
一种基于人工智能的多功能车辆安全辅助系统的研究
2021-04-18 00:43孙鸿杰马海龙俞嘉莹马新娟
科技研究·理论版 2021年18期
关键词:人工智能
孙鸿杰 马海龙 俞嘉莹 马新娟

摘要:目前,车辆安全事故多发,多车型智能驾驶辅助系统较为不完善,大部分车辆驾驶者不能有效预防即将到来的危险,与之相关的车辆安全驾驶辅助技术研究日益受到重视。本文主要介绍了一种基于人工智能的多功能车辆安全辅助系统的研究,该系统面对多种路况、多种驾驶环境,采用人工智能嵌入式学习系统,结合深度学习的机器视觉图像检测技术,实现对小车前方道路状况进行实时监测,尤其是突然出现的行车障碍如行人、汽车、动物等,辅助小车驾驶系统进行智能的紧急刹车或避障,从而有效提高汽车驾驶的安全性及智能性,大幅降低意外事故发生率。
关键词:智能驾驶辅助系统;人工智能;安全辅助系统
中图分类号:U463 文献标识码:A
前言
汽车行业发展至今,驾驶速度与使用舒适度日臻趋于完美,但常规车辆的使用安全性,受到车辆本身的可靠性以及驾驶员技术和状态的影响,暂无确切标准衡量,每年都有大量在操作不当和不及时预防导致事故的报道,因此危险预测关系到人员生命和财产安全的大事,也是许多汽车厂商和用户所车厂商和用户所关心的众多问题之一。
我国历年交通事故虽有下降,其主要原因在于汽车性能不断提升和人们道路安全意识的不断提高,团队将当前的路况分析和驾驶环境模块向着深度学习和人工智能方向改进,并将各个模块融合成一个系统,应对多种驾驶环境。本系統顺应人工智能发展趋势,合理考虑人性化非侵入式设计,刨除厂商车身结构限制,提供多适应独立系统安装。
1.装置原理
碰撞危险预防部分
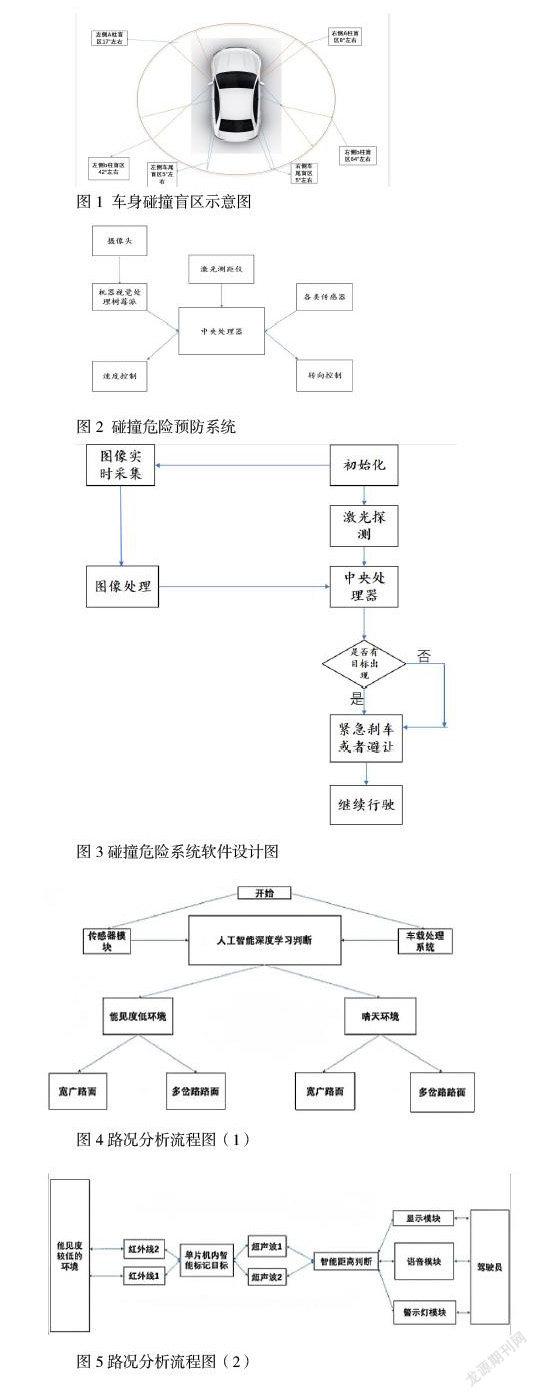
碰撞危险预防部分采用opencv模型图像数据库跑入,用python全网爬取路况分析资料给模型库,将实时路况全景采集,并将盲区图像进行深度学习识别和车载处理器层进行通信。车载处理器对危险进行分析之后将危险信息传给车内单片机并连接车内主机显示报警信息并且发出警报。考虑到摄像头旋转空白问题和因能见度低引起的识别空白,本系统加入雷达测距系统。在摄像头识别空白的区域进行3d测距测速,同样通过单片机进行数据传输,使用单片机连接、传导,在接收端屏幕显示3d距离并与危险距离对比。为了避免一些相对小型目标出现在视野空白,本系统还添加红外线传感器,检测小型移动热源,实现车流量密集下热源数量的检测。通过单片机共同传到总检测系统终端,终端计算并判断危险性,从而增加保障。本系统采用多传感系统,降低了平均检出时间并提升了检测精度。
(2)路况分析部分
路况分析部分采用基于yolo3和opencv的视频分析和deepsort算法框架融合,将YOLOv3算法和DeepSort算法结合,展开车流量检测研究。本系统采用YOLOv3算法在Darknet-53图像特征提取网络结构下训练车辆目标检测模型,获得性能优良的YOLOv3检测器。再将其检测结果作为后续跟踪的输入,结合DeepSort算法框架,利用运动模型和表观信息进行数据关联,实现端到端多目标视觉跟踪,进行视频车流量检测,使车辆目标在光照、快速移动、遮挡等复杂情况下获得良好的跟踪效果,提升了传统车流量检测算法的性能和鲁棒性。
