
地铁自动化变形监测系统数据处理方法研究
2021-04-21 06:14于晓红
设备管理与维修 2021年5期
于晓红
(中铁十九局集团矿业投资有限公司,北京 100161)
0 引言
地铁自动化监测有着广泛的应用前景。例如,徕卡公司相继开发了TCA+APS Win自动化监测系统、新一代GeoMoS自动化监测系统以及应用于德国地铁的TCA+GeoMos自动化监测系统[1]。近年来,国内研发了应用智能全站仪监测的地铁自动化监测系统[2]。其中,Leica郑州欧亚测量系统有限公司与解放军信息工程大学测绘学院合作研发的ADMS自动变形监测软件在广州地铁一号线成功应用[3-4]。我国学者进行大量地铁自动化监测的数据处理及建模可视化研究,提出把多领域、多学科融合、渗透下的自动化监测系统向数字化、一体化、智能化方向发展[5]。
对RocMos全自动化监测系统进行说明介绍,将该系统应用于S市地铁X号线第X合同段变形监测中,基于卡尔曼滤波原理对监测数据进行处理分析。证明其在工程应用的可用性与高精度。
1 自动化监测系统介绍
RocMos自动化变形监测系统由全球卫星定位导航及电子数据处理系统、多种传感器等其他系统组成[6],具有可无人职守全天候连续自动监测、远程遥控自动监测以及提前预置无需额外配置数据库等特点,各子系统一体化,方便操作,具有遇障碍重复测量的时间延迟功能。可搭配多种主流数据采集传感器,多监测模块独立,能应用全站仪望远镜小视场功能,解决了较窄环境空间内棱镜较多而不能正确辨别对应棱镜的难题[7]。并能实现自动报警和消息传递功能,可自定义图形、报告的格式并输出多种兼容的数据格式[8]。
1.1 自动化监测系统组成
该自动化监测系统由3个分支组成:数据采集、远程通信和处理分析部分[9],数据采集包括控制计算机,全站仪和待测对象。选用徕卡TM50全站仪测量机器人,视角清晰,采用四重轴系补偿系统,角度测量精度可达到0.5″,适应大多数工作环境,具有强大的自动学习测量功能和足够高的测量精度。内置目标自动跟踪装置[10]可自动识别目标,能精准照准棱镜[11]。RocMos自动化系统检测软件经过设置后可控制全站仪等测量仪器进行数据采集。
RocMoc操作箱控制数据远程传输。控制器电脑经由操作箱对数据采集系统发送指令,指导数据采集系统进行数据采集,再将数据经由操作箱传送回控制器电脑,并通过软件自动进行平差处理和坐标计算等数据处理分析工作。
数据处理分析部分,分析基于RocMos自动化监测体系预置的数据库。
1.2 地铁自动化监测系统的实施流程
计算机上安装RocMos控制软件及相应的驱动,然后将仪器与全站仪、气象传感器、RocMos控制盒子、电脑依次连接,进行软件设置。数据采集前设置控制器电脑参数,并与RocMos系统中其他部件连接,开启全站仪;对RocMoc进行仪器初始化,通过控制软件对整个系统进行测站设置、监测点位,再将结果整理。自动化变形监测系统运行流程如图1所示。在结果界面可查看监测进度,点位图中查看监测点、控制点以及设站点的相对位置;可查看报警记录、测站点的坐标变化、进行点位坐标变化图等曲线图的制作。
