基于FANUC 0i 数控系统的硬件模拟及实物连接训练单元设计
2021-04-13 01:34:06任重,言帆
湖南工业职业技术学院学报 2021年1期
任 重,言 帆
(长江工程职业技术学院,湖北 武汉,430212)
FANUC 0i 数控系统机床控制部分由CNC 系统、I/O 模块、电源模块、伺服放大器、伺服电机等多个硬件组成。为使机床能够正常工作,各硬件接口之间必须保证连接正确。因此,硬件连接训练是数控机床装配调试与维修专业方向实训的第一个重要环节[1]。
1 问题的提出
FANUC 0i 数控系统机床的伺服放大器有αi和βi 伺服放大器两个系列,主轴控制方式也分模拟主轴和串行主轴两种方式,将其综合起来共有5种硬件连接形式,包括CNC 系统在内共14 种硬件。如果仅是进行硬件连接训练而将这14 种硬件全部购置齐全,且要满足单个班级学生同时训练就需要多套,则设备购置成本太高,造成极大的设备闲置与浪费。而且,从实训教学的角度,如果学生在不了解数控机床硬件连接各接口情况下,贸然去进行实物硬件连接训练,实训教学效果将大打折扣。
另外,在进行硬件实物连接过程中需要经常插拔硬件接口连接器以实现不同的硬件组合形式,长此以往会引起接口器件老化、接触不良等问题,引发设备故障和安全隐患。
2 解决问题的方法
采取模块化的设计理念,将硬件连接训练划分为单个工位硬件模拟连接训练单元和公共实物硬件延长线对接验证两个部分。即整个实训中心仅购置一套完整的公共实物硬件,学生首先在单个工位进行硬件模拟连接训练,最后再通过接口延长线的方式将各公共硬件之间及与电气柜之间连接到位,即硬件实物连接,达到验证训练结果的目的。
2.1 单个工位硬件模拟连接的设计
