基于SolidWorks Simulation的人体转运机器人研究
2021-04-16 10:52欧阳叶胡国清陈镇国
新技术新工艺 2021年3期
欧阳叶,胡国清,陈镇国
(华南理工大学 机械与汽车工程学院,广东 广州 510641)
2016-2018年,我国医疗机构住院手术人次分别为5 082.2万、5 595.7万、6 171.6万,年均增长率在10%以上[1]。目前,国内医疗卫生机构手术室保有量巨大,手术人次增长迅速,但是在手术过程中,病人的转运主要是由病人家属协助医护人员用人工的方式将病人从手术台转运至病床。该转运方案主要依靠人力完成,劳动强度大,且容易引发患者二次损伤。因此,越来越多的研究学者提出了利用机械装置来协助医护人员完成病人转运的设想,一方面有助于提高医疗机构的工作效率,另一方面可以减轻医护人员的劳动强度。
2000年以来,日本、瑞典等老龄化严重、人力成本高昂的国家和地区已经对转运护理机器人有过诸多探索,包括大阪变压器株式会社推出的病人转运装置C-Pam(Careful Patient Mover)、日本理化研究所和住友理化株式会社共同研发的护理机器人ROBEAR、日本松下电器产业株式会社生产的集成式护理轮椅床Resyone和瑞典ArjoHuntleigh公司生产的顶部升降式病人移位系列护理设备等。目前,国内高校在病人辅助移位机器人的转运方案设计上,基本参考了C-Pam的双层传送带结构,依靠病人与传送带之间的静摩擦力作用实现转运。
针对手术室病人转运这一特定场景,人体转运护理机器人的设计需要符合2项基本原则:1)转运过程尽量不改变病人的姿势,避免二次损伤;2)该机器人的布置不需要更改手术室原有布局,具有普遍适用性。为此,本文提出一种采用对称的机械手结构对病人进行抓取,利用升降机来实现病人升降的人体转运机器人设计方案,并对关键零部件进行有限元分析,在确保安全性的基础上对其进行优化,可以有效降低升降部分的重量,提升样机的轻便性。
1 人体转运护理机器人研究现状
1.1 基于传送带转运原理的转运装置
