
一种基于多任务学习的微多普勒目标识别方法
2021-04-20 02:56李雨鑫罗丁利陈尹翔
火控雷达技术 2021年1期
李雨鑫 罗丁利 陈尹翔 杨 磊
(西安电子工程研究所 西安 710100)
0 引言
随着自动驾驶和智慧城市的发展,人们对各种环境下目标检测分类的需求也越来越大。与光学传感器相比,由于雷达在全天候多环境下工作的特性,使其广泛应用于智慧城市和环境监测等领域。然而,在雷达目标分类领域,由于数据采集成本高和雷达形式参数多样,难以针对每一种雷达采集大量数据来训练出一个高性能神经网络。多任务学习[1]方法,可以利用不同的任务之间的相似性来提高模型准确率,从而解决微多普勒目标分类任务中数据不足和运算量受限的问题。在本文中,我们设计了一种共享特征提取器的多任务学习方法,神经网络可以同时完成微多普勒单兵小分队任务的区分和三种飞机的分类任务。通过这种方法使深度神经网络模型在微多普勒分类任务中获得更好的准确性和鲁棒性。
1 多任务学习
对于深度学习方法来说,获取高性能模型的前提是大量数据,数据不足会导致模型精度低,过拟合现象[2]严重,使模型难以在实际环境中使用。微多普勒[3]目标分类任务主要利用目标运动过程中不同部位速度不同的特点,通过对目标的连续跟踪,得到目标不同部位速度随时间变化的频谱。由于多数雷达都具有速度测量功能(虽然某些雷达速度模糊会很严重,导致大量速度成分混叠),因此使用微多普勒频谱作为输入进行目标分类具有非常广泛的应用。近年来,多任务学习在模式识别领域中非常活跃,在Sanh[4]的工作中将不同难度的任务划分为不同层次的输出,通过从多个任务中提取不同深度来学习更鲁棒的特征表示。在Bischke[5]的工作中,任务是在卫星图像中识别建筑物的屋顶,采用多任务学习框架,将图像中物体高度的任务作为辅助任务,以提高主任务的识别性能。许多任务也使用遥感图像作为输入,但对于作者所面临的主要任务,使用物体高度估计的辅助任务会有较好的效果。在Liu[6]中,使用硬参数共享[7]对共享编码器进行训练,然后使用该方法的私有神经元将任务分开进行分类,该方法在多任务学习领域中被广泛使用。
2 网络结构
2.1 微多普勒
