
基于模糊自适应VSG控制的MMC变换器控制策略研究
2021-04-14 06:17:58宗瑜
通信电源技术 2021年22期
宗 瑜
(江南大学 物联网工程学院,江苏 无锡 214026)
0 引 言
基于化石能源的不可再生性和大规模开发导致的能源枯竭与环境污染加剧等问题,风力、光伏等新能源发电技术得到了飞速发展[1]。传统电网难以满足未来电网的发展需要,新能源发电的不稳定性、随机性、不连续性对电网的冲击影响是目前最主要的问题之一[2]。在解决新能源并网的冲击问题方面,柔性直流输电技术具有传输能量大、损耗小、控制灵活以及无换向失败等优势,可以有效促进未来能源互联网的发展[3,4]。
模块化多电平变换器(Modular Multilevel Converter,MMC)因具备开关频率低、损耗小及电能质量高等优点,广泛应用于柔性直流输电领域[5]。MMC变换器也常作为接口变换器,实现对可再生能源的消纳及交直流能量转换。由于变换器本身不具备转动惯量,无法提供惯量支撑,因此在系统受到扰动时容易产生频率偏移和振荡。
虚拟同步机(Virtual Synchronous Generator,VSG)技术通过模拟同步发电机的机械特性,引入阻尼和惯性控制,可以有效弥补传统控制方式无法提供惯量支撑的不足[6]。文献[7]针对MMC逆变器提出了一种基于一致性算法的VSG控制策略,使电网受到扰动后的相对潮流误差足够小。文献[8]提出了基于频率估计与频率前馈的改进型VSG控制策略,均能在电网频率扰动时提高系统的功率频率响应特性,优化系统暂态特性,增强变流调节能力。文献[9]提出了一种基于虚拟调速器的VSG控制策略,以传统下垂控制为基础,加入一阶惯性环节,并用模式分析法获取最优控制参数。文献[10]针对MMC受端换流器采用了VSG控制策略,提高交流电网频率控制稳定性,但由于转动惯量为定值,因此无法避免系统暂态过程较长的问题。文献[11]采用bang-bang控制与VSG控制相结合的控制策略,通过动态改变转动惯量的参数提高系统动态特性,但无法避免频率偏差取值不当时虚拟转动惯量的波动问题。
基于以上背景,针对MMC变换器在并网运行中并不具备惯量及阻尼特性的问题,提出一种适用于MMC变换器的模糊自适应虚拟同步电机控制策略,使MMC变换器的惯性和阻尼得到显著提高,同时提升系统的稳定运行能力和功率分配能力,缩短系统暂态过程,提高系统动态稳定性。通过在Matlab/Simulink中搭建仿真模型,验证了模糊自适应虚拟同步机控制策略的正确性和有效性。
1 MMC变换器拓扑及其工作原理
MMC变换器拓扑结构如图1所示,L0为MMC每一相上、下桥臂电抗器电感,R0为MMC每一相上、下桥臂模拟损耗的等效电阻,N为一个桥臂上的子模块数量。
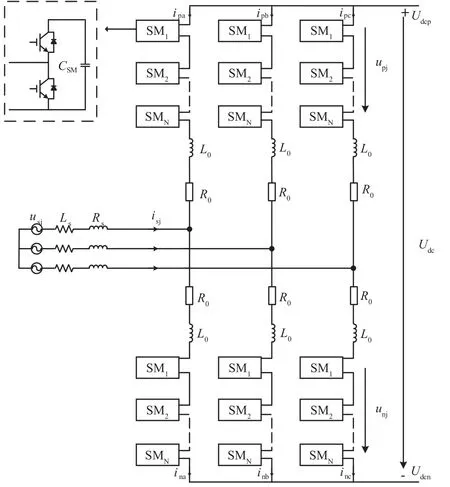
图1 MMC变换器拓扑结构
MMC结构高度模块化,可以通过增加或减少投入子模块的数量来满足不同电压等级和功率的要求。MMC产生的阶跃电压低,可以减少开关器件承受的应力。MMC的子模块冗余特性也使其故障处理能力更强、可靠性更高。其中,电网交流电压为10 kV,直流母线电压为15 kV。
在运行过程中MMC中各模块电压需要维持动态平衡,在均压过程中每一相投入总模块数相同,以维持直流母线电压稳定。基于MMC的多电平特性,输出电压均有多电平特点,相较于两电平变换器可以有效缩小体积。此外,MMC的各个模块均带有模块电容,不需要在直流母线处添加大容量的母线电容。
根据3个相单元的对称性,将总直流电流平均分配于3个相单元中,每相直流电流为Idc/3。上、下桥臂也近似均匀分布,以a相为例,交流电流isa在a相上、下桥臂间平均分配,则a相上、下桥臂电流为:

根据基尔霍夫定律分析可得:

由式(2)可得a相MMC数学模型为:

2 MMC变换器控制策略
针对传统控制策略无法提供惯量及阻尼的特性,本文在传统控制策略中引入虚拟同步机控制,同时为提高动态响应,在暂态中又引入自适应惯量的模糊控制。
2.1 MMC变换器的虚拟同步机控制策略
MMC在传统定直流电压控制的基础上引入VSG控制,可以在外特性上将其等效为同步发电机或电动机,有效提升系统惯性与阻尼,实现对上级电网的电压、频率支撑,如图2所示。
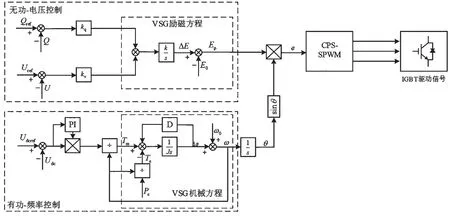
图2 MMC变换器控制框架
虚拟同步电机的转子机械特性方程为:

式中,J为转子转动惯量;D为阻尼系数;Tm为机械转矩;Te为电磁转矩;ω为虚拟转子角速度;ω0为网侧同步角速度;θ为功角。
MMC交流侧虚拟同步电机控制时输入的电磁功率Pe及机械功率Pm为:

式中,id为输入电流在d轴上的分量;iq为输入电流在q轴上的分量;ud为电网电压在d轴上的分量;uq为电网电压在q轴上的分量。
根据图2,式(5)中的直流电流额定值Idcref为电压环输出,即:

式中,Kpd为PI控制器的比例;Kid为PI控制器的积分系数;Udcref为直流电压参考值;Udc为直流电压采样值。
根据VSG励磁方程,交流侧MMC输出电压幅值及无功功率表达式为:

式中,E0为基准电压幅值;kq为无功调节系数;kv为电压调节系数;k为积分调节系数;Uref、U分别为交流侧电压有效值的参考值和实际测量值。
将MMC各子模块均压调制信号与整体调制信号相叠加得到各子模块总的调制信号,采用载波移相调制策略,得到MMC各子模块IGBT的驱动信号,从而实现多电平调制。
2.2 基于自适应虚拟惯量的虚拟同步机控制策略
可再生能源出力的随机性和波动性对系统的安全稳定运行带来挑战,传统的同步发电机借助固定参数的转动惯量与阻尼去平抑波动或干扰。实际上,由扰动引起的功率或频率变化是一个震荡并衰减的过程,随着惯性时间常数的增大,输出有功功率振荡加剧,并且振荡周期变长。与传统同步机相比,采用自适应虚拟同步机的控制策略可以在暂态中调节转动惯量和阻尼系数,使系统尽快恢复稳态运行,在保证频率振荡抑制性能的同时缩短响应时间。为了保持MMC变换器内功率动态平衡,需要实时进行有功调节,要求虚拟同步机能够抑制功率调节过程中的频率振荡现象。基于此,通过基于模糊控制的自适应虚拟同步机控制策略提升控制系统对频率振荡的抑制能力。图3为虚拟同步机功率与角频率变化曲线。

图3 虚拟同步机功率与角频率变化曲线
a阶段为加速阶段,在此阶段内VSG转子角频率大于电网角频率且,因此需要适当加大转动惯量J以抑制角频率ω的增长,从而避免造成更大的转速超调。b阶段为减速阶段,在此阶段内VSG转子角频率由极大值逐渐减小,但由于惯性作用仍大于电网角频率,因此可以采用较小的转动惯量J使角频率尽快减小至稳定值。同理,c阶段与d阶段也需要适当调整转动惯量J与阻尼系数D。综上,转动惯量与阻尼系数的大小实际上是转子角速度变化率和角速度偏差Δω共同决定的。
本文采用模糊算法动态调整转动惯量,输入变量选为角速度偏差Δω及变化率,输入基本论域均设置为[-1,1];输出变量为惯量变换量ΔJ,其隶属度函数论域设置为[-0.6,0.6]。输出的模糊集为{NL(负大),NS(负小),ZE(零),PS(正小),PB(正大)},输入输出的隶属度函数如图4所示。
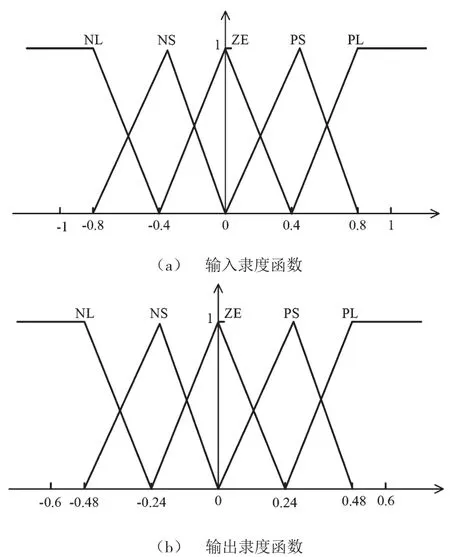
图4 输入及输出隶度函数
2.3 小信号分析
在虚拟同步机策略中,转动惯量与阻尼大小均会影响输出频率及功率的暂态特性。在动态过程中,适当调节转动惯量与阻尼参数可以加快系统恢复稳定的过程。为了得到的额定虚拟参数取值范围,需要建立相应的小信号模型。
在高压交流系统中,传输线路中感抗远大于阻抗,有功传输功率表达式为:

式中,E为变换器输出电压;U为电网电压;X为线路的感抗。针对图2中的有功控制部分,VSG的有功功率的小信号控制框架如图5所示。

图5 有功功率小信号控制框架
传递函数为:

特征根为:

输出有功功率的传递函数的零极点随惯性时间常数变化的运动轨迹如图6所示。当惯性时间常数H增大时,系统动态过程中振荡逐渐加剧且振荡频率逐渐减小,动态调节时间加长。

图6 惯性时间常数H变化对应的零极点图
由式(10)可知有功功率传递函数本质上是一个二阶传递函数,当阻尼比取0.707时,系统能够取得较好的动态响应。阻尼系数D的表达式为:

转动惯量的取值范围可根据系统的稳定边界来确定。为了保证控制系统稳定,两个特征根需位于复平面的左半部分,一般阻尼系数相对较小,因此特征根的实部实际上仅由转动惯量确定,转动惯量满足大于0即可保证系统稳定。
3 仿真结果分析
在Simulink上搭建MMC变换器拓扑结构的仿真模型,具体的仿真参数包括高压交流母线电压为10 kV、高压直流母线电压为15 kV、MMC桥臂电感为4 mH、MMC子模块电容为1 mF以及MMC子模块数为10个。仿真工况设置MMC工作在逆变模式下,设定MMC的交流侧在1~3 s时发生功率阶跃,采用传统虚拟同步发电机控制策略与本文所提的模糊自适应虚拟同步机控制策略的响应特性对比如图7所示。
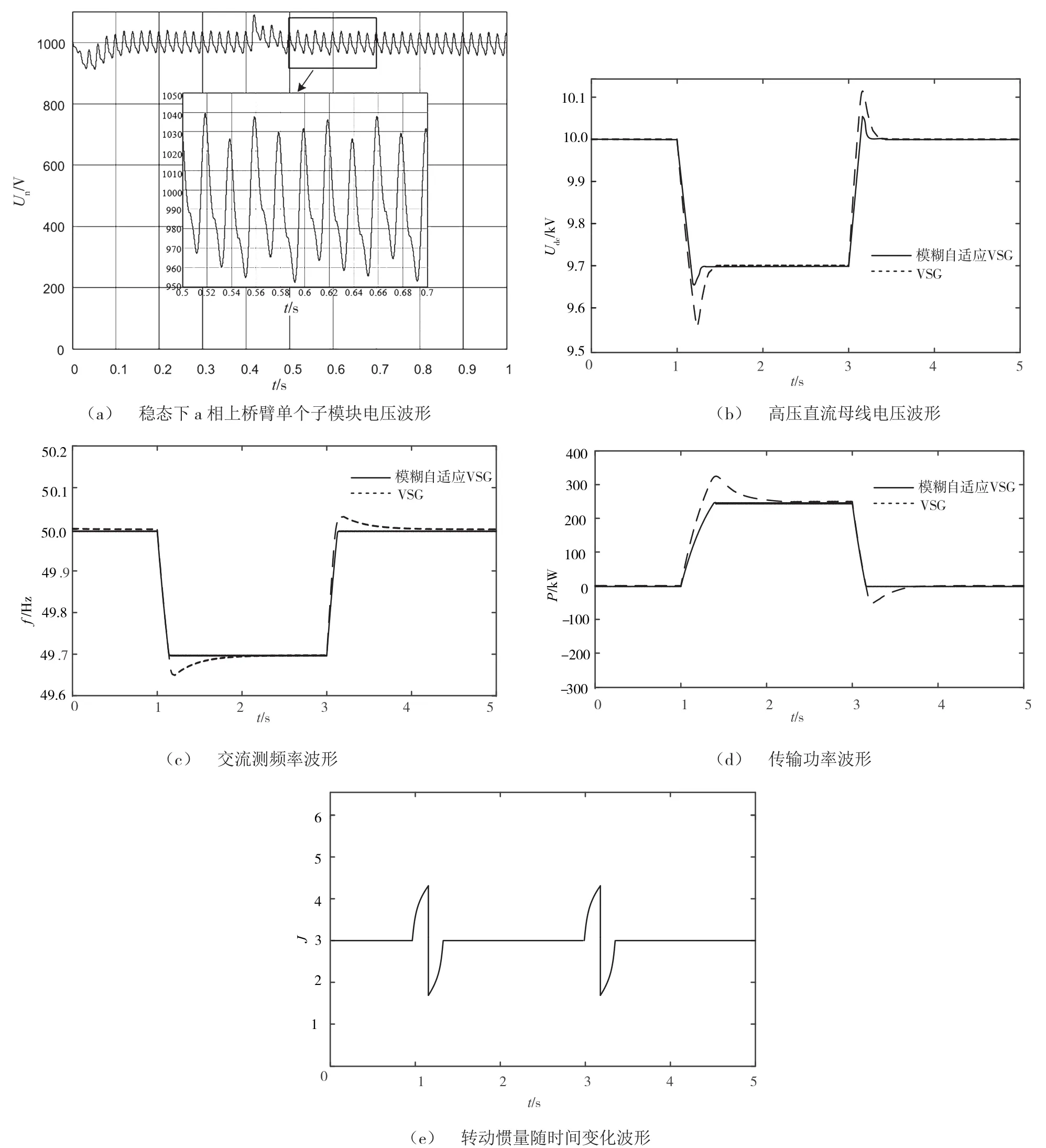
图7 仿真波形
图7(a)为系统稳态情况下a相上桥臂单个子模块电压波形,单个模块电压偏差较小,波动电压的偏差在5%以内。图7(b)为高压侧直流母线电压在传统VSG控制策略与模糊自适应VSG控制策略控制下的仿真波形,由于VSG的功率响应由直流母线电压控制环产生,因此无论采用何种VSG控制均为直流侧电压提供了一定的惯性,波动在允许的范围内,有助于系统的稳定运行。此外,采用模糊自适应的VSG控制策略能够优化直流电压的动态特性。图7(c)为能量路由器交流侧频率响应波形,当交流侧负荷在1 s突增时,传统VSG控制策略下频率振荡的幅值为0.36 Hz,经过2 s的暂态过程恢复稳定,而采用模糊自适应虚拟同步机控制策略,频率变化的幅值仅为0.3 Hz,经过约1.2 s就能恢复稳定。由此可见,自适应虚拟控制策略对频率变化具有提升动态响应、抑制波动的作用。