2008年大阪变压器株式会社与燕山大学王洪波教授合作研发了病人转运装置C-Pam(见图1),该装置集成了上下两层传送带和控制器,每层传送带由4个独立的子模块组成,其中下层传送带负责该装置在病床到转运床之间的运动,上层传送带负责病人的转运[2-3]。该装置为了消除子模块转速不一致所导致的病人皮肤拉扯,开发了一种新的伺服系统,可以独立测量上下两层传送带每个子模块电动机的位置、速度和扭矩,并由主控制器在接收到控制命令后向电动机驱动器输出脉宽调制(PWM)信号[4]。军事医学科学院侍才洪设计的伤员换乘转运机器人和江南大学刘华设计的医疗辅助移位机器人在病人的转运上均采用了该结构,并在此基础上设计了升降机构、姿态变换机构、移动底盘和控制系统,使得转运机器人不仅可以对病人进行转运,而且可以对病人进行姿态变换,用作日常护理[5-7]。
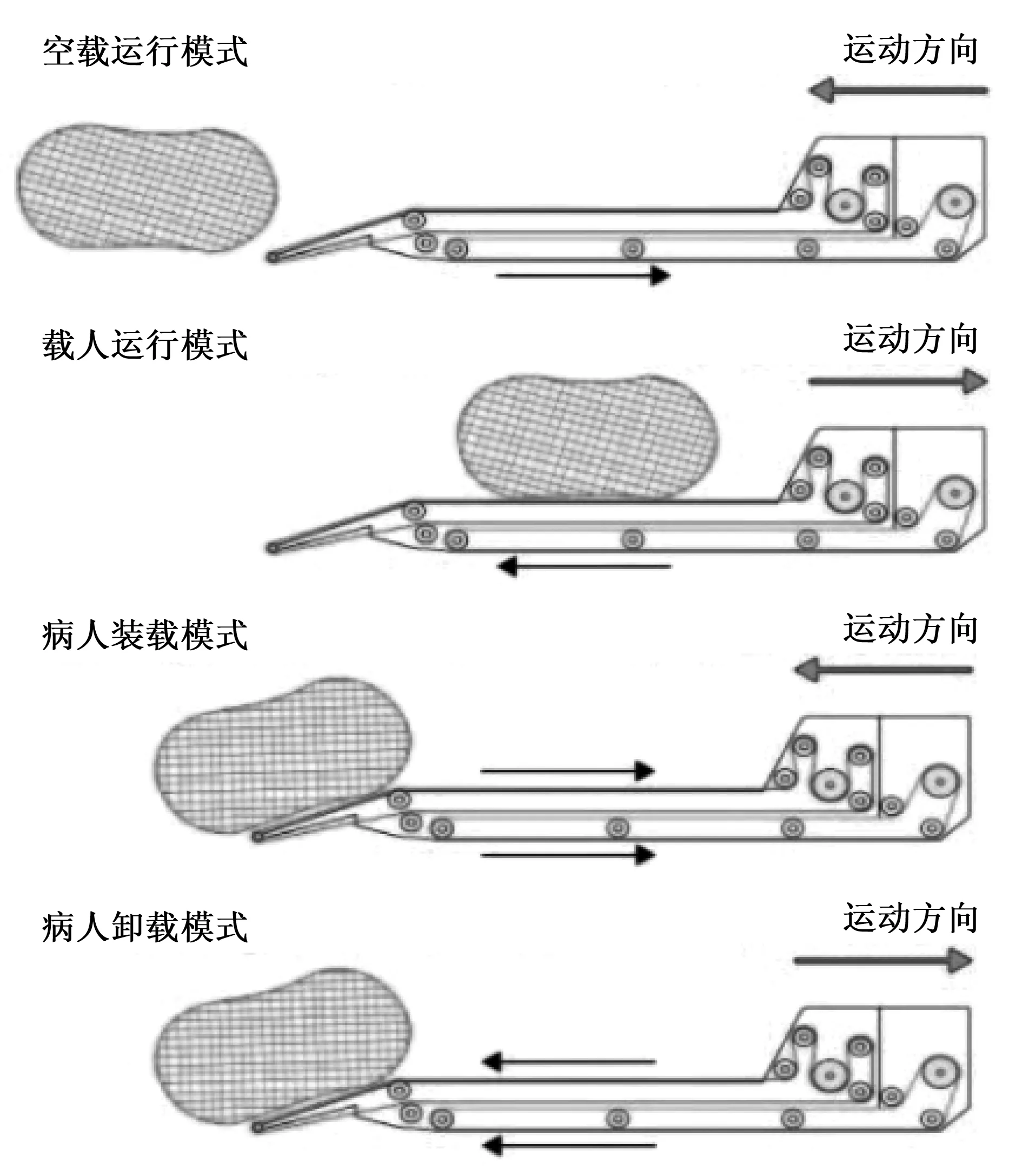
图1 C-Pam工作原理
该类装置的传送带由于尺寸限制需要采用多个子模块共同组成,但是每个子模块配备的电动机无法完全同步,需要开发伺服控制系统解决该问题,增加了装置的复杂性,且应用过多的电动机和控制器并不具备经济性。
1.2 拟人形态的转运护理机器人
2007年日本理化研究所仿生控制研究中心开发了一款名为RI-MAN的机器人,该机器人具有类似于人类的外形,并配备视觉传感器、听觉传感器、触觉传感器和气味传感器,通过融合视频和音频信息来实时搜索特定的人,并基于声音识别功能来理解人的语音,在利用双臂抱起病人时会根据触觉传感器反馈的受力信息与人类进行身体上的互动,此外气味传感器使得RI-MAN可以识别常见的气味,如尿液[8]。
2009年,日本理化研究所(RIKEN)与东海橡胶工业公司(TRI)联合建立的人机交互机器人研究合作中心在RI-MAN机器人的基础上开发了辅助护理机器人RIBA(交互式人体辅助机器人),该机器人可以利用双臂将61 kg的病人从床搬运至轮椅上。2011年,RIKEN-TRI推出了RIBA-II,该机器人在底部和下背部添加的新关节使得它可以蹲下将地面上的病人抱起,且机器人的负重提升至80 kg。2015年,日本理化研究所(RIKEN)与住友理化株式会社(SRK)合作推出了第3代ROBEAR机器人(见图2),该机器人的质量从RIBA-II的230 kg降低至140 kg,更加轻巧方便。