多普勒效应被广泛应用于雷达系统的各个部分。雷达发射一组固定频率的电磁波照射目标,接收目标反射回波。当目标沿雷达的径向移动时,接收到的回波会发生频率变化。雷达利用此频率变化确定目标的速度(fd=2v/λ,其中fd表示多普勒频率变化,v为目标速度,λ为信号波长)。在目标运动的过程中,不同部位的速度会有所不同。例如,人在行走时胳膊和脚的速度波动范围比较大,并且有周期性的变化,躯干的速度波动比较小。这种由目标本身不同部位的速度变化引起的微多普勒频率变化是雷达目标识别的重要特征之一。当目标信噪比和雷达多普勒分辨率满足条件时,通过对目标进行连续照射,记录目标微多普勒谱随时间的变化,得到微多普勒谱。
2.2 网络结构
给予两个微多普勒目标分类任务,首先输入两个微多普勒频谱,之后对送入一个共享参数的BLSTM特征提取器,特征提取器输出的结果分别送入两个任务私有的神经网络中进一步特征提取和非线性映射,最终通过Softmax分类器进行分类。详细网络结构如图1所示。
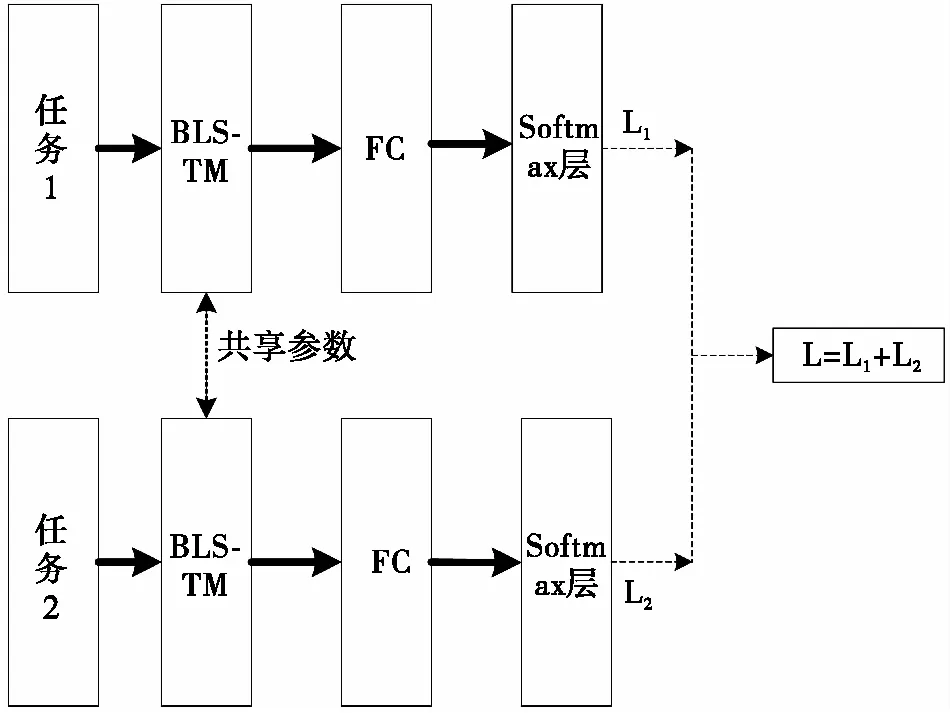
图1 与传统模式识别方法对比
通过这种特殊设计的网络结构,在训练过程中,BLSTM特征提取器由两个任务产生的梯度共同优化,这种方式有效的提高了其特征提取能力,同时由于参与训练的数据增多,比起单独任务训练一个模型,这种方法可以使特征提取器更加鲁棒。在经过特征提取器提取特征之后,两个不同任务提取出的特征分别送入不同任务私有的全连接层,这种方式可以使模型针对不同任务的特点训练模型参数,从而在单个任务上有更好的表现。
2.3 损失函数
对于标准的分类问题,我们采用了大多数分类工作都会使用的Softmax交叉损失熵损失函数。给定神经网络输入x=(x1,x2,x3,…,xk)和标记y=(y1,y2,y3,…,yk)可以得到目标损失函数为

在多任务学习框架下,两个任务分别输入数据和标记,可以通过损失函数计算出每个样本的损失,分别记为,在进行参数优化时,使用总的损失函数来优化模型。对与BLSTM特征提取器,模型参数受两个任务的梯度共同优化,私有全连接层部分受自身任务损失优化。
3 实验结果