根据FANUC 0i 数控系统硬件选型和连接原理图,分别在每个硬件需要连接的接口位置设置模拟连接插口。学生可以用连接线在各模拟连接插口之间模拟硬件连接的过程,熟悉各硬件接口的位置和连接关系。图1 为FANUC 0i 数控系统硬件连接示意图[2],图2 为Fanuc 0i-TF 数控车床βi系列双体型伺服放大器模拟主轴连接形式的原理图[3]。
2.1.1 Fanuc 0i 数控系统硬件的连接形式
2.1.1.1 Fanuc 0i-TF 数控车床αi 系列伺服放大器(两种连接形式)
(1)串行主轴(一体型伺服放大器)
硬件组成:操作面板—CNC 系统—I/O 模块—电源模块PSM—主轴放大器SPM—伺服放大器SVM(一体型伺服放大器)—主轴伺服电机—进给伺服电机(X 轴)—进给伺服电机(Z 轴)
(2)模拟主轴(变频器)
硬件组成:操作面板—CNC 系统—I/O 模块—电源模块PSM—变频器—伺服放大器SVM(一体型伺服放大器)—主轴电机(普通三相电机)—脉冲编码器—进给伺服电机(X 轴)—进给伺服电机(Z 轴)
2.1.1.2 Fanuc 0i-TF 数控系统βi 伺服放大器(三种连接形式)
(1)串行主轴(一体型伺服放大器)
硬件组成:操作面板—CNC 系统—I/O 模块—伺服放大器SVPM(一体型伺服放大器)—主轴伺服电机—进给伺服电机(X 轴)—进给伺服电机(Z轴)
(2)模拟主轴(单体型伺服放大器,变频器)
硬件组成:操作面板—CNC 系统—I/O 模块—变频器—伺服放大器SVM(X 轴单轴控制)—伺服放大器SVM(Z 轴单轴控制)—主轴电机(普通三相电机)—脉冲编码器—进给伺服电机(X 轴)—进给伺服电机(Z 轴)
(3)模拟主轴(双体型伺服放大器,变频器)