(3)面部识别部分
面部识别部分基于opencv和yolo3深度学习的视频分析技术提出了一种基于面部特征融合的驾驶员疲劳识别算法。该算法构建了一个三级识别模型:前期处理、特征级与决策级。前期处理主要使用现有技术进行人脸、眼唇检测与追踪。特征级中,针对眼部、唇部以及面部表情的特征提取方式做出了两种疲劳识别算法:基于图像金字塔局部二进制模式的疲劳识别算法和基于局部二进制模式与重构方向梯度直方图融合的疲劳识别算法。随后,将这两种算法与基于局部二进制模式、基于方向梯度直方图及其扩展模式的疲劳识别算法等进行了对比仿真实验,验证算法的性能,以选出最合适的各个证据源的疲劳判别方式,完善特征级模型。在决策级,针对面部疲劳表情、眼部疲劳状态、唇部疲劳状态以及上一时刻判别的疲劳状态这四种证据源,使用改进的基于Dempster-Shafer 证据理论的多信息决策层融合算法融合以实现综合判决。最后,进行仿真对比实验,以完善决策级融合框架。
(4)胎温胎压检测部分
为提高轿车胎温胎压自动监测能力,本发明提出基于机器视觉的轿车胎温胎压仪表读数自动校验方法。构建轿车胎温胎压仪表读数的视觉信息检测模型,采用传感器监测方法进行轿车胎温胎压仪表读数信息采集,对采集的轿车胎温胎压仪表读数数据进行信息融合处理,提取轿车胎温胎压仪表读数的相关性特征量,采用匹配检测方法进行轿车胎温胎压仪表读数的误差调节,构建轿车胎温胎压仪表读数的自动检验机器视觉分析模型,实现机器视觉下的轿车胎温胎压仪表读数自动校验。仿真结果表明,采用该方法进行轿车胎温胎压仪表读数自动校验的准确性较高,误差较小,提高了胎温胎压监测的精度。
与此同时,针对汽车轮胎内TPMS模块不易拆卸的特点,设计一种通过无线方式自动获取轮胎内传感器模块ID号并重置汽车仪表终端内可监测传感器模块ID号的智能辅助终端。
产品主要包括主控制系统设计、无线通信系统设计、显示触摸系统设计、充电系统及电源系统设计等。其设计选用32位Cortex-M3内核的ARM微控制器作为控制核心,其高效快速的数据处理能力可以承担系统数据通信及外围模块控制任务;无线通信系统包括方案选取、射频参数设计、天线网络设计及软件设计,并对可能引起系统误码率和稳定性的因素进行了多方面分析;采用TFT彩色液晶显示器作为人机交互操作终端,采用触控方式以获得良好操控体验,显示触摸系统设计包括硬件接口设计、触摸屏校准、人机交互界面UI设计及系统软件设计等。
2工作流程
(1)碰撞危险预防部分基于原理设计的流程图如下图所示,图1是车身碰撞盲区示意图,图2是碰撞危险预防系统结构设计图,图3是碰撞危险系统软件设计图。
(2)多路况分析部分基于原理设计的流程图如下图所示,