2 变形监测数据处理方法研究
卡尔曼滤波处理数据,尤其是波动数据。动态与观测公式组成滤波模型如下[12]:

Xk表示n维系统状态向量,Zk表示m维系统测量向量,Φk,k-1为k-1时至k时n×n维转移阵,Γk-1为n×p维噪声系数阵,wk-1为P维系统噪声向量,Hk为m×n维观测噪声阵,vk为m维观测噪声向量,w、v符合特征:

Qk是系统过程噪声wkP×P对称非负定方差阵,Rk为观测噪声vk的m×m对称正定方差阵,δkj是克罗内克函数。
Kalman滤波分预计、更新两部分[13]。前者可由目前状况估测下一刻状态,后者可依据目前监测信息对预测信息修正。以下为具体计算步骤:
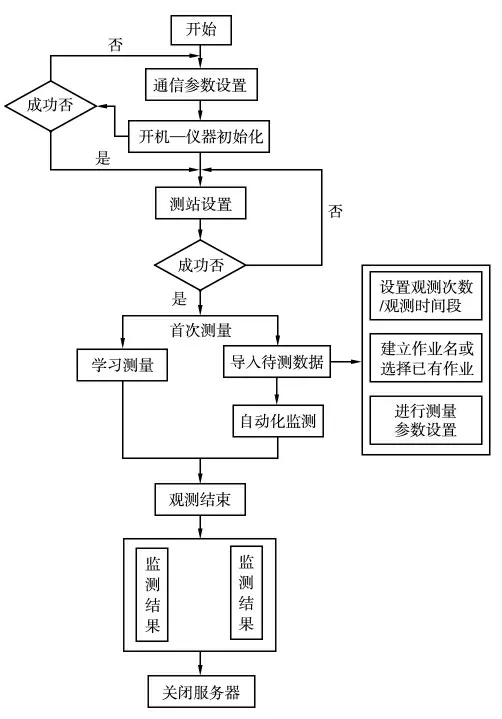
图1 自动化变形监测系统运行流程
预计分状况一步估测式(4)、观测预报值一步预计式(5)和一步预计系统状况误差方差阵式(6)。
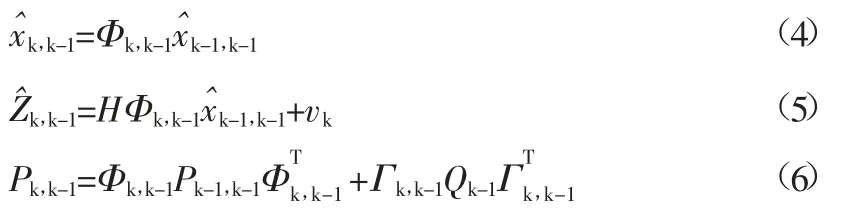
更新分为增益矩阵式(7)、状态估计式(8)和估计误差方差阵式(9)
3 应用实例
以S市X号地铁隧道自动化变形监测为例,通过MATLAB和卡尔曼滤波应用对监测数据剖析处理。
3.1 地铁变形监测方案设计
地铁变形监测方案规划涵盖监测精度划定、点位布置和自动化监测体系处理。根据建设方的标准,精度认定涵盖点位竖向、水平位移许可值,边界与报警值。监测分为监测点位布置、量测、数据操作。
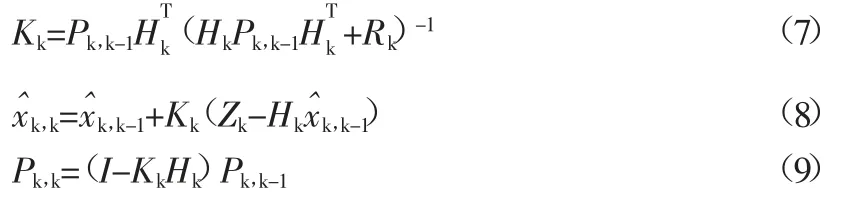
地铁X号线S站右线,规划里程为K13+682至K13+802,长度大概为130 m,设计15个监测面,同时要有一定的点位布置和监测频率密度。地铁隧道监测点布设位置如图2所示。地铁隧道监测断面如图3所示。
图2 地铁隧道监测点布设位置
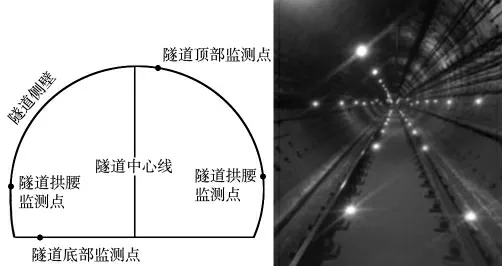
图3 地铁隧道监测断面
全部观测流程的最初基准由全站仪架设站、基准控制点组成。原则上布设平稳,避免点位变化损坏,且周围无干扰。监测网型结构必须科学,图形结构要合适。在指定点设置徕卡TM50全站仪测量机器人,根据隧道长度在轨道两侧埋设棱镜,后视定向,开始自动测量。
3.2 基于自动化检测系统的数据处理
成果处理采用RocMos全站仪变形监测系统进行差分平差计算,得出本时段的监测点的位移情况,从而反映出每个监测断面的实时变化趋势,若测点超限,系统会自动发送预警信息。
MATLAB卡尔曼滤波去噪主要内容为波分析、系数阈值操作与滤波重构,滤波函数与数据光滑度、模型自适应性有关。卡尔曼滤波工具箱去噪流程如图4所示。