图2 第3代ROBEAR机器人
该类机器人的限制在于结构过于复杂,生产成本太高,且目前技术尚不成熟,无法胜任复杂的病人护理任务,但是仅用于完成病人转运任务并不具有经济性,因此在2015年3月RIKEN-SRK人机交互机器人研究合作中心已经关闭。
1.3 吊带升降机
瑞典ArjoHuntleigh公司生产的病人移位系列护理设备采用吊机的结构,配合特制的符合人体工程学的吊带,在病人穿上网状吊带后,通过升降机的挂钩钩住网状吊带外沿的绳套,利用电缸的动力将网状吊带和病人整体抬升起来(见图3)。该升降机底部安装有脚轮,使得医护人员可以推动该升降机对病人进行移动,且升降机挂钩可以搭配环形吊带、担架吊带等不同样式的特制吊带,从而对病人完成不同姿势的转运以适应病房转运、家庭转运等复杂的场景。

图3 Minstrel升降机
该类升降机的限制在于需要使用公司特制的吊带,且吊带会跟随病人进出手术室,因此吊带重复使用需要经历复杂的消毒流程,使得该类设备并不适用于手术室环境的病人转运。
2 机器人总体方案设计
转运机器人结构图如图4所示。该人体转运护理机器人的结构包括机器人框架、蜗轮丝杆升降机构、升降工作台、滚珠丝杠滑台和机械手转运机构等5个部分,其中机器人框架采用80 mm×80 mm的铝型材通过角码连接组成,长、宽、高尺寸为2 000 mm×1 360 mm×1 800 mm;涡轮丝杆升降机构具有传动比大、可以自锁的特点,广泛应用于大载荷、低速的工作场合,在样机制作中可以用于机械手工作台的升降;滚珠丝杠滑台底座为30 mm×150 mm的铝型材,配合直径为20 mm的丝杠负载可以达到200 kg,可以用于承载机械手爪和病人。
在实际工作过程中,根据转运场景可以由医护人员将转运机器人移动至手术床或病床的正上方固定,或者固定机器人的位置将转运床移动至机器人的正下方,再由医护人员从一侧抄起病人倾斜一定角度,控制该侧的机械手爪平行移动至病人下方,医护人员松手后病人会自然平躺在单侧的机械手爪上,升降机带动机械手爪向上移动一定距离使得病人悬空,再由另一侧的机械手爪平行移动至合拢,以合抱的姿势将病人抱起离开床面。将该过程反转即可将病人转运至其他病床上,从而实现对病人的转运。

图4 转运机器人结构图
3 关键零部件的优化
3.1 机械手工作台安装板的有限元优化
机械手工作台的安装板两侧可以视作2根450 mm×150 mm的梁,用于安装滚珠丝杠滑台,安装板的厚度为10 mm,中心有深度为10 mm的凹槽,用于与升降机的法兰相连接。根据SolidWorks Simulation的仿真结果[9],在不添加支承的情况下,该安装板需要采用45钢加工才能达到强度和刚度要求,具体承受的最大应力σmax=274.9 MPa,最大形变为16.18 mm。
在对安装板两侧增加厚度为40 mm的加强筋后,该安装板采用6061-T6铝合金即可满足强度和刚度要求,且最大应力σmax=270.6 MPa,最大形变为23.32 mm(见图5和图6)。相比于采用45钢的安装板质量为32.249 kg,使用加强筋的6061-T6铝合金安装板质量降低为12.715 kg。机械手工作台有限元分析结果见表1。