图4、图5、图6为多路况分析流程图。
3系统测试分析及综合框架
將多传感器智能安全驾驶辅助系统与单一传感器系统测试精度进行对比,其具体结果如图7、图8所示。
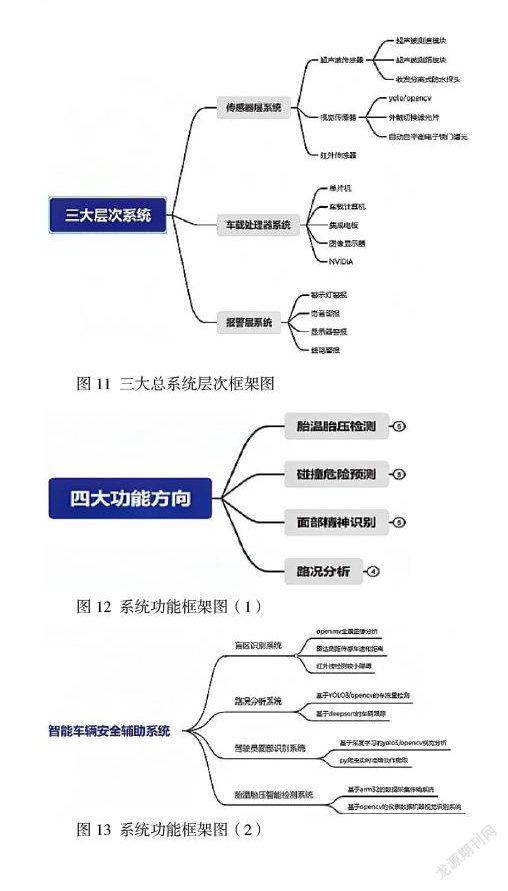
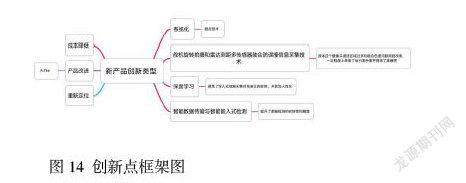
在本阶段实验室环境下,团队将模拟车辆进行产品结构预安装如图9所示,车模系统安装模拟如图10所示,三大系统层次框架图如图11所示,功能框架图如图12、图13所示,创新点框架图如图14所示。
4产品创新方向
(1)本产品将当前的路况分析和驾驶环境模块向着深度学习和人工智能方向改进,推进人工智能神经网络系统对安全驾驶分散化不成体系模块的总和使用。采用舵机旋转视频拍摄和雷达测距多传感器融合碰撞危险预防技术,将原本四个摄像头遮挡重叠区域过多和融合色差问题得到改善,一定程度上降低了运行复杂度并提高了准确性。
(2)本产品增加了人性化的非侵入式设计,采用摄像头提取面部进行人工智能分析识别驾驶员疲劳状态,保证安全驾驶的状态。
(3)本产品包括轮胎温度和轮胎压强范围检验,在现实应用中还未普及化。且即使配备TPMS模块,若汽车轮胎损坏或TPMS模块损坏需要更换,如何高效稳定地实现对汽车仪表终端内ID编码进行更新也是亟待解决的痛点。而本系统采用高效处理和信号传输的处理器系统并采用机器视觉高精度识别仪表盘数据。可以有效减少因车身安全度不足导致的事故。
参考文献:
[1] 夏明.汽车倒车辅助系统的设计[J].装备制造技术,2017,(4):209- 211.
[2] 胡鹏,秦会斌.基于红外测距汽车倒车雷达预警系统设计[J].传感器与微系统,2018,第37卷(7):114-116,126.
[3] 张弘扬.基于单片机的汽车倒车雷达设计[J].数码世界,2017,(10): 36.
[4] 乔亚楠,刘新宽,刘平等.高强度镀锌钢丝表面硬度与扭转性能关系研究[J].功能材料, 2017,第48卷.(8):8053-8057.
[5] 廖晓文,赖香功.金属热处理工艺对齿轮材料性能的影响[J].世界有色金属, 2019, (21):159-160.
[6] 单新平,蒋云峰,刘宗健.基于超声波倒车雷达的研究[J].汽车电器, 2019,(7):20-22.
猜你喜欢
消费电子(2022年6期)2022-08-25
西安航空学院学报(2022年2期)2022-07-04
儿童故事画报(2022年3期)2022-04-27
科学Fans(2019年6期)2019-07-26
商界(2019年12期)2019-01-03
故事作文·高年级(2018年11期)2018-11-19
IT经理世界(2018年20期)2018-10-24
小康(2017年16期)2017-06-07
IT经理世界(2017年6期)2017-03-29
南风窗(2016年19期)2016-09-21
