
基于运维平台的监视源信号分析研究
2021-04-20 02:36崔品品
电子技术与软件工程 2021年1期
崔品品
(民航中南空管局空管设备应用技术开发实验室 广东省广州市 510000)
1 引言
广州区域管制中心使用的自动化系统为THALES 欧洲猫自动化系统,欧洲猫(EUROCAT-X V5)系统是法国THALES 公司生产的具有国际先进水平的多雷达处理系统,可为管制员提供雷达目标显示和飞行计划处理。目前该系统是广州区域管制中心自动化主用系统,是最重要最核心的设备。
航管自动化系统是一个配备了能够同时处理多路雷达信息的雷达数据处理模块、监视飞机航迹的显示模块、可同时处理大量飞行计划的飞行数据处理模块的大型系统,可以预测空中飞机可能发生的中短期飞行冲突,并对违反限制空域、危险空域规定的各种飞行情报提供服务。
多雷达信号分析系统系单位自行研发,用于对自动化系统单路航迹和融合航迹进行解码显示
运维平台系面向空管设备体系各单位的设备运行维护信息化管理支撑平台。包括电子值班、维护维修、设备资源管理、人员管理、知识管理、统计报表、设备运行风险评估、安全绩效等功能模块。是通信导航监视运行支持系统的组成部分,实现局直设备运行单位与分局(站)本地的设备运维信息化管理。
2 系统架构应用
自动化系统的雷达航迹是多雷达的融合航迹,当单部雷达出现故障时,将会导致自动化系统出现目标分裂、跳变、假目标等,影响安全运行。在EUROCAT 自动化系统中,增加了E-FEED 数据网关,用以实现对外部系统的数据输出,E-FEED 数据网关可输出EUROCAT 系统融合雷达航迹。
多雷达信号分析系统利用E-FEED 数据网关输出的实时航迹,对融合航迹进行解码及显示,并最终获取更新该航迹的雷达源,进而快速定位造成目标异常的监视源,此外,该系统同时具备监视源数据回放功能,对于事后查找监视源异常情况带来了极大的便利。其硬件连接方式如图1所示。
下面通过一则案例分析来说明一下该系统的使用场景:
案例:2019.2.24 19:11 分,管制员报告技术部门,武汉上空多次出现目标分裂/????假目标,持续2-3 周期后消失。
一线值班人员接到管制异常情况报告后,确认未对管制造成工作方式改变方面的影响。技术人员马上针对此情况进行分析。分析过程包括:在欧洲猫自动化系统进行情景重放,如图2所示。
通过分析定位确定好情况,然后在多雷达信号分析系统中进行融合雷达信号重放,选定回放时间,回放开始后,在分裂位置定位目标,进而定位产生目标分裂的监视源信号。如图3所示。

图1:多雷达信号分析系统硬件连接
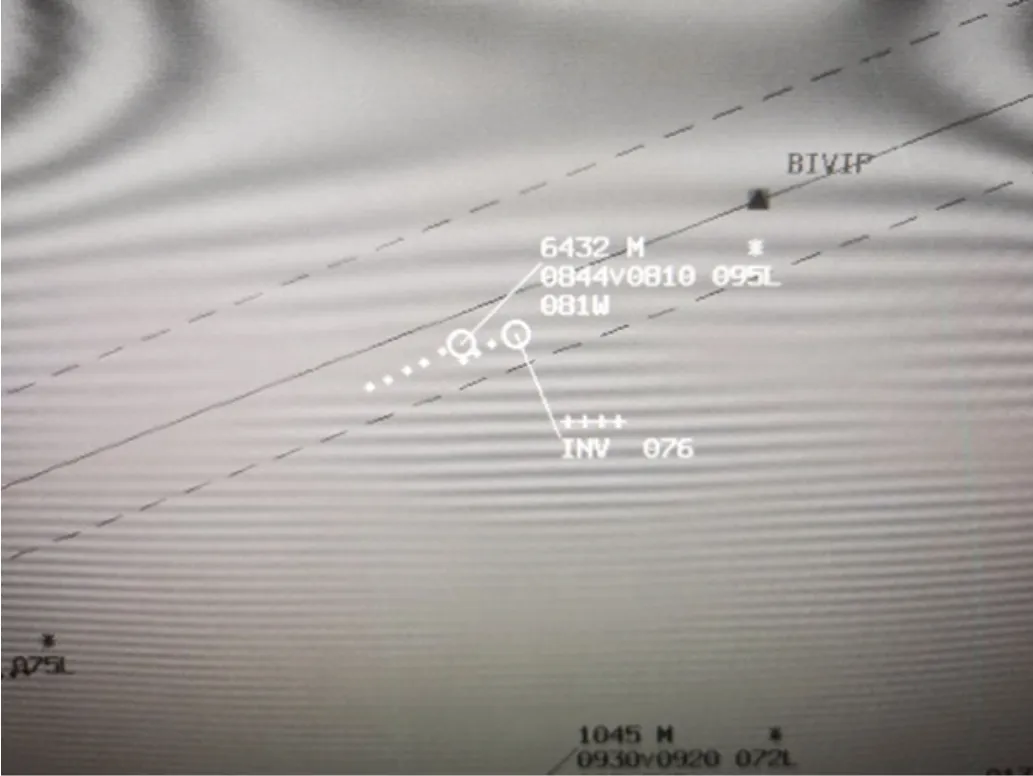
图2:欧洲猫自动化系统重放画面截图

图3:多雷达信号分析系统重放画面截图
由上述分析可见,通过多雷达信号分析系统,将造成目标分裂的对应路雷达监视源筛选了出来,完成了一次监视源异常情况分析。这样的情况是一线运行值班员常做的工作内容,分析结束后需要在运维平台做好记录。如图4所示。