图7(d)为MMC变换器传输功率波形。整个仿真过程中,随着负荷功率变化,MMC变换器处于逆变状态。当MMC变换器采用传统VSG控制时,传输功率也具备一定的惯性,但总体波动幅度较模糊自适应VSG控制策略更大且动态时间更长。图7(e)为整个仿真过程中转动惯量J的变换波形,在交流侧负荷突增导致频率跌落且频率变化率逐渐减小时,适当增加转动惯量有助于加速频率稳定。当系统检测到频率变化率逐渐增大且频率变化量减小时,通过减小转动惯量可以改善系统的暂态过程,有助于系统快速恢复稳定。这与前述的理论分析相符合,验证了本文所提模糊自适应VSG控制方法的有效性。综上,模糊自适应的VSG控制与传统VSG控制相比,能够优化系统的动态特性,提高系统动态稳定性。
4 结 论
本文针对MMC提出虚拟同步机机控制策略,可以有效增加系统惯量及阻尼。在此基础上,根据暂态中功角特性关系,采用模糊控制提出基于虚拟惯量的自适应虚拟同步机控制,有效提升了系统的动态特性,使得MMC能够协调高效运用。与传统虚拟同步机控制相比,模糊自适应VSG控制策略能加快系统动态响应速度,抑制系统波动,优化频率和输出功率响应特性。随着我国电力市场改革不断深入,越来越多的分布式电源将接入电网运行。分布式能源具有间接性、随机性、不稳定性等特征,并网会对大电网产生冲击,使电网运行的安全稳定性受到影响。后续研究中尝试将控制策略与实验有效结合,通过理论联系实际,进一步验证控制策略的有效性。
猜你喜欢
电气技术(2022年10期)2022-10-25 00:45:48
现代电力(2022年2期)2022-05-23 12:46:16
大电机技术(2022年1期)2022-03-16 06:40:08
防爆电机(2020年4期)2020-12-14 03:11:02
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
