P2 混合动力汽车发动机起动过程变速箱控制策略研究
2021-04-19 12:39
小型内燃机与车辆技术 2021年1期
(安徽江淮汽车集团股份有限公司技术中心 安徽 合肥 230601)
引言
随着国家越来越严苛的油耗要求以及消费者对汽车动力的需求,混合动力车型日益成为各大汽车企业开发的重点,同时将湿式双离合自动变速箱(DCT)搭载到混合动力车型中,既能满足国家强制性油耗的要求,同时也能满足消费者对驾驶舒适性和动力性的要求。一般情况下,混合动力汽车会采用纯电驱动(即电机工作),当电机能力不能满足驾驶需求时,此时电机会带动发动机起动,使发动机介入工作,由于发动机起动过程转速与转矩都有很大波动,若控制不当,可能会导致输入到车轮的转矩剧烈变化,从而影响整车驾驶的平顺性[1]。
模式切换过程中发动机起动整车相关控制已经成为国内外混合动力汽车研究的重点内容。如文献2提出了一种变速箱与电机协调控制方法,通过制定变速箱前馈+反馈并结合转矩观测的控制策略,实现模式切换各阶段的平稳过渡;文献3 对发动机起动过程进行动力学分析,提出了一种车辆行驶过程中发动机起动过程电机转矩控制策略;文献4 提出一种内燃机转速闭环控制,以减小混合动力汽车在发动机起动过程中动力系统的转矩波动;文献5 提出了基于模糊PID 算法的DCT 变速箱压力控制策略和动力源转矩协调控制策略,以提高模式切换过程整车平顺性;文献6 