应用Kalman算法滤波、预计要确定滤波初值:状态最初向量,协方差阵,动态噪声的初始、观测噪声方差阵。在实例中由RocMoc自动化监测系统计算,同时利用时间等间隔的数据进行Kalman滤波处理,系统参数为所得点三维坐标及变化速率,系统噪声为监测点速率瞬时变化。
4 数据分析
自动化监测体系以图形形式将点位变形趋势实时直观化,察看趋势把握监测变形信息。绘制变形量—时间的曲线,分为变形速度、累计位移、收敛累计位移与时间的曲线等,实时展示的数据信息可随时反映地铁监测动态。
以随机选取的监测点M为例,统计监测值横、纵向位移的累积变化量。监测折线图如图5所示。
由图5观测数据500期,点位变形均在(-1~1)mm,未超过累计位移限值,总体沉降位于可控限值内,但是产生不均匀沉降,可能对周边建筑物造成影响,因此需要采取适当的保护措施。基于MATLAB的Kalama滤波去噪操作,对监测点位位移状态估量。将变形量设为-0.3 mm。卡尔曼滤波直接处理监测点水平位移数据前后变形曲线如图6所示。
图6中,滤波值由发散过度至逐步收敛并独立与初值、后期变形趋势大体符合。426期后,两种数据偏差较小,可修改再次拟合;Kalman滤波弥补原数据的系列误差,观测数据平滑。监测点M滤波残差见表1。
从表1知,滤波后监测点X、Y方差为:0.0217,0.0205,小于原始方差。图中看出,滤波值和原始数据趋近相同且更光滑,表明监测数据变化情况可拟且稳定。监测点1~480期X、Y、Z轴位移速度和趋势线变化如图7所示。

图4 卡尔曼滤波工具箱去噪流程
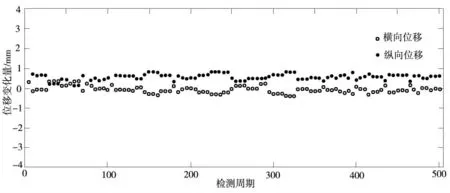
图5 监测点M位移
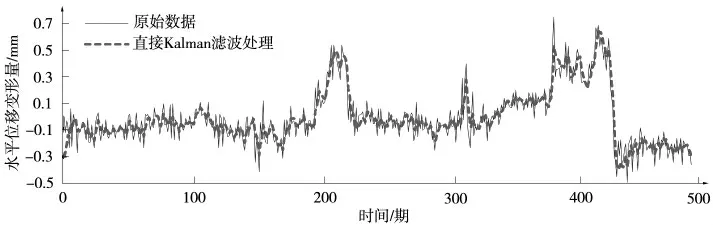
图6 卡尔曼滤波直接处理监测点水平位移数据前后变形曲线

表1 监测点M滤波残差
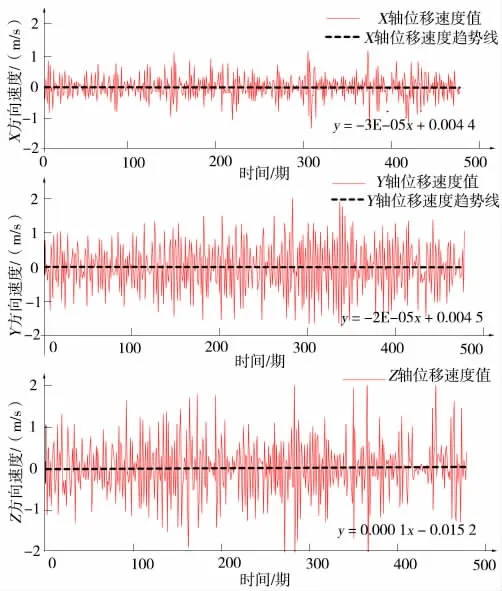
图7 监测点1~480期X、Y、Z轴位移速度和趋势线变化
由图7可知,监测点坐标3个方向的位移速率均保持在0附近,无特殊变化。介于监测对象为施工中的地铁,由此得变形动态性弱,速度缓慢。
5 结语
通过应用RocMoc全自动化监测系统,基于卡尔曼滤波,对监测数据处理分析,证明Kalman方法在地铁自动化变形监测可靠性,能达到确保工程、经济安全,施工方法合理的目的。
自动化监测系统保障地铁安全运行。同时,利用Kalman滤波对形变去噪,可满足精度要求,并具有相应的预测功能。这具有非常重要的现实意义,更能满足现代地铁建设对监测工作的要求。研制契合国内适用的自动化监测系统,保障自动化监测发展,为经济高速发展供应源源不断动力。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
新型工业化(2022年5期)2022-06-17
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
初中生世界·九年级(2017年10期)2017-11-08