在本次试验中我们使用了两种微多普勒数据集:一种是针对单兵、小分队的二分类问题,针对第一种数据,我们使用Ku波段脉冲雷达对目标进行数据采集,对回波进行512点积累最终通过提取目标所在距离单元的微多普勒数据,单人数据有1400帧数据,小分队数据有1300帧数据,对上述数据选取70%作为训练集,30%作为评价集。另一种采用三种飞机分类任务,数据集包含直升机、喷气式飞机和螺旋桨飞机,三种类别数据量均在1300帧左右,其余设置与任务一相同。
为了验证我们提出方法的效果,我们首先对比了传统分类方法,包括KNN,随机森林,使用SVM对PCA降维后的特征进行分类等方式,具体对比结果如表1所示。由表1可得,我们提出的方法对比传统方法具有极高的优势。为了更具体分析我们提出的多任务学习方法对主任务的帮助,我们使用了一个与多任务模型具有同样结构的单一任务模型做为Biseline。通过实验表明,在相同网络结构的情况下,使用多任务学习方法将对提高准确率有很大帮助,并且这种多任务学习方法在部署应用时,并不需要部署多余的辅助任务部分,这意味着我们使用和Biseline同样的算力和存储空间,得到了更高的准确率。

表1 与传统模式识别方法对比
为了进一步验证我们方法的性能。我们首先将我们的方法与传统深度学习方法进行对比,包括基本的BLSTM,LSTM和RNN模型,以及被广泛使用的VGG 16,RestNet 50,Inception V3等。对比结果见表2所示,我们对比了4,32两种微多普勒帧长的情况,由于较少的帧数难以提供足够的有效信息,所以大多数情况下小帧数时的准确率要小于大帧数情况。通过对比,我们提出的方法优于传统深度学习方法。同时,在一些迁移学习工作中,使用在ImageNet上训练过的模型参数,使用微调的方法对微多普勒数据进行分类,我们对比了使用上述三种网络微调的方法处理微多普勒任务。通过表2中,VGG 16 fine-tune,RestNet 50 fine-tune,Inception V3 fine-tune的结果可知,同样的模型使用微调的方法训练准确率有一定提升,然而由于特征空间的巨大差异,这种方法难以达到更好的效果。我们的方法对比这一类方法具有更高的准确率。最后,我们对比了几种针对微多普勒分类任务特殊设计的分类方法,这一类方法包括DivNet[8],Mo-DCNN, VMo-DCNN[9]。通过试验结果可以看出,这一类方法准确率低于我们的方法,尤其在小帧数情况下,我们的方法准确率远高于这一类方法。