硬件组成:操作面板—CNC 系统—I/O 模块—变频器—伺服放大器SVM(X、Z 轴双体型伺服放大器)—伺服放大器SVM(Z 轴单轴控制)—主轴电机(普通三相电机)—主轴脉冲编码器—进给伺服电机(X 轴)—进给伺服电机(Z 轴)。
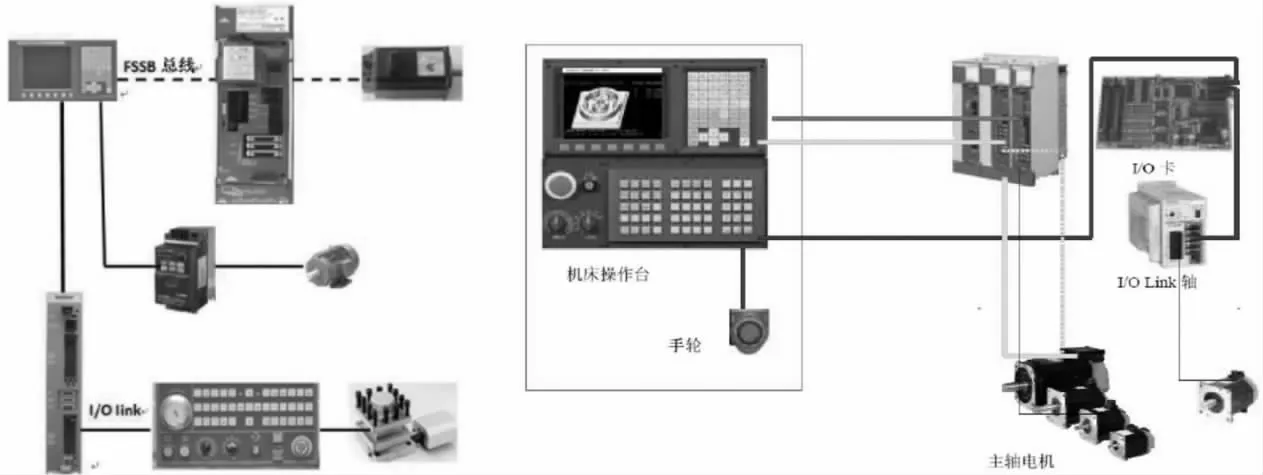
图1 FANUC 0i 数控系统硬件连接示意图
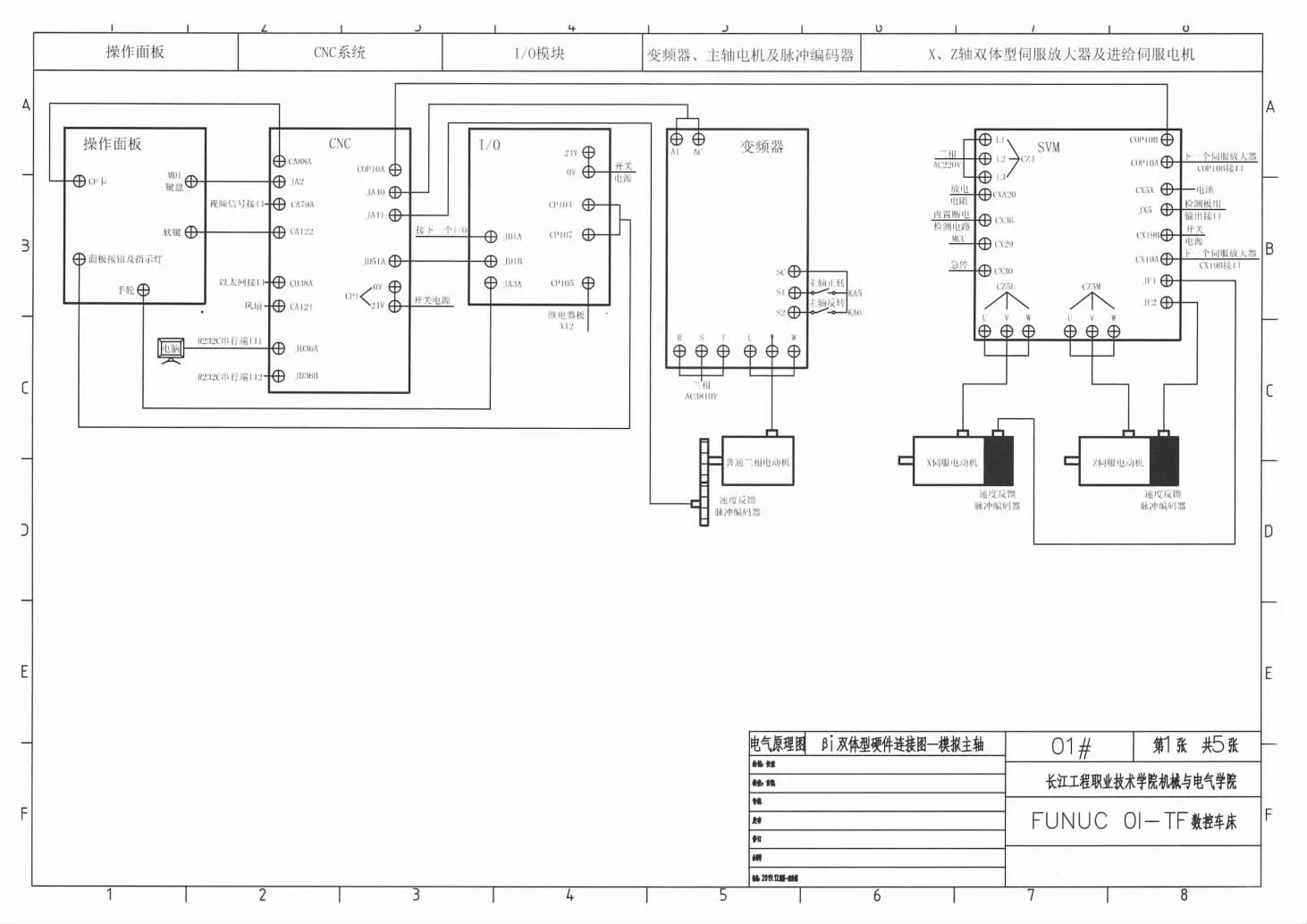
图2 βi 系列双体型伺服放大器—模拟主轴连接形式原理图
2.1.2 硬件模拟连接训练模块的制作
将上述5 种连接形式要用到的14 种硬件参照实物形式用塑料板制作成14 个训练模块,并在每个模块的模拟连接接口位置安装KT4ABD52 护套插座,如图3、4 所示训练模块的模拟接口位置设计及训练单元的整体布局。
2.1.2.1 模拟连接接口位置的设计
(1)操作面板
共安装5 个KT4ABD52 护套插座,位置分别在1、CF 卡接口;2、软键;3、指示灯;4、MDI 键盘;5、手轮。
(2)CNC 系统
共安装8 个KT4ABD52 护套插座,位置分别在1、COP10A 接口;2、CA122 接口;3、JA2 接口;4、JA40 接口;5、JD51A 接口;6、JA41 接口;7、CP1 电源接口;8、CA88A 接口。
(3)I/O 模块设置
共安装6 个KT4ABD52 护套插座,位置分别在1、CP1 接 口;2、CB104 接 口;3、JA3 接 口;4、JD1A 接口;5、JD1B 接口;6、CB106 接口。
(4)电源模块PSM
