可知,异质性λ受像斑灰度、形状及其权重值的影响。根据上述分割过程,得到不同尺寸的像斑,根据分割结果建立像斑层次网络图[3]。已知像斑边界,不能超出上一层边界范围,且下一层分割的像斑边界,也要小于当前层次像斑范围。
1.3 计算环境多维特征
以像斑分割结果为前提,计算环境多维特征。选择DCNN深度学习模型,提取像斑层次网络图的全局特征和多维资源动态能力。已知深度学习模型需要大量训练参数,因此重复利用中间层计算单元,可以减少参数的体量。DCNN模型根据像斑层次网络图所示的局部稀疏特性,建立相邻两层之间的连接模式,利用权重共享减少参数,采用共享权重单元设置特征映射条件,通过池化操作法获取特征的最大值。假设前层特征图为u,滤波核为h,当卷积层为第L层、采样层为第L+1层时,第L层中第j个像斑的计算公式:
(4)

(5)

(6)
则根据上述计算结果,得到第j个像斑的卷积核h的梯度,公式:
(7)

(8)
式中,Π表示下采样系数[4]。
通过上述计算,获得环境多维梯度特征。
1.4 监测与生成森林环境多维资源动态信息
将监测区域设置为3部分,分别为外部区域、内部区域以及边界区域,其中外部与内部区域分别是无界的和有界的。根据得到的梯度特征,将简单多边形看作内部区域、边界区域的并集。森林环境遥感影像的空间拓扑位置之间,存在相离关系或相邻关系,通过叠置环境多维梯度特征,获取各自顶点坐标,建立双向链表数据结构,根据闭合多边形的节点坐标,监测相应的高分辨率遥感影像动态变化情况。森林环境多维资源动态监测流程见图1[5]。
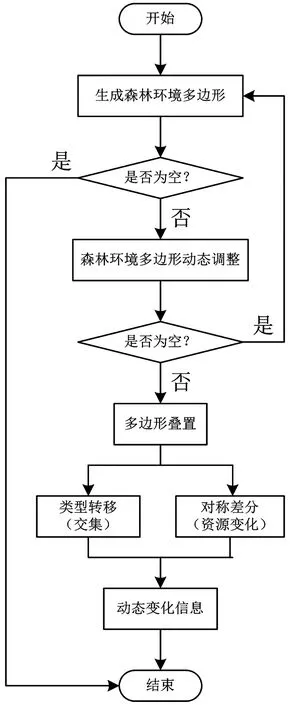
图1 森林环境多维资源动态监测流程
按照上述监测流程设置监测软件的监测算法,通过定位多维资源的动态变化数据,为监测中心提供实时环境变化数据,至此实现基于高分辨率遥感影像的森林环境多维资源动态监测。
2 应用测试
2.1 准备工作