针对DCT 混合动力汽车变速箱在切换过程各阶段进行目标转矩跟踪控制,进行仿真实验,有效地解决了起动过程整车平顺性;文献7建立简化的单电机混合动力系统模型,以减小起动发动机所用时间为目标,建立起动发动机最优控制;文献8 设计了一种基于标准发动机转矩的前向观测器,通过后向观测器对其进行补偿,同时参考电机的转矩对发动机怠速转矩进行相关标定优化,以提高发动机起动过程变速箱转矩估计的准确性。
目前,发动机起动过程模式切换的研究大部分都集中在发动机与电机上,但是作为整车动力输出的最后控制单元的TCU(自动变速箱控制单元),其控制的好坏决定整车模式切换过程的平顺性,却很少受到重视。因此本文对发动机起动过程变速箱转矩预控控制策略进行了研究分析,同时针对原有控制策略在实车验证过程中存在的不足,提出了一种新的变速箱转矩控制策略,通过增加进入变速箱控制时电机转速与DCT 变速箱输入轴之间转速差的判断条件、变速箱转矩控制过程中采取合适加权转矩跟随策略,最后通过Simulink 建模,生成代码并下载到变速箱TCU 中,在实车上对该控制策略的有效性进行了验证。
1 混合动力系统结构
本文基于某款搭载双离合自动变速箱的P2 混合动力汽车进行研究,具体参数如表1 所示,其P2构建的混合动力系统如图1 所示,主要包括发动机、CO 变速箱、驱动电机、动力电池、高压附件及双离合自动变速箱等子系统。