图5 机械手工作台安装板应力云图

图6 机械手工作台安装板形变云图

表1 机械手工作台有限元分析结果
3.2 机械手爪抓钩连接板的有限元优化
根据病人的身高,选择1 500 mm×300 mm×15 mm的铝合金板材作为基础加工抓钩连接板,并间隔120 mm布置2个M8沉孔用于安装抓钩,两侧的抓钩连接板分别有12和13组沉孔。而在机器人实际工作中单侧机械手爪将病人抱起时抓钩连接板需要承受的最大力矩约为350 N·m。
在应用SolidWorks Simulation对抓钩连接板进行有限元分析后,可以得知最大应力点在抓钩连接板与抓钩摆臂的连接处,且最大应力σmax=141.4 MPa,小于6061-T6铝合金的屈服强度σmax=275 MPa,且该连接板的最大形变为1.254 mm,可以忽略不计,故该零件采用6061-T6铝合金加工符合强度与刚度要求。但此时该连接板质量达到17.848 kg,出于控制机器人升降部分质量的角度考虑,决定对连接板中间部分进行切除。
在对连接板沿对称轴切除600 mm×100 mm的部分后,重新进行有限元分析(见图7和图8),最大应力σmax=161.5 MPa,最大形变为1.411 mm,符合强度与刚度要求,且该连接板的质量降低至15.418 kg。机械手爪抓钩连接板有限元分析结果见表2。
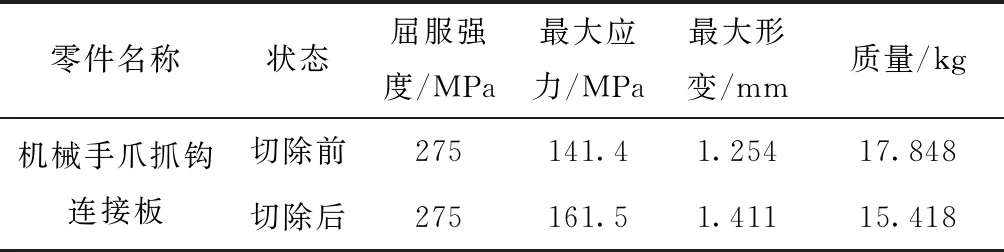
表2 机械手爪抓钩连接板有限元分析结果
3.3 机械手爪抓钩的有限元校核
根据抓钩连接板预留的安装孔位,两侧机械手爪分别安装12和13个抓钩,抓钩的厚度、宽度和长度分别为20、50和600 mm,抓钩自末端开始有长度为500 mm的微小角度斜面。当单侧的机械手爪将病人抱起时,由该侧机械手爪的抓钩共同承受病人的重量,以病人的极限质量100 kg计算抓钩承受的极限应力,12个抓钩在斜面上分别承受约83.3 N的竖直向下方向的力。
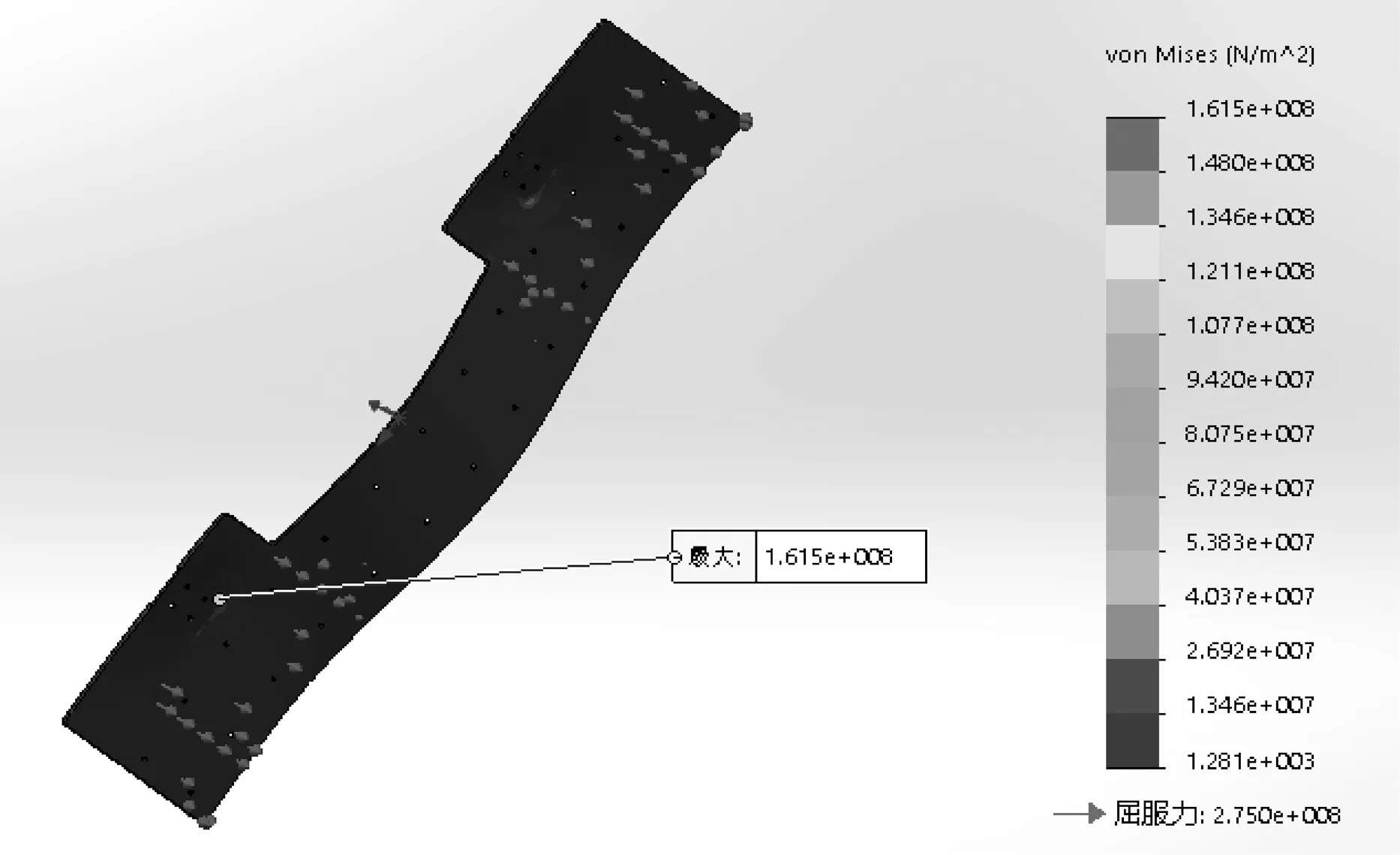
图7 机械手爪抓钩连接板应力云图