共安装10 个KT4ABD52 护套插座,位置分别在1、TB1 接 口;2、CX1A 接 口(220v 输 入);3、CX1B 接口(220v 输出);4、CX2A 接口(DC 24v输出);5、CX2B 接口(DC 24v 输入);6、JX1B 主轴放大器接口;7、CX3 主轴控制信号接口;8、CX4 急停接口;9、S1 开关接口;10、三项交流电输入接口。
(5)主轴放大器SPM
共安装12 个KT4ABD52 护套插座,位置分别在1、TB1 接口;2、CX2A 接口(DC 24v 输出);3、CX1B 接口(220v 输出);4、CX2B 接口(DC 24v 输入);5、JX1A 接口;6、JX1B 接口;7、JA7B 接口;8、JB7A 接口;9、JY2 接口;10、JY3 接口;11、JY4 接口;12、主轴伺服电机接口。
(6)αi 系列一体型伺服放大器
共安装9 个KT4ABD52 护套插座,位置分别在1、CX1A 接口(DC 24v 输出);2、CX1B 接口(DC 24v 输入);3、JX14 接口;4、JX1B 接口;5、JF1 接口;6、JF2 接口;7、COP10B 接口;8、COP10A 接口;9、三项交流电输出接口。
(7)βi 系列一体型伺服放大器SVPM
共安装16 个KT4ABD52 护套插座,位置分别在1、CX3 接口;2、CX4 接口(DC 24v 输出);3、CX36 接 口;4、CXA2C 接 口;5、CXC2A 接 口;6、COP10B 接口;7、COP10A 接口;8、JF1 接口;9、JF2接口;10、JF3 接口;11、JA7B 接口;12、JYA2 接口;13、JYA3 接口;14、TB1 接 口;15、C22 接 口;16、TB2 接口。