发动机与驱动电机共同组成该系统的动力源,两者即可单独驱动车辆行驶,也可以以混合驱动的方式驱动车辆行驶。因而采用此种结构的混和动力汽车可实现多种工作模式(如表2所示),能够有效地降低车辆油耗,提升车辆的燃油经济性。
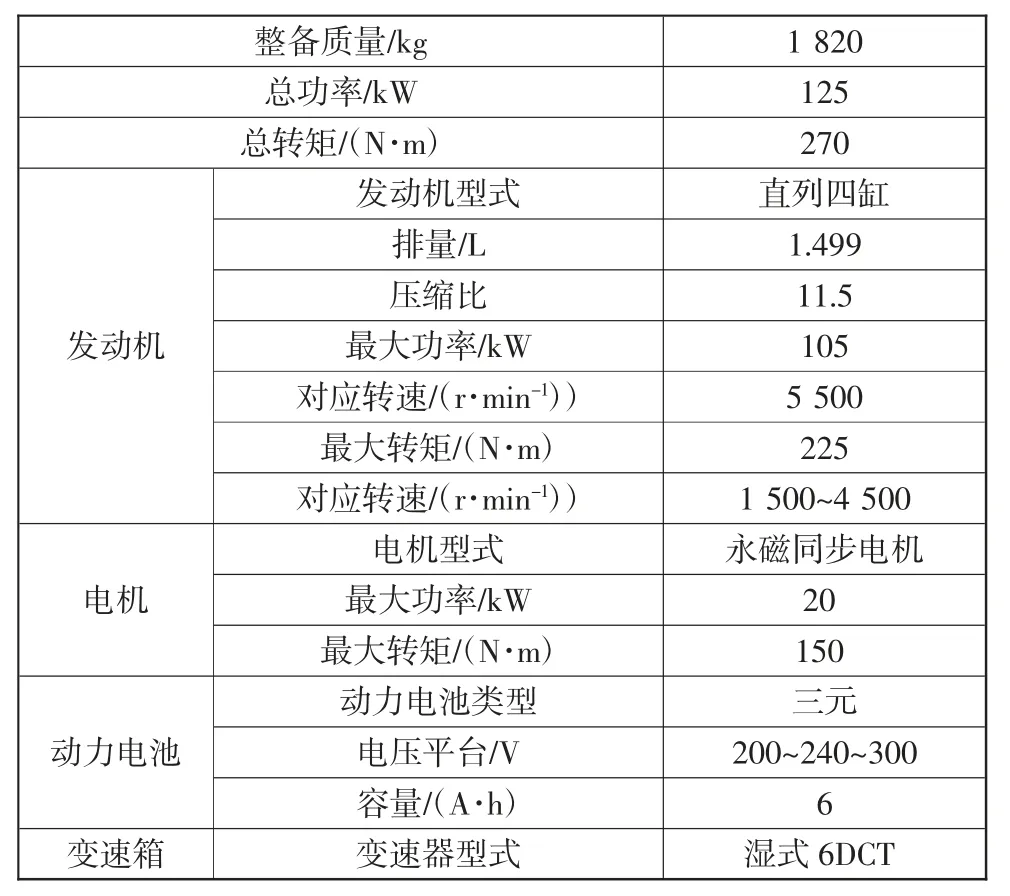
表1 P2 混动车辆信息表
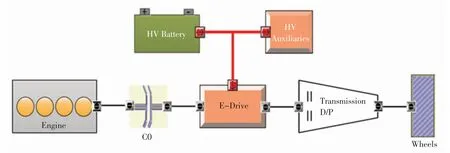
图1 搭载DCT 的P2 混合动力系统结构示意图
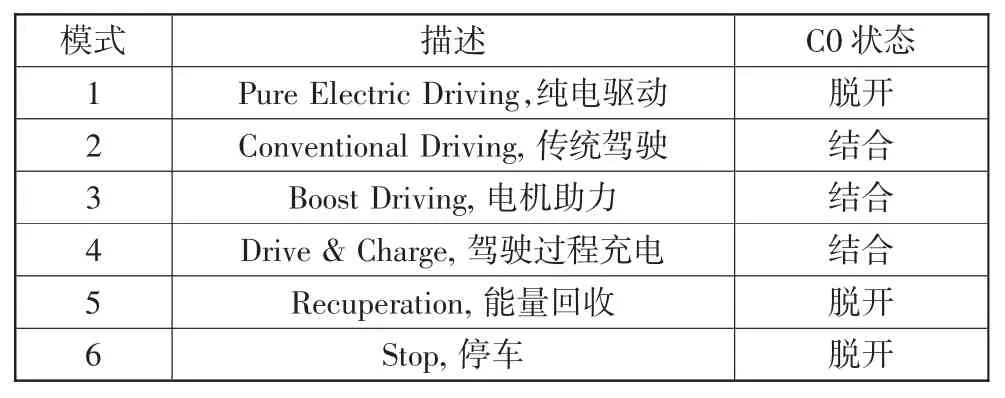
表2 P2 混合动力车辆工作模式
2 发动机起动过程变速箱转矩预控控制策略
P2 混合动力汽车在发动机起动过程中,通过变速箱离合器的滑膜来控制变速箱的输出转矩,以避免发动机起动过程因电机转矩的变化导致变速箱输出到轮端转矩的剧烈变化,确保整车驾驶的平顺性。
2.1 发动机起动过程变速箱转矩预控控制原理
在正常行驶过程中,电机转速ωe的变化情况与期望转矩Te和变速箱传递转矩Tc之间的关系为:

其中:Ie为电机转动惯量。
由(1)式可知,当Tc<Te时,电机转速将上升,当Tc>Te时,电机转速会下降,因此,在发动机起动过程中,变速箱通过控制Tc,使得DCT 变速箱处于滑膜控制,以稳定输出到轮端的转矩。如果变速箱转矩控制不当,会使得车辆出现冲击感。为此,本文引用冲击度对变速箱平顺性进行评价[9],其表达式为:

式中:v 为汽车速度(m/s);a 为汽车加速度(m/s2)。
为确保发动机起动过程整车平顺性,冲击度j 应不大于5 m/s3[10]。
2.2 发动机起动过程变速箱转矩预控控制策略
在发动机起动过程变速箱的转矩预控控制如图2 所示。

图2 发动机起动过程变速箱转矩预控控制图
总体可分为初始阶段、转矩下降阶段、转矩稳定阶段及转矩上升阶段4 个阶段,控制逻辑如图3 所示,每个阶段控制如下:
1)初始阶段。
初始阶段即变速箱进入转矩预控阶段,当整车能量控制单元HVCU 向变速箱发送转矩预控请求时,变速箱相应请求,进入转矩预控控制。
2)转矩下降阶段

图3 转矩预控控制逻辑图
在变速箱进入转矩预控后,降低变速箱转矩,以获得滑膜控制(但是不能降低过小,避免动力传递过小)。
3)转矩稳定阶段
在转矩稳定阶段发动机完成起动过程,通过调整变速箱转矩,使得变速箱一直处于动态滑膜控制,以稳定变速箱转矩Tc,确保输出转矩稳定,不受发动机起动过程转矩波动的影响。
4)转矩增长阶段
当发动机起动完成后,调整变速箱转矩Tc,使之恢复到初始阶段转矩,变速箱转矩预控结束。
2.3 现有控制策略的不足
在实车上进行转矩预控优化时,发现现有的控制策略存在相关不足,会对发动机起动过程整车驾驶的平顺性有一定影响,具体分析如下:
1)在HVCU 发动转矩请求时,TCU 就会响应请求,进入转矩预控控制,此时电机轴与变速箱输入轴处于同步状态,当电机转速提升时,变速箱输入轴转速会跟随电机转速波动,从而引发整车波动,影响驾驶性。如图4 所示。
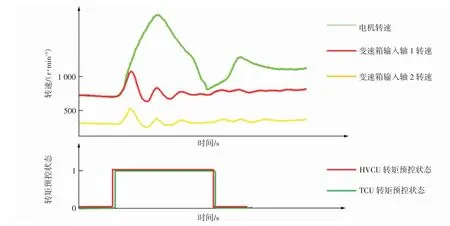
图4 电机转速带动输入轴转速波动
2)在转矩稳定阶段,变速箱转矩计算公式为:
Tc=Tc0+ΔTe(3)
其中:Tc0为变速箱初始转矩,ΔTe为期望转矩变化率。
当期望转矩Te不变时,ΔTe=0,变速箱不会加载,踩恒定油门下转矩预控过程整车无加速感,转矩预控结束后整车突然有加速感,造成变速箱状态切换过程整车加速不平顺,如图5 所示。
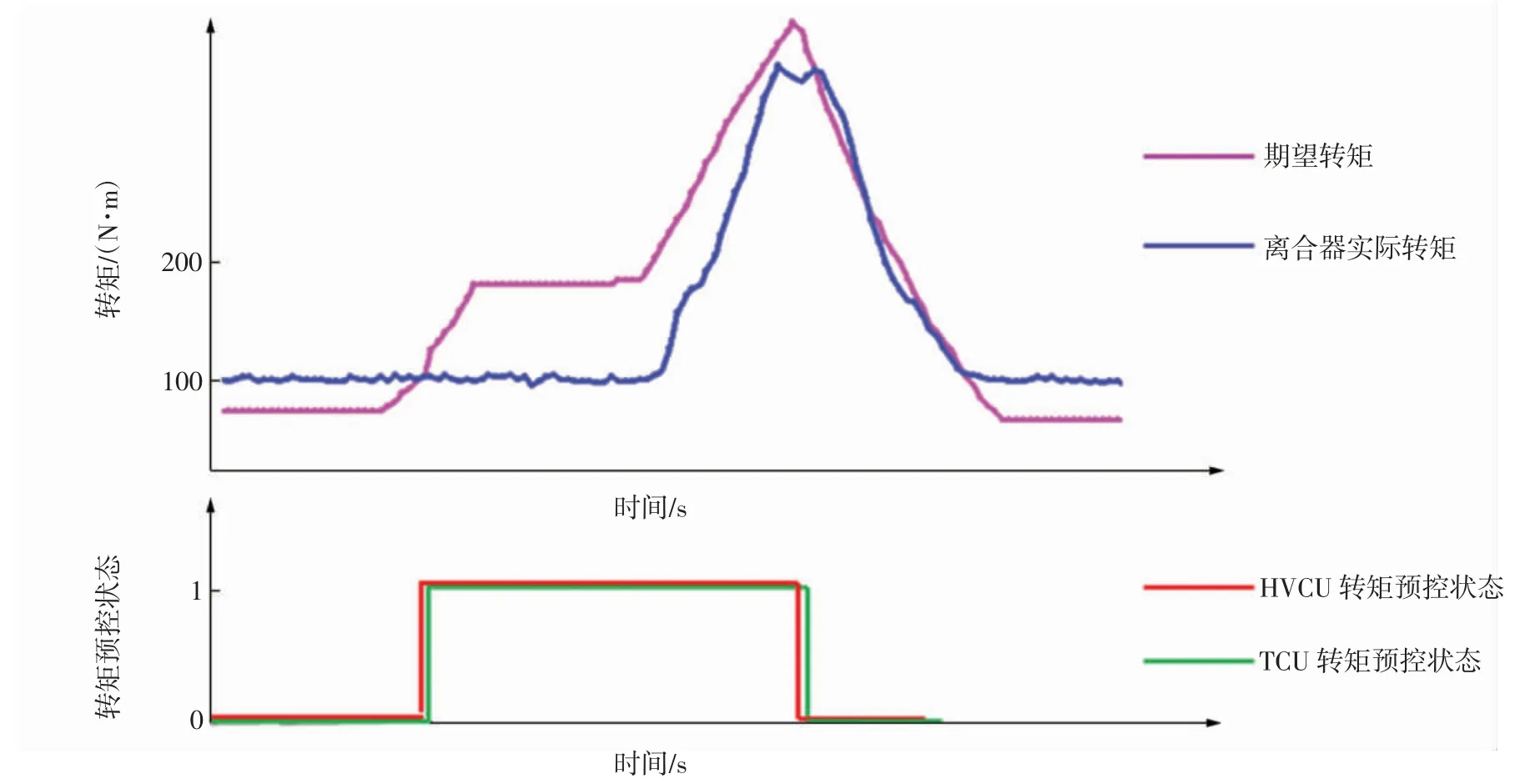
图5 变速箱实际传递转矩不跟随期望转矩
2.4 优化后的控制策略
针对现有变速箱转矩预控控制策略的不足,对相关控制策略进行了优化,具体如下:
1)针对因电机转速提升带动变速箱轴转速波动问题,在现有的转矩预控策略上增加转速判断条件,当HVCU 发送转矩预控请求时,只有当电机转速rd与输入轴转速rs有一定转速差时,即rd-rs>Δ 时(Δ为可标定值),TCU 才响应HVCU 的转矩预控请求。
2)针对因期望转矩Te不变导致变速箱转矩Tc不加载问题,在转矩稳定阶段,增加变速箱转矩控制策略,确保变速箱扭矩Tc参照期望转矩Te进行加载,即Tc=Tc0+δ(Te-Tc0),δ 为可标定值。