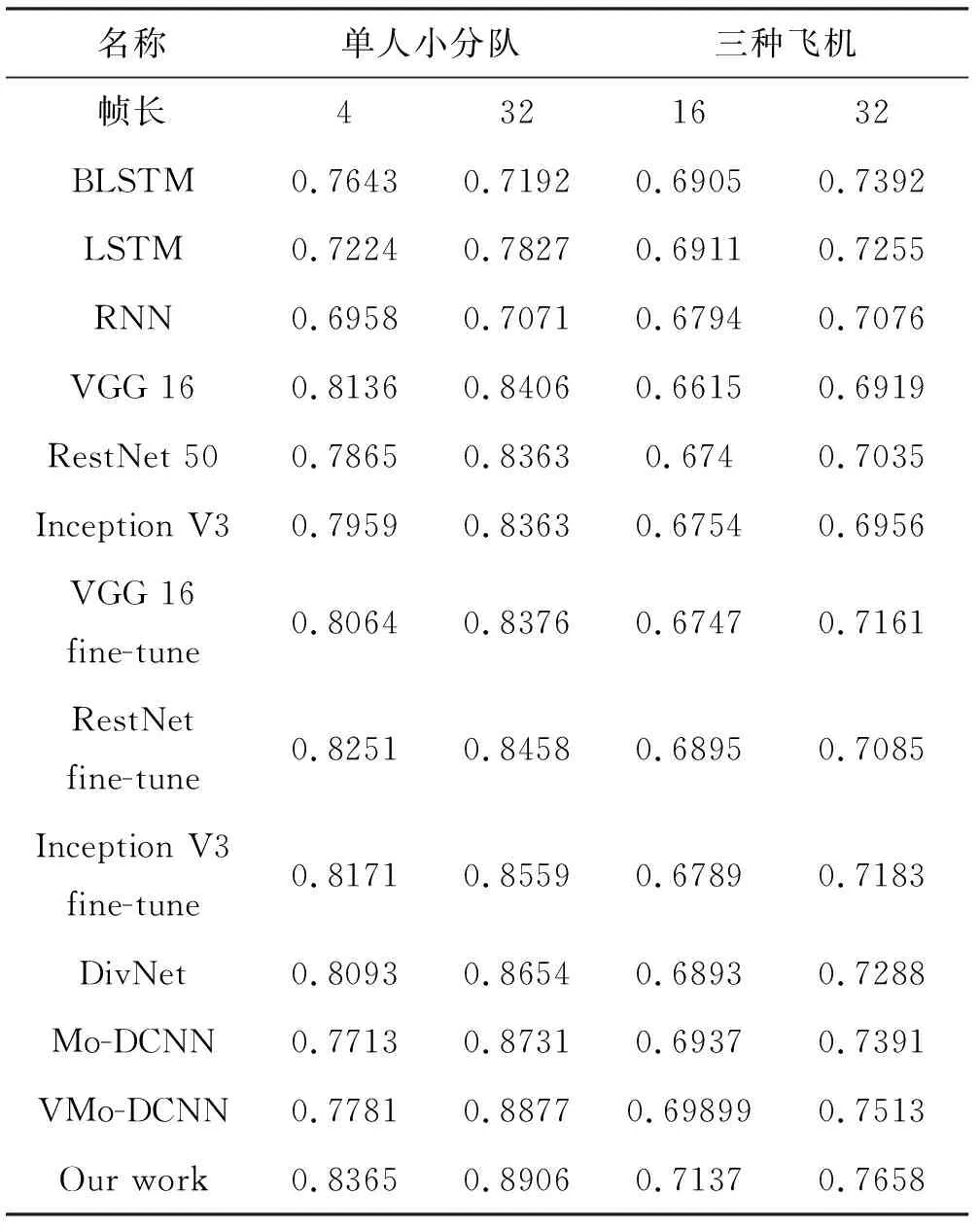
表2 与深度学习方法对比
由于雷达所对应的应用场景大多需要极高的相应速度,在有限的时间内如果不能给出相应将会造成难以挽回的损失。所以一个应用于雷达的模型识别方法对计算速度有着更高的要求。为了验证我们模型的规模,我们在相同的试验环境中使用参数数量,FLOPs和运算时间来衡量我们模型的规模和实时性。对比的工作包括VGG16,Inception V3 和RestNet 50这一类广泛应用的网络模型,以及DivNet[8],Mo-DCNN,VMo-DCNN[9]这一类针对微多普勒分类任务专用的方法。通过表3可以知道,我们的方法在这三项指标中优于上述大部分模型,在与Mo-DCNN,VMo-DCNN的对比中,虽然我们的模型参数数量略大于这两种方法,但FLOPs和计算时间要远小于这两种方法。通过上面的对比,我们的方法在计算量和计算时间上具有一定优势,这有利于本地部署和实际应用。
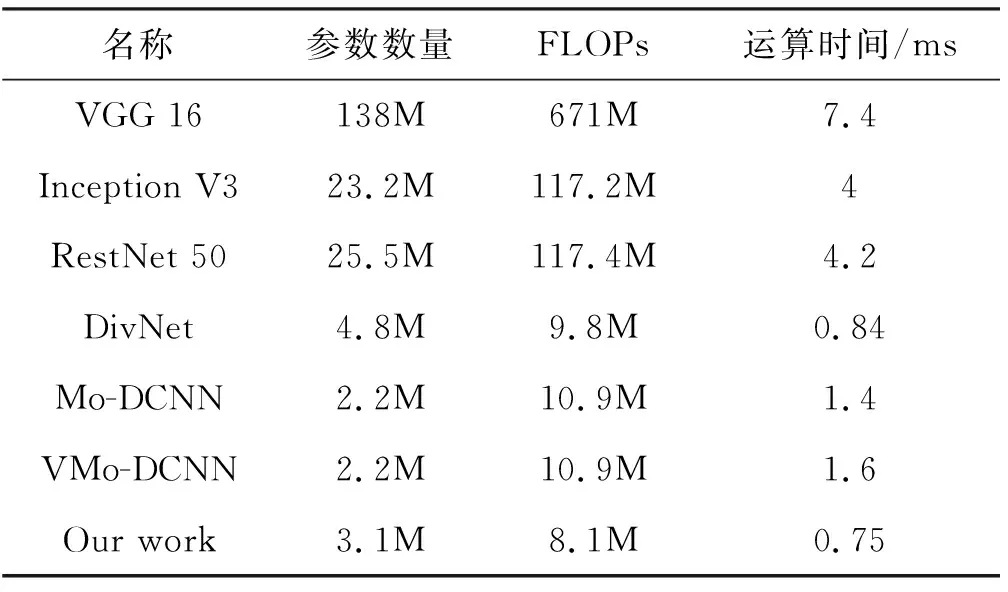
表3 运算量对比
4 结束语
人工智能现如今已广泛应用于人类生活的各个角落,雷达作为一种重要的传感器,虽然有大量使用经典方法的模式识别工作[10],但是在深度学习方法上的发展远弱于计算机视觉,自然语言处理等领域。由于雷达探测方式和特征空间的不同,人们需要针对雷达的特点有针对性地设计模型训练方法和相关算法,从而提高雷达系统的智能化识别能力。
猜你喜欢
应用心理学(2022年5期)2022-11-05
导航定位学报(2022年5期)2022-10-13
北京大学学报(自然科学版)(2022年1期)2022-02-21
北京航空航天大学学报(2021年9期)2021-11-02
现代信息科技(2021年21期)2021-05-07
电机与控制学报(2018年9期)2018-05-14
计算机应用(2016年10期)2017-05-12
中国新技术新产品(2016年23期)2016-12-26
物理教学探讨(2014年5期)2014-09-18