(8)βi 系列伺服放大器SVM(X、Z 轴双体型伺服放大器)
共安装11 个KT4ABD52 护套插座,位置分别在1、CXA19B 接口;2、CXA19A 接口;3、COP10B接口;4、COP10A 接口;5、JF1 接口;6、JF2 接口;7、CX29 接口;8、CX30 接口;9、三项交流电输入接口;10、X 轴伺服电机接口;11、Z 轴伺服接口。
(9)βi 系列伺服放大器SVM(X 或Z 轴单轴控制)
共安装9 个KT4ABD52 护套插座,位置分别在1、CXA19B 接口;2、CXA19A 接口;3、COP10B 接口;4、COP10A 接口;5、JX5 接口;6、JF1 接口;7、三项交流电输入接口;8、CX29 接口;9、CX30 接口。(10)频器(6 个KT4ABD52 护套插座)
共安装6 个KT4ABD52 护套插座,位置分别在1、三项交流电输入接口;2、主轴正转接口;3、主轴反转接口;4、主轴停止接口;5、JA40 接口;6、三项交流电输出接口。
(11)主轴伺服电机
共安装2 个KT4ABD52 护套插座,位置分别在1、动力接口;2、反馈接口。
(12)进给伺服电机
共安装2 个KT4ABD52 护套插座,位置分别在1、动力接口;2、反馈接口。
(13)主轴电机(普通)
共安装1 个KT4ABD52 护套插座,位置在1、动力接口。
(14)主轴脉冲编码器
共安装1 个KT4ABD52 护套插座,位置在1、反馈接口。
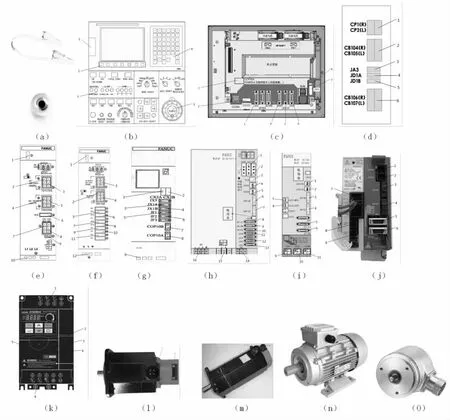
图3 训练模块接口位置设计图
a—KT4ABD52 迭插线及护套操作b—操作面板c—CNC 系统d—I/O 模块e—电源模块PSM f—主轴放大器SPM