优化后的转矩预控逻辑图如图6 所示。
2.5 实车验证
为了验证优化后的转矩预控策略的实际控制效果,将研究的转矩预控控制策略通过Simulink 建模,生成代码并下载到变速箱TCU 中,在实车上进行了相关测试验证,整车综合一体化控制的CAN 信号通过CANape 设备进行采集,采集的验证工况如表3所示。
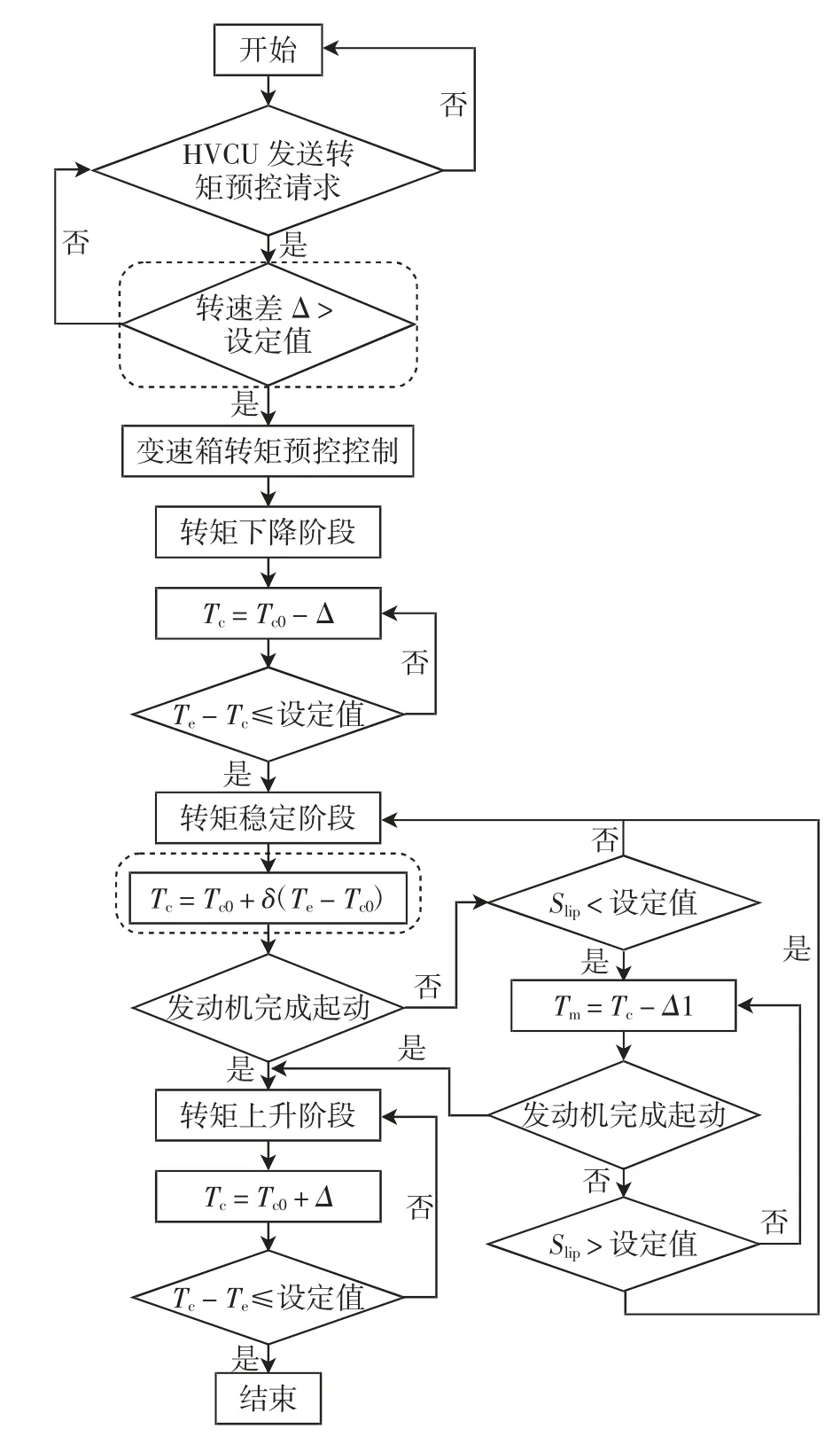
图6 优化后的转矩预控逻辑图

表3 转矩预控验证工况
验证时,设置转速差Δ=30 r/min;δ=1,按照表3 的验证工况进行验证测试,较原有的逻辑,新逻辑增加转速差判断条件后实车测试结果如图7 所示,当HVCU 发送转矩预控请求时,等电机转速与输入轴转速形成30 r/min 的转速差时,TCU 才响应转矩预控请求,此时电机转速提升,输入轴转速保持稳定,冲击度最大为0.8(小于5 m/s3),总体较平稳(如图7 所示)。
较原有逻辑,新逻辑修改转矩跟随策略后实车测试结果如图8 所示,变速箱实际传递转矩达到期望转矩,发动机起动过程,冲击度最大为2.5(小于5 m/s3),车辆加速总体平顺。
实车验证测试结果表明,采用所提出的变速箱转矩预控控制策略在整车上可实现变速箱转矩传递的平稳,有效地避免了P2 混合动力汽车发动机起动过程的冲击,确保车辆驾驶的平顺性和舒适性。