为了检验此次提出监测方法的可靠程度和实际使用效果,搭建实验测试平台,选择一处国家级森林公园作为测试对象,代替实际野外森林环境,降低应用测试风险。将选择的森林公园随机划分成3块面积不等的监测区域,分别记为区域A、区域B以及区域C,该森林公园2020年的环境参数见表1。
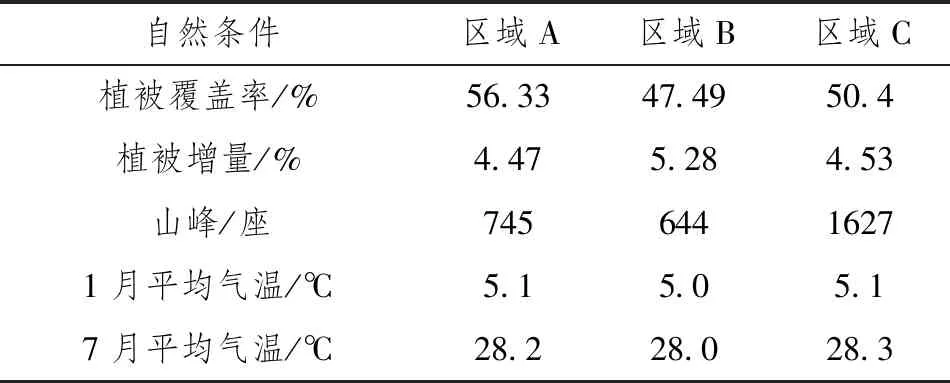
表1 森林公园基本环境参数
根据表1显示的森林公园基本环境数据可知,区域A、区域B以及区域C的基本自然条件较为相近,因此选择区域A、区域B作为基本测试环境,区域C作为备用。将此次文中研究的监测方法作为实验组测试对象,同时引入其它2组传统监测方法,并将传统监测方法分别标记为对照1组、对照2组,比较3组方法在监测反馈过程中,得到的多维资源动态变化差异。
2.2 区域A的监测数据反馈效果测试
实验的第1阶段测试将区域A作为应用环境,利用3组方法监测固定时间内,该区域的多维资源动态变化情况。为了保证实验测试结果真实可靠具有说服力度,本次实验共进行20次,第1阶段应用测试结果见表2。
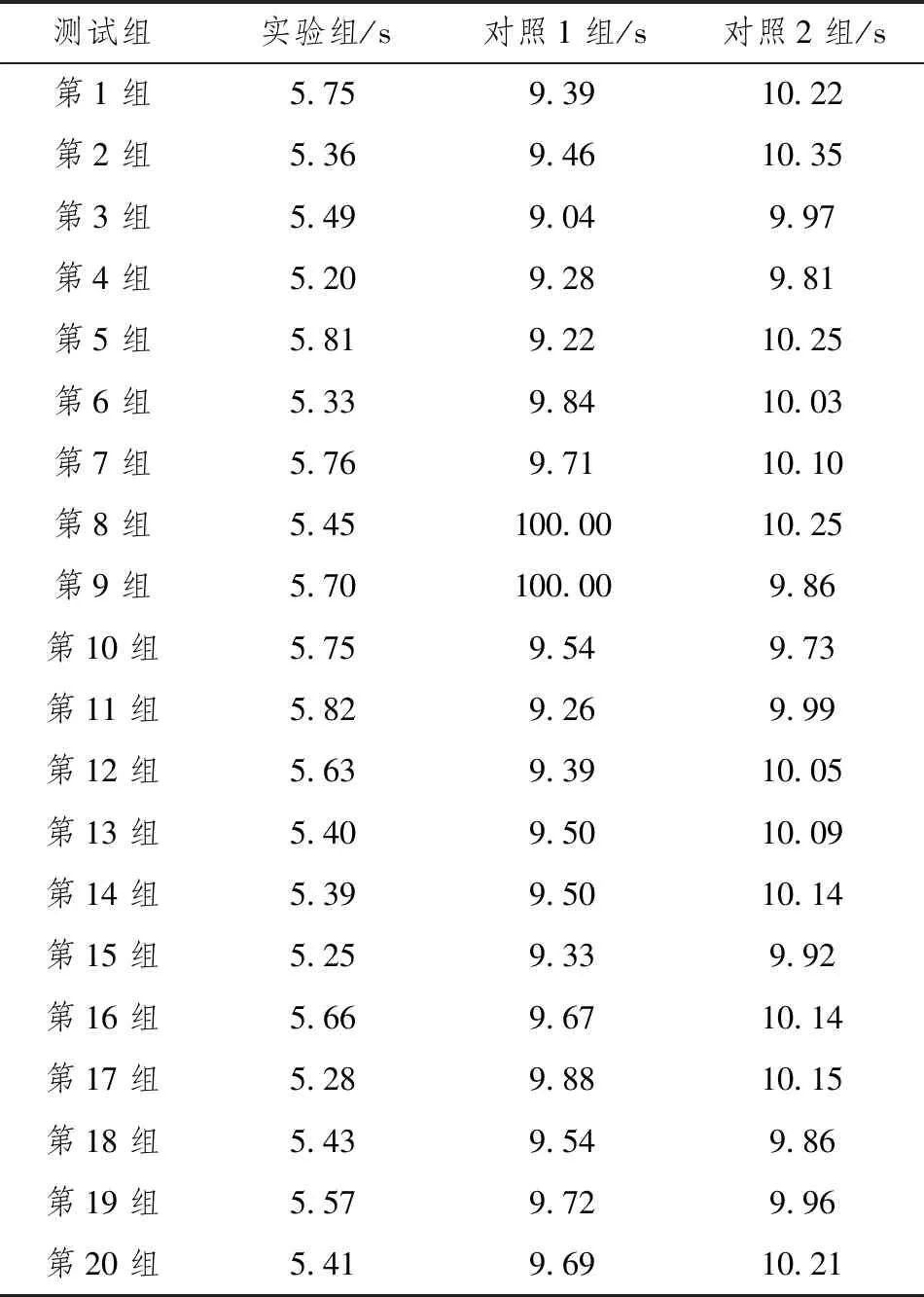
表2 区域B监测数据反馈效果统计表
根据表2显示的数据可知,实验组的反馈时间在5~6s,对照1组和对照2组的反馈时间在9~10.5s。但观察表2显示的20组测试数据发现,对照1组的第8组和第9组测试结果均为100.00s,为不正常数据。调查监测软件并找到专业技术人员进行分析,发现对照1组在进行第8组、第9组测试时,计算机突然卡顿,导致测试结果偏离正常范围。经过2轮查证对照1组的其它测试组数据正常,因此只剔除这2组监测反馈数据。计算3个测试组监测数据平均反馈用时,分别为5.522s、9.498s、10.054s。根据此项数据不难发现,所研究方法的监测数据反馈时间,分别比传统方法快了3.976s和4.532s。