g—αi 一体型伺服放大器h—βi 一体型伺服放大器SVPM i—βi 伺服放大器SVM(X、Z 轴双体型伺服放大器)
j—βi 伺服放大器SVM(X 或Z 轴单轴控制)k—变频器l—主轴伺服电机m—进给伺服电机n—主轴电机(普通)O—主轴脉冲编码器
2.1.2.2 训练单元的整体布局
将上述14 个训练模块安装到单个工位硬件模拟与实物连接训练单元上,让学生根据硬件连接形式,用KT4ABD52 迭插线模拟硬件连接的过程,实现在硬件实物连接训练之前预热的目的。
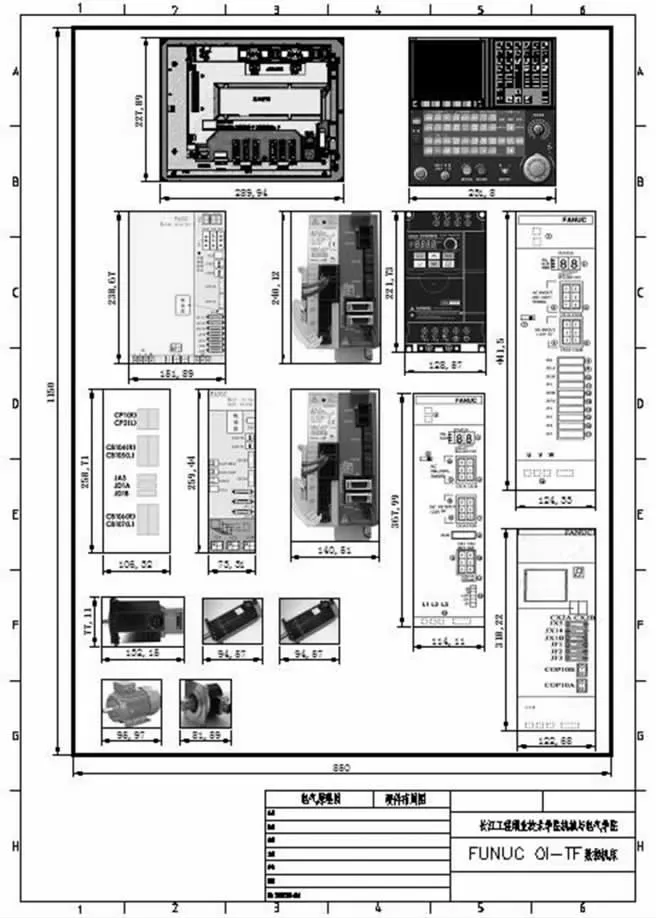
图4 训练模块的整体布局
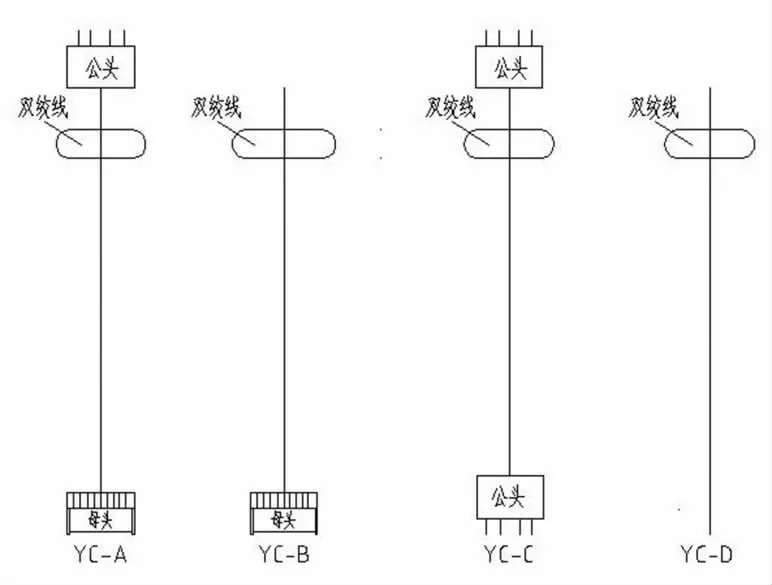
图5 接口延长类型
2.2 公共实物硬件延长线的规划与设计
学生在硬件模拟连接训练后,可以在公共实物硬件上进行真实连接。但长期直接在硬件设备上进行插拔连接器等操作会引起接口老化、松动、接触不良等问题,形成设备安全隐患。针对这个问题,可以通过设计接口延长线的方法来解决。
2.2.1 接口延长线的概念和类型
硬件接口延长线有YC-A、YC-B、YC-C 和YC-D 四种型号,其中YC-A 和YC-B 型延长线用于将硬件接口引入到硬件连接板或端子排上;YC-C 和YC-D 型延长线用于硬件连接板之间及端子排之间进行连接。
YC-A 型延长线是双绞线一端为与硬件接口相同型号的母接头,一端为相配套的公插头,公插头和母接头可以配套插接的引出线,主要用于将硬件上的母接头引出至硬件连接板上;YC-B 型延长线是只有一端为母接头的双绞线,用于将硬件上的接线端子引出至硬件连接板上;YC-C 