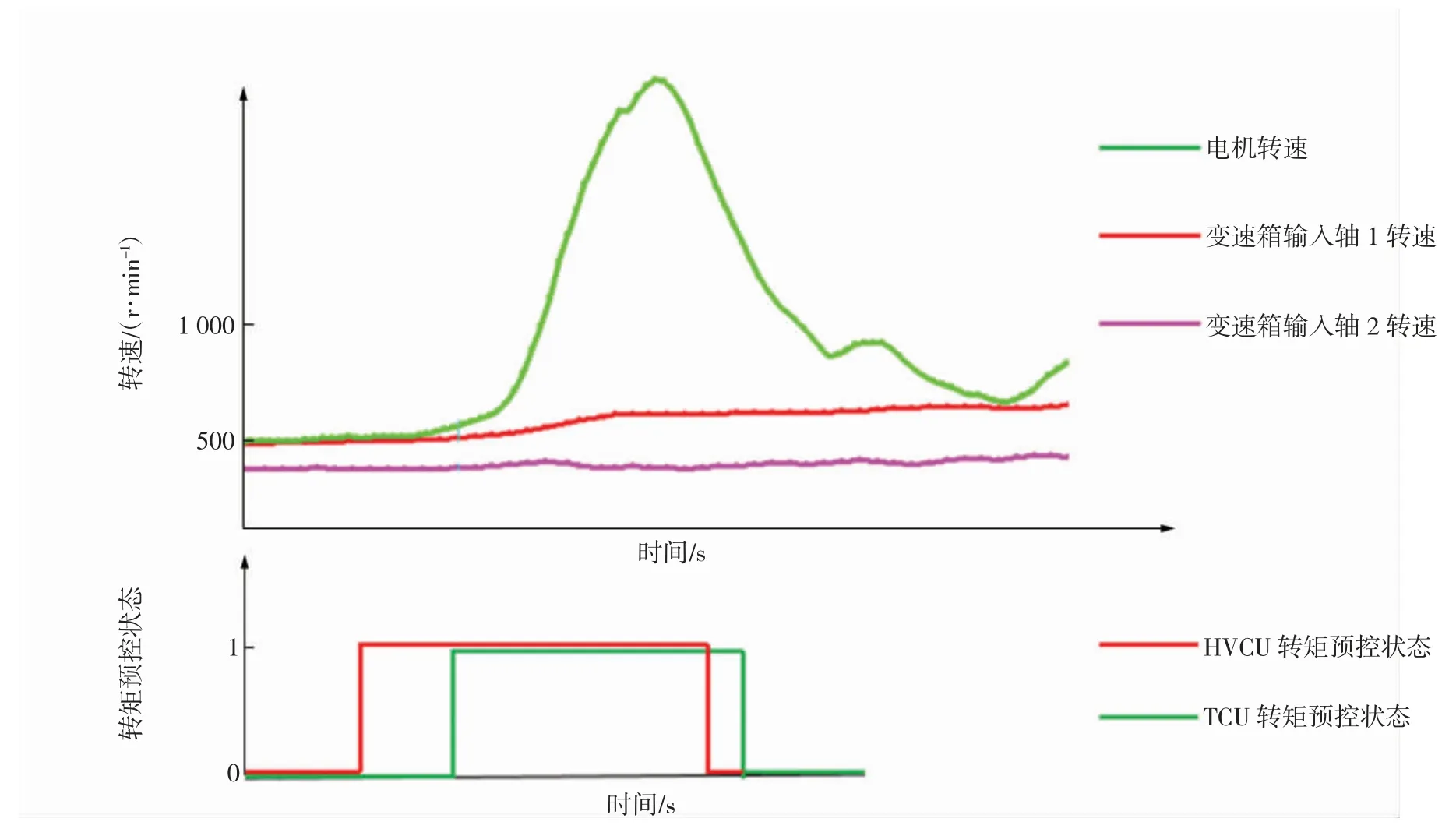
图7 优化转速差判断条件策略

图8 优化转矩跟随策略
3 结论
对P2 混合动力汽车发动机起动过程变速箱转矩预控控制进行了研究分析,针对目前控制策略的不足,提出了一种新的变速箱转矩控制策略:
1)通过设计进入变速箱转矩控制时电机转速与DCT 变速箱之间滑膜差的判断条件,确保变速箱进入转矩预控时电机转速与变速箱轴转速间存在滑膜差。
2)转矩预控过程中采取合适的变速箱转矩跟随策略,确保变速箱实际转矩跟随期望转矩。
3)设计出发动机起动过程中变速箱转矩预控整车验证工况,通过实车验证。新的转矩预控逻辑满足开发要求,满足设计指标(冲击度小于5 m/s3)。
猜你喜欢
消费电子(2022年6期)2022-08-25
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
建材发展导向(2022年4期)2022-03-16
汽车工程师(2021年12期)2022-01-17
今日农业(2021年11期)2021-11-27
电机与控制学报(2018年9期)2018-05-14
小说月刊(2012年8期)2012-05-08
cookie world(2010年5期)2010-06-10