2.3 区域B的多维资源动态监测效果
实验第2阶段将区域B作为应用环境,分别利用3组方法监测固定时间段内,区域B的多维资源动态变化情况,比较3组方法监测动态数据的效果。图2为第2阶段应用测试结果。
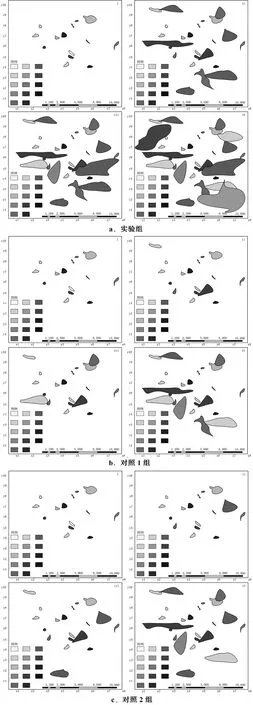
图2 区域B多维资源动态监测效果
根据图中监测结果可以发现,面对同样的测试环境,所设计监测方法的反馈速度更快,得到的森林公园资源数据更加丰富,获得了良好的动态监测效果。而2组传统方法在同样的监测时间内,由于数据反馈速度较慢,得到的监测数据不够完整,可见传统方法监测数据时的动态效果不强。综合两阶段测试结果,验证了此次文中研究的监测方法,对于森林环境多维资源,有更好的动态监测效果。
3 结束语
此次研究在明确传统监测方法的现有问题后,有针对性地解决了监测数据反馈效率,为森林环境保护工作提供了更加完整、详细的监测数据。但根据文中提出的监测过程可以看出,此方法的计算步骤稍显复杂,因此在计算时容易出现误差,影响后续计算结果。今后可以设置一个具有自动化计算功能,并能实时验证的模型,简化分割影像时的计算步骤,将误差控制在最小范围内,为森林建设与保护工作提供更精准的参考数据。
猜你喜欢
现代企业(2021年2期)2021-07-20
疯狂英语·新策略(2019年10期)2019-12-13
当代陕西(2019年10期)2019-06-03
数学小灵通·3-4年级(2017年9期)2017-10-13
作文大王·笑话大王(2017年1期)2017-02-21
作文大王·笑话大王(2016年10期)2016-10-18
作文大王·笑话大王(2016年7期)2016-08-08
邯郸职业技术学院学报(2016年2期)2016-02-27
作文大王·笑话大王(2016年2期)2016-02-24
首都外语论坛(2014年1期)2014-03-20