型延长线是双绞线两端均为可与硬件母接口配套插接的公插头,可以作为两个硬件连接板上对应母接头之间的连接线;YC-D 型延长线就是一根双绞线,用于将硬件上接线端子引出至端子排及作为两个端子排之间的连接线,如图5 所示的YC-A、YC-B、YC-C 和YC-D 四种型号接口延长线示意图。
2.2.2 接口延长线的规划与设计
接口延长线的规划与设计分7 个步骤,分别为:
第一步,根据硬件连接形式遴选出需要连接的硬件;
第二步,罗列出各硬件间要连接的接口;
第三步,将所有的需要连接的硬件接口用YC-A 型延长线引出至连接板A 和B 上;
第四步,将连接板A 和B 上的其他母接口用YC-B 型延长线引出至端子排XT1A、XT2A 和XT3A 上;
第五步,将电气柜电源等与端子排XT1B、XT2B、XT3B 的相应端子连接到位;
第六步,将连接板A 和B 对应的母接口用YC-C 型延长线进行连接;
第七步,端子排XT1A、XT2A、XT3A 与端子排XT1B、XT2B、XT3B 相应端子之间用YC-D 型延长线进行连接,如图6 所示的βi 双体型伺服放大器—模拟主轴连接形式的接口延长线规划设计图。
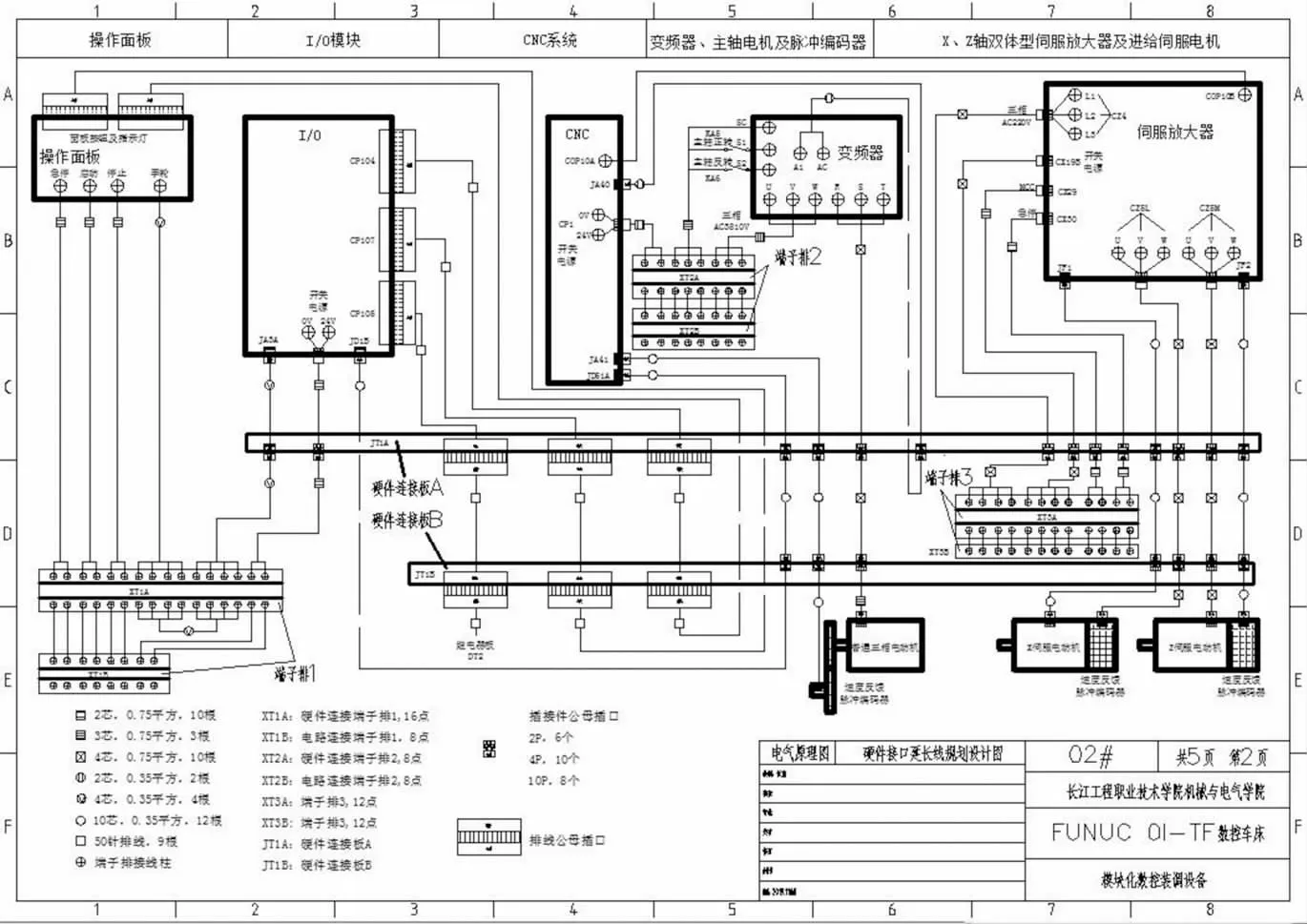
图6 硬件接口延长线规划设计图
由图6 可知:各硬件间所有要连接的硬件插口都是通过YC-A 型接口延长线引出至硬件连接板A 或B 上, 其他与电气柜连接的接口均通过YC-B 直接引出至端子排XT1A、XT2A 和XT3A上,电气柜与硬件相连接的部分引出至端子排XT1B、XT2B 和XT3B 上。学生在训练时无须再去硬件接口上插拔连接器,只需用YC-C 型接口延长线在A、B 硬件连接板之间,用YC-D 在A、B 端子排之间进行连接训练即可,减少了硬件接口元器件的损耗,防止设备出现安全隐患。