图4:多雷达信号分析系统目标定位结果截图
3 问题分析
管制员日常工作中,不可避免的会遇到源于监视目标信号显示异常的情况出现,比如目标速度、高度跳变,假目标,目标分裂等情况。在广州区管中心,区域管制加上进近管制共6 个室,区域引接雷达32 路,进近引接雷达8 路,若管制报某地出现监视目标信号异常情况,现场一般是依据地理位置大概判断可能造成异常情况的若干部雷达方位,然后再多雷达信号分析系统中选定相关雷达,分色选定不同的雷达源头,进行实时或者回放的操作进行分析,从而找出引起异常情况的雷达源,然后对该路雷达进行屏蔽,通知雷达站,并向管制解释引起异常的雷达情况以及处理阶段。最后,技术人员需要在运维平台进行事件记录。
对技术人员日常工作来讲,运维平台最常用的就是值班事件记录功能,将管制异常反映、现场值班人员响应方式、处理方式、故障排查及原因查找等内容详细记录在案,供统计及调查分析。同时,该模块提供了事件关键词查询及相关事件导出的功能。例如目标分裂相关事件查询及导出后如图5所示。

图5:目标分裂情况统计
从上述事件中可以提取用户异常情况报告及引起目标分裂的雷达情况。不仅是目标分裂,还有高度跳变、速度跳变、假目标等监视源异常情况,以此类推,按照相同的方式进行提取。
为方便统计分析,本次提取区管中心2019年7月至2020年7月监视信号异常情况的所有事件,包括高度跳变、速度跳变、假目标、目标分裂等。集中统计,查看具体情况,经统计数量分析结果如图6所示。

图6:区管中心2019-2020 监视源异常情况统计
通过分析各个事件中提到的相关监视源得出如图7所示的结论。

图7
由上述分析,我们可以提取出如下重要信息:
(1)重点关注区域管制三室监视源信号异常情况,尤其是铜仁雷达。铜仁雷达为INDRAS 模式二次雷达。对其引起的监视源信号异常,可从如下几点进行分析:
1.高度跳变是雷达对同一目标连续解析出来的高度数据关联性较低,产生高度变化异常,如果高度变化很大就可能导致目标的速度跳变。引起的原因可能是目标所处周围环境的气压产生变化,因为雷达地面站所获得的高度数据通常都是解析飞机上的气压高度表给出的数据而来。
2.假目标的成因主要有反射(异物)、异步干扰(旁瓣接收信号不同步)、同步串扰和交织(飞机方位相近在成应答代码存在重叠)、旁瓣穿透及绕环(旁瓣询问得到回答引起真实目标方位干扰)等
3.目标分裂产生的原因,大致分为三部分,一是自动化处理系统软硬件或者雷达参数偏差造成目标分裂,二是单个雷达输出目标缺乏稳定性,引起的原因包括天线振子异常或驱动不足、接收机单脉冲Σ、Δ 的相位关系及编码器异常造成目标抖动,三是传输路由中电平设置不合理导致解码错误等
(2)由上述分析过程可以看出,运维平台值班事件的记录、查询和导出功能给统计分析提供了很大的便利。便于我们从类别的角度、量的角度等不同的维度对监视源信号异常情况进行分析。有学习有反馈才能有进步,与此同时,为单位运维平台提供如下建议,丰富系统功能,在未来大数据多方运用的前提下提升实用性:
1.细化值班事件记录类别,添加监视源列表选项,包括32 路雷达、ADSB 等;添加监视源信号异常类别,如假目标、高度跳变、速度跳变、目标分裂等选项。并开放上述选项的统计功能,从而可以直接导出分析结果,不再需要导出事件由人工进行关键字提取,再进行数量分析。提高统计问题的能力,便于技术人员对异常情况的总体分析。
2.丰富查询导出类别,例如用户异常反映的用户选项、监视源选项、异常情况类别选项查询,并分别精准导出,提升统计的精确性
4 结语
通过本次监视源信号异常情况分析,我们认识到,单位自研多雷达信号分析系统设备在实际的运行中,除了可以实时的对监视源信号异常情况进行及时的分析,还可以结合运维平台,进行大数据分析,从而找出频繁出现问题的管制运行室,以及个别雷达站点,进行针对性的处理。在系统间的关联分析中,研究问题,发现问题,解决问题,从而使得系统向更好的方向发展,更好的保障飞行的安全。在日常的工作中,不断研究,深化理解,丰富经验,对未来监视信号异常情况故障处理会更加的高效,从而达到工作效率的提高。
猜你喜欢
煤气与热力(2021年10期)2021-12-02
青年歌声(2019年12期)2019-12-17
消费导刊(2017年24期)2018-01-31
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
上海国资(2015年8期)2015-12-23
舰船科学技术(2015年8期)2015-02-27
现代检验医学杂志(2014年1期)2014-03-03
中共宁波市委党校学报(2014年4期)2014-03-01
湖南水利水电(2014年6期)2014-02-27