图8 机械手爪抓钩连接板形变云图
应用SolidWorks Simulation对抓钩进行有限元分析(见图9和图10),抓钩的最大应力点在抓钩背面的凹槽处,且最大应力σmax=26.96 MPa,小于6061-T6铝合金的屈服强度σmax=275 MPa,且该抓钩末端的最大形变为3.053 mm,可以满足承载病人的要求,故该零件采用6061-T6铝合金加工符合强度与刚度要求。

图9 机械手爪抓钩应力云图

图10 机械手爪抓钩形变云图
4 结语
本文针对手术室病人转运的工作场景,提出了一种区别于目前主流的传送带运输的转运方案,并应用三维设计软件SolidWorks建立了数字模型。通过仿真软件SolidWorks Simulation对关键零部件进行有限元分析,确定了合适的加工材料,并对机械手工作台安装板和抓钩连接板的结构进行优化,使得零部件的质量从67.953 kg下降35.9%至43.559 kg,有效降低了机器人的质量,兼顾了方案的安全性与轻便性。
猜你喜欢
中学生数理化·高一版(2021年1期)2021-03-19
浙江医学(2020年24期)2020-02-03
凤凰生活(2019年10期)2019-10-14
中国特种设备安全(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
北京青年周刊(2018年38期)2018-09-25
小资CHIC!ELEGANCE(2017年21期)2018-03-30
中学教学参考·理科版(2016年11期)2017-06-08
凿岩机械气动工具(2016年3期)2016-03-01