2.2.3 接口延长线器件配置
为保证采用接口延长线进行硬件连接后,数控机床能够正常工作,需要对所需硬件接口连接器、连接线等进行梳理,购置达到设计要求的器件[4],如接口延长线所需器件一览表如表1 所示。
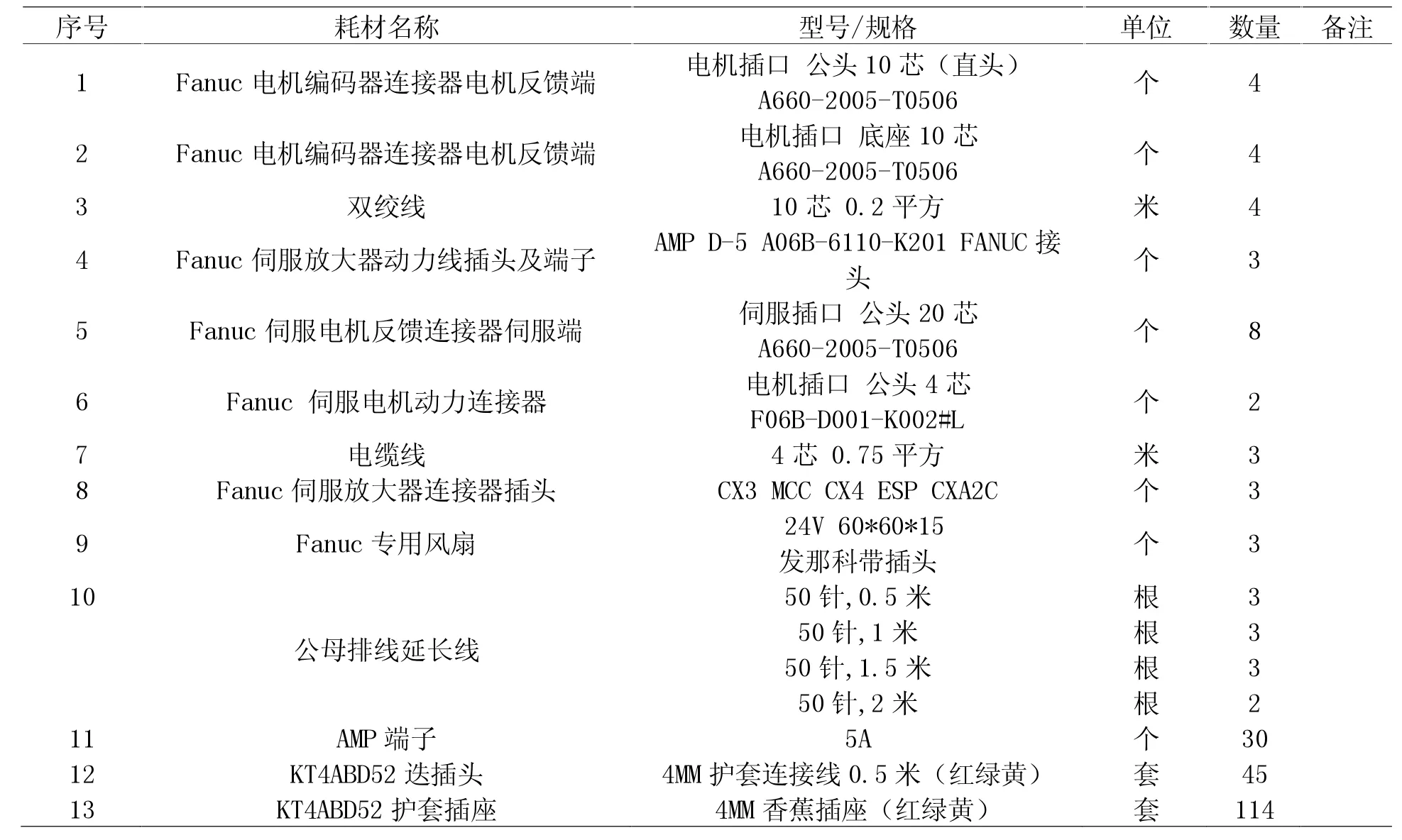
表1 接口延长线所需器件一览表
3 结语
本文以提高实训教学效果,减少器件损耗、杜绝安全隐患为目的设计了一套硬件模拟及实物连接训练单元。并详细以Fanuc 0i-TF 数控系统βi系列双体型伺服放大器—模拟主轴连接形式为例介绍了硬件接口的规划和设计方法,具有实训内容安排灵活、设备投入少、器件损耗少、安全性高等特点,为其他数控装调实训设备的研究与开发提供了一种新的思路。
猜你喜欢
建筑与预算(2024年2期)2024-03-22 06:51:42
科学家(2021年24期)2021-04-25 12:55:27
初中生学习指导·中考版(2020年4期)2020-09-10 07:22:44
学苑创造·A版(2016年1期)2016-03-10 18:10:20
橡胶工业(2015年5期)2015-08-29 06:48:02
橡塑技术与装备(2015年7期)2015-07-03 12:17:51
橡胶工业(2015年7期)2015-02-25 09:22:22
橡胶工业(2015年5期)2015-02-24 17:13:51
建筑与预算(2014年4期)2014-11-18 13:10:36
建筑与预算(2014年3期)2014-04-11